AR Configurator 8
Руководство пользователя
Установка
Windows
Подробнее
Выполните установку (активируется двойным кликом по приложению);
На рабочем столе появится иконка приложения;
Конфигуратор запускается через иконку на рабочем столе.
Debian-системы (Astra Linux, Ubuntu, Mos OS)
Подробнее
Скачайте файл AR-Configurator_linux_x64_8.x.x.deb (где 8.x.x - версия конфигуратора);
Откройте терминал в папке с конфигуратором;
Выполните команду (после ввода команды может потребоваться ввод пароля от системы);
sudo dpkg -i AR-Configurator_linux_x64_8.x.x.deb
// 8.x.x - замените на Вашу версию
// например: dpkg -i AR-Configurator_linux_x64_8.0.0.rpm- После первой установки deb-пакета введите команды (после ввода команды может потребоваться ввод пароля от системы);
sudo usermod -a -G tty $USER
sudo usermod -a -G dialout $USER
reboot- После перезагрузки конфигуратор готов к работе. Конфигуратор запускается командой:
ar-configuratorДля удаления конфигуратора введите команду (после ввода команды может потребоваться ввод пароля от системы):
sudo dpkg -r ar-configuratorCalculate Linux
Подробнее
Скачайте AR-Configurator_linux_CALCULATE_x64_8.x.x.zip (где 8.x.x - версия конфигуратора);
Разархивируйте архив;
В появившейся папке откройте терминал и выполните команду (это сделает скрипт установщика исполняемым, после ввода команды может потребоваться ввод пароля от системы):
sudo chmod +x install_calculate_linux.sh- Выполните установку, введя команду
sudo ./install_calculate_linux.sh- Перед первым запуском конфигуратора выполните команду (это сделает команду запуска исполняемой, после ввода команды может потребоваться ввод пароля от системы):
sudo chmod +x run_calculate_linux.sh- Для запуска конфигуратора выполните скрипт
sudo ./run_calculate_linux.shRPM-системы (RedOS, Alter Linux)
Подробнее
Скачайте AR-Configurator_linux_x64_8.x.x.rpm (где 8.x.x - версия конфигуратора);
Откройте терминал в папке с конфигуратором;
Выполните команду (после ввода команды может потребоваться ввод пароля от системы);
sudo rpm -i AR-Configurator_linux_x64_8.x.x.rpm
// 8.x.x - замените на Вашу версию
// например: sudo rpm -i AR-Configurator_linux_x64_8.0.0.rpm- После первой установки deb-пакета введите команды (после ввода команды может потребоваться ввод пароля от системы);
sudo usermod -a -G tty $USER
sudo usermod -a -G dialout $USER
rebootПосле перезагрузки конфигуратор готов к работе.
Конфигуратор запускается командой:
ar-configuratorДля удаления конфигуратора введите команду (после ввода команды может потребоваться ввод пароля от системы):
sudo rpm -e ar-configuratorDiff и dump файлы
Подробнее
Что такое diff?
diff (от слова difference - разница) - это команда CLI, которая выводит все измененные параметры (разницу между предустановленными параметрами и настройками, внесенными пользователем)
Где и как посмотреть diff
- Откройте Конфигуратор и зайдите во вкладку Командная строка
- Введите команду
diff
Как сохранить diff?
- Откройте Конфигуратор и зайдите во вкладку Командная строка
- Введите команду
diff - После выводы команды нажмите Сохранить в файл
- После сохранения убедитесь, что расширение файла .txt, если требуется, измените его
Как загрузить готовый diff?
- Откройте Конфигуратор и зайдите во вкладку Командная строка
- Введите команду
defaults(данная команда сотрет все имеющиеся настройки) - Дождитесь перезагрузки
- Зайдите во вкладку Командная строка
- Нажмите Загрузить из файла
- Нажмите Выполнить и дождитесь перезагрузки
В соответствии с версии ПО выберите последний актуальный diff (дата релиза указана в описании), или в соответствии с поставленной задачей Например, diff ara_edu_tc3_17-02-25.txt необходим для программируемых полетов (ссылка), а для ручного управления лучше выбрать ara_edu_diff_02-06-25 (no GPS).txt
Быстрый старт
Подробнее
Чтобы запустить Конфигуратор, подключите полетный контроллер к персональному компьютеру по проводу или сети.
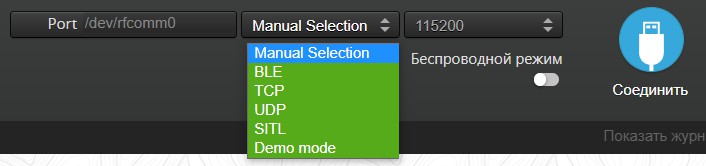
Доступно беспроводное подключение по протоколам TCP, UDP, BLE (Bluetooth), SITL (симулятор).
По проводу подключение происходит через COM-порт, Конфигуратор автоматически выберет подходящий порт. Чтобы проверить, что Конфигуратор подключил нужное устройство, зайдите в Диспетчер устройств.
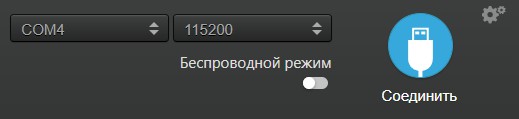
После выбора порта, установите baudrate (бодрейт ‒ скорость передачи данных) 115200, нажмите на синюю кнопку «Соединить», после чего станут доступны вкладки Конфигуратора.
Если соединение не успешно, проверьте работоспособность порта подключения, провода и разъема на плате. Чтобы посмотреть вкладки без подключения к полетному контроллеру, выберите Demo Mode.
Ручная настройка
Установка
Подробнее
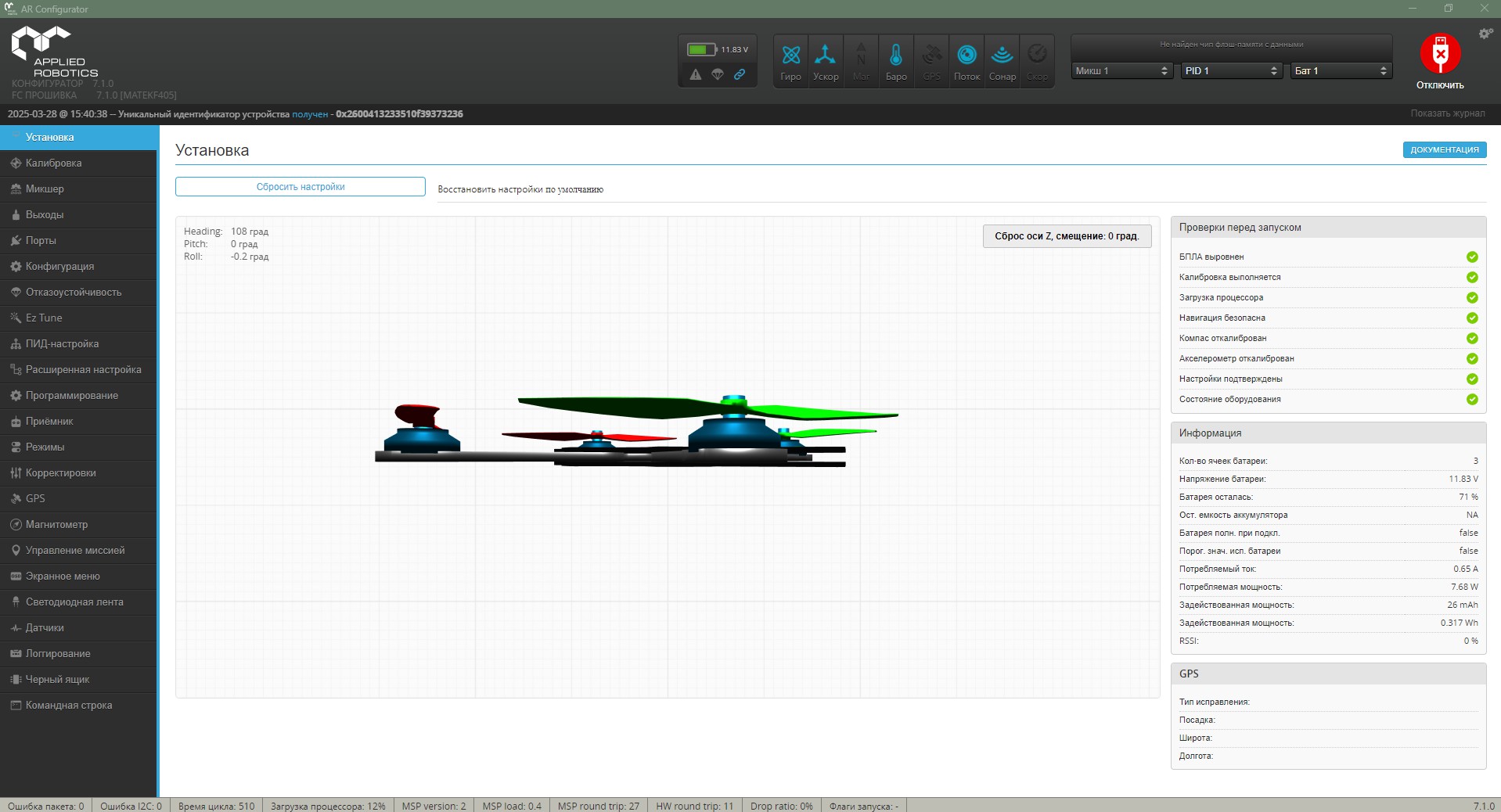
После успешного соединения открывается раздел Установка.
В данном разделе отображается следующая информация:
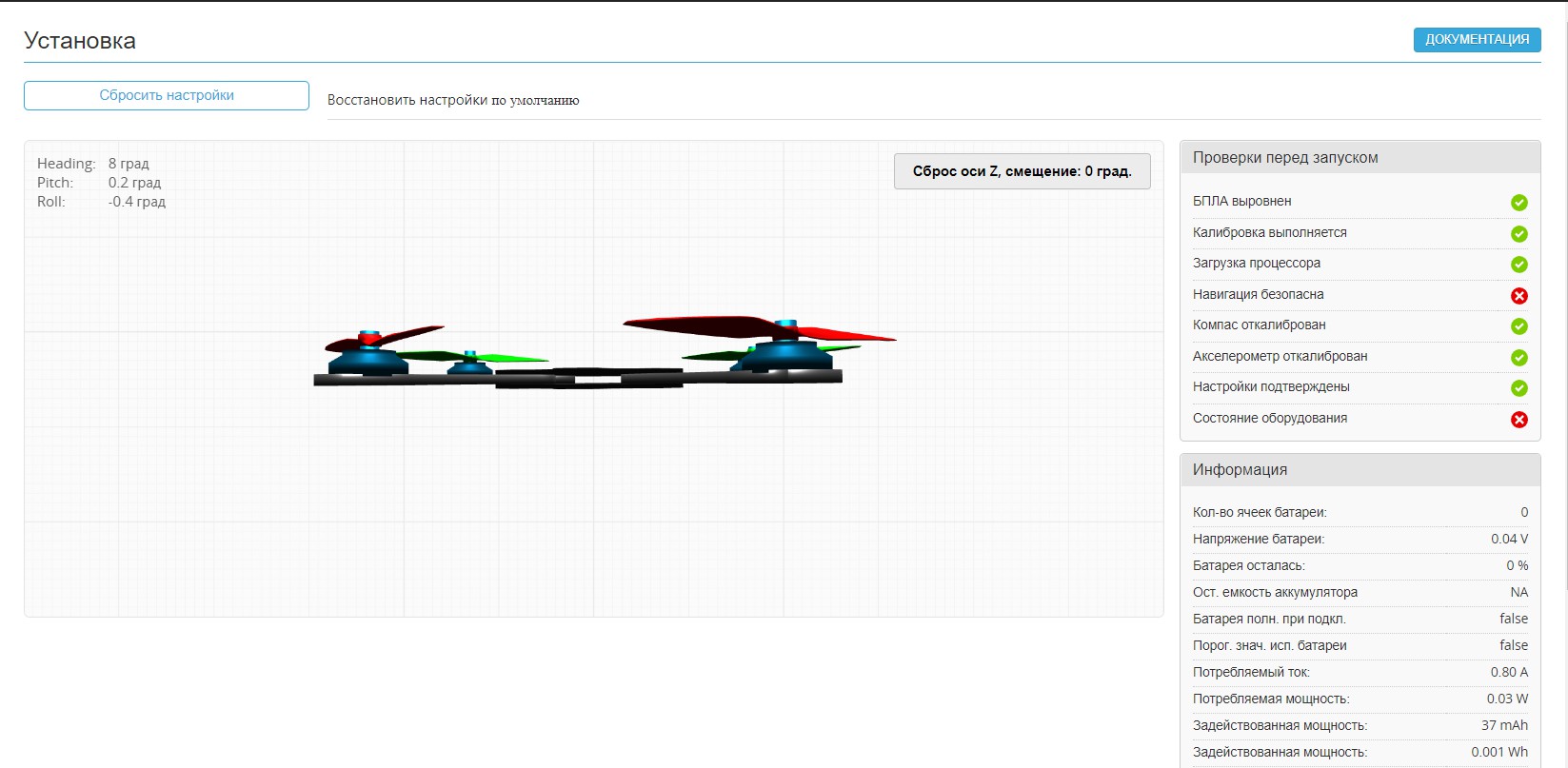
- информация предварительной проверки (Проверки перед запуском), которая предотвратит включение двигательной установки, если перед началом движения будет обнаружена какая-либо проблема, включая пропущенную калибровку, конфигурацию или неверные данные датчиков. Если проверка прошла успешно, напротив неё появится зеленый кружок с галочкой, если не прошла, появится красный кружок с крестиком.

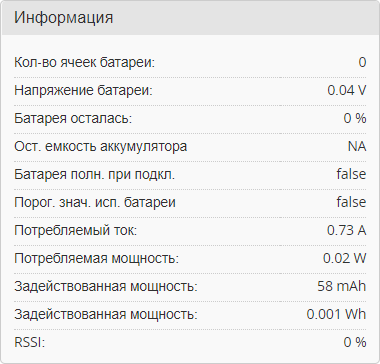
- информация о текущем состоянии системы питания
- информация о положении дрона по датчику GPS

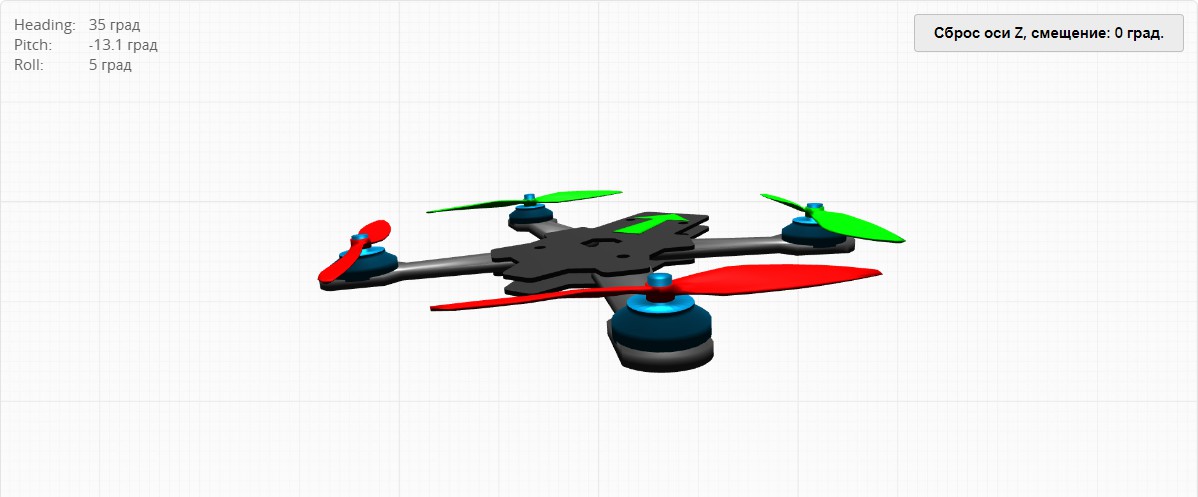
- данные по отклонениям по осям (крен, тангаж, рыскание)
- кнопки сброса и восстановления настроек


- перемещение БВС в пространстве
Другие данные, которые отображаются на экране постоянно:
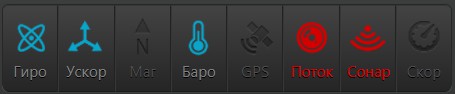
- подключение датчиков. Если какой-либо датчик горит красным цветом ‒ связь с ним не установлена, если синим ‒ подключение успешно, если датчик темно серый ‒ датчик отключен и данные от него не ожидаются.
- напряжение АКБ

- Номер профиля настроек для микшера, ПИД и АКБ

- Строка состояния. Здесь выводятся ошибки, препятствующие запуску системы, а также информация о передаче данных с полетного контроллера


- Версия конфигуратора и прошивка
Калибровка
Подробнее
Раздел Калибровка отвечает за настройку датчиков положения. Здесь можно откалибровать акселерометр, датчик оптического потока, магнитометр в соответствии с окружающей средой.
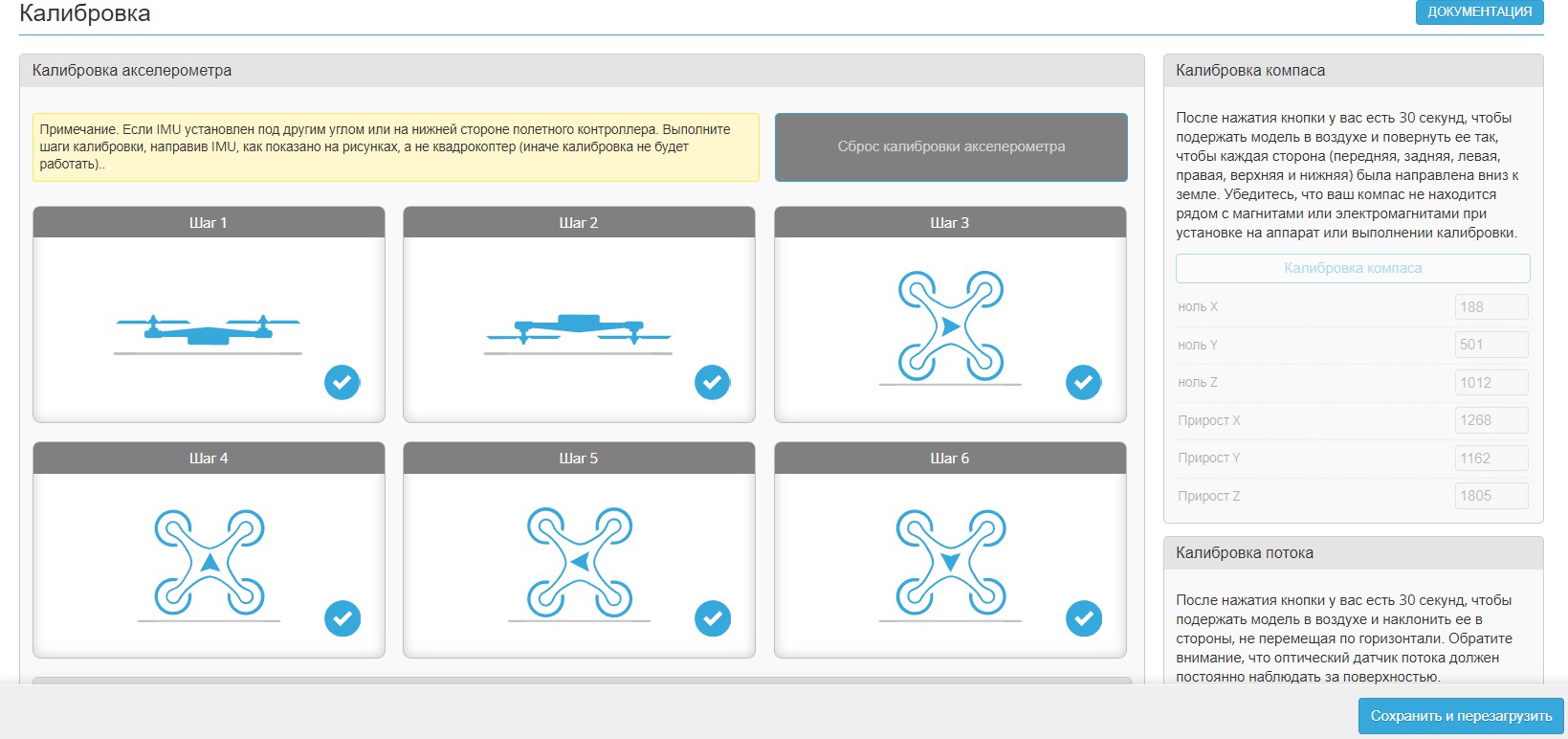
Чтобы откалибровать акселерометр, нажмите кнопку «Калибровка акселерометра». Поворачивайте и удерживайте полетный контроллер в тех положениях, которые изображены в конфигураторе.
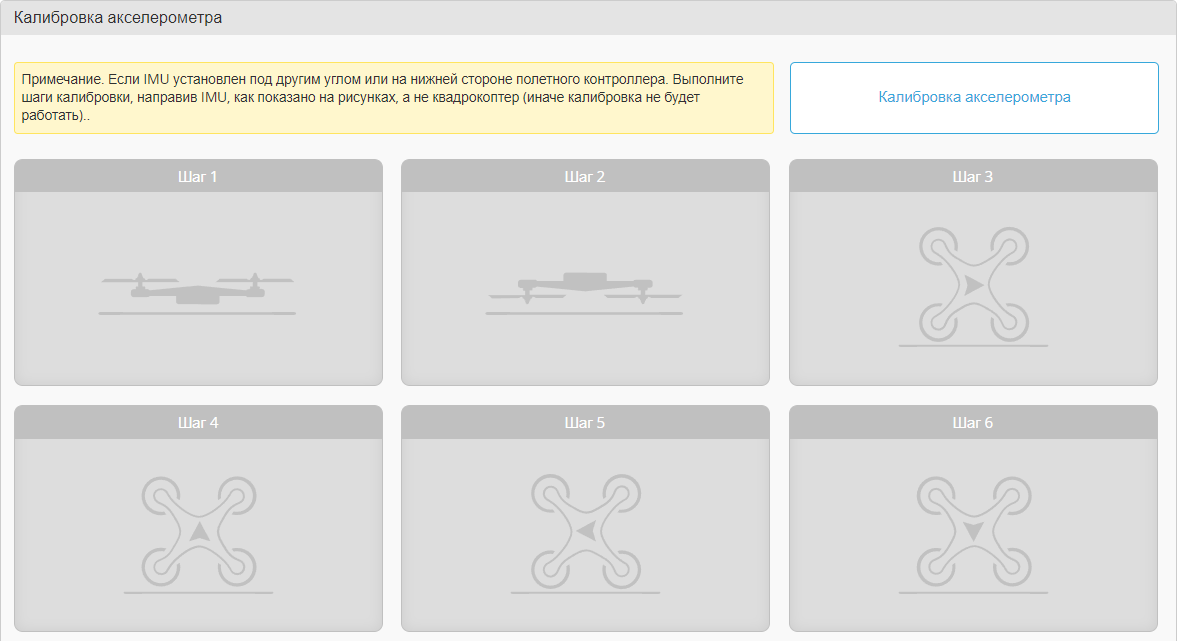
После успешной калибровки все этапы загорятся синим.
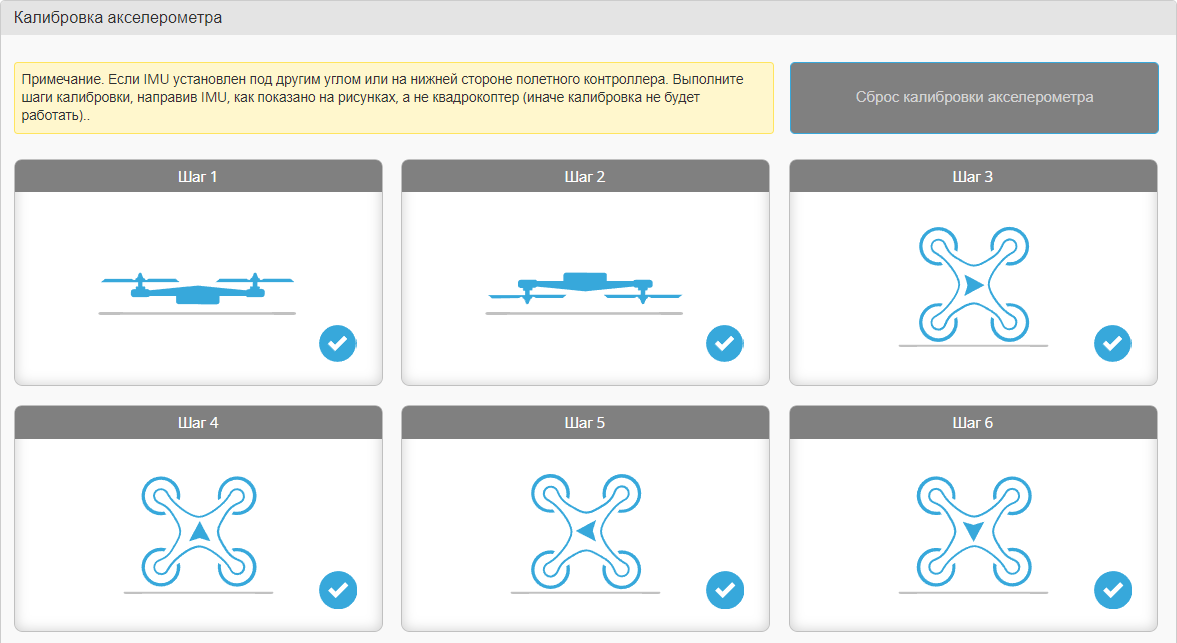
Нажмите «Сохранить и перезагрузить».

Чтобы откалибровать датчик оптического потока нажмите кнопку «Калибровка потока». После нажатия кнопки у вас есть 30 секунд, чтобы подержать модель в воздухе и наклонить ее в стороны, не перемещая по горизонтали. Обратите внимание, что оптический датчик потока должен постоянно наблюдать за поверхностью. После калибровки выводится Шкалы, если значения диапазоне от 4 до 5, то результат калибровки считается приемлемым, иначе перекалибруйте.
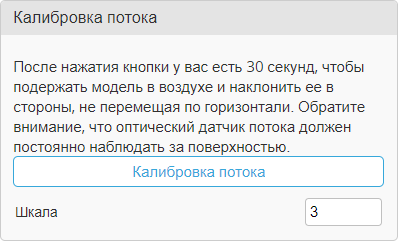
После калибровки значение шкалы оптического потока изменится. Нажмите «Сохранить и перезагрузить».
Чтобы откалибровать магнитометр нажмите кнопку «Калибровка компаса». После нажатия кнопки у вас есть 30 секунд, чтобы подержать модель в воздухе и повернуть ее так, чтобы каждая сторона (передняя, задняя, левая, правая, верхняя и нижняя) была направлена вниз к земле. Убедитесь, что ваш компас не находится рядом с магнитами или электромагнитами при установке на аппарат или выполнении калибровки.
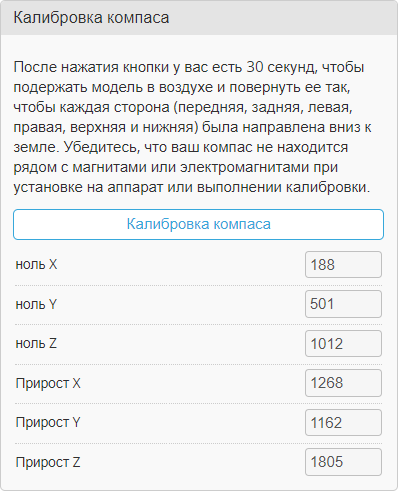
После калибровки изменятся значения компаса по осям. Нажмите «Сохранить и перезагрузить».
Значения шкал датчиков можно задать вручную ‒ в разделе или через командную строку.

Микшер
Подробнее
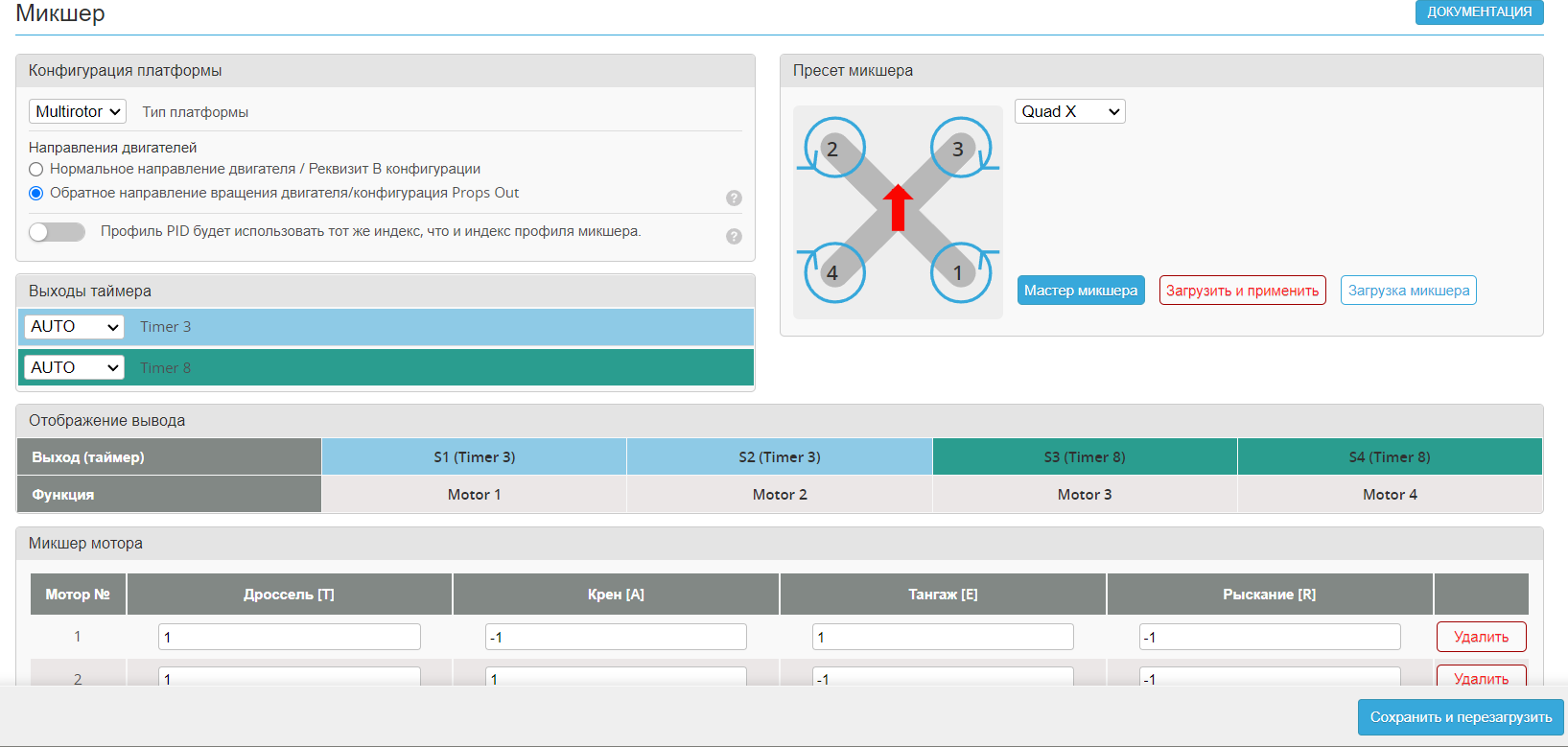
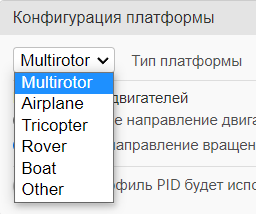
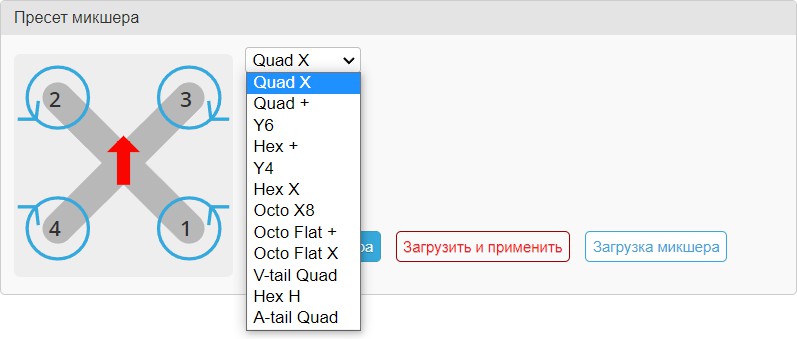
В разделе Микшер определяются PWM выходы БВС. Здесь можно установить пресеты (готовые настройки) для каждого типа БВС.
ОБРАТИТЕ ВНИМАНИЕ
НАСТРОЙКА МИКШЕРА ПРОИЗВОДИТСЯ СО СНЯТЫМИ ПРОПЕЛЛЕРАМИ
Тип платформы (мультиротор, трикоптер, самолет и т.д.) можно выбрать в открывающейся сноске. Внутри каждого типа можно выбрать его разновидность в соответствии с размещением моторов и сервоприводов.
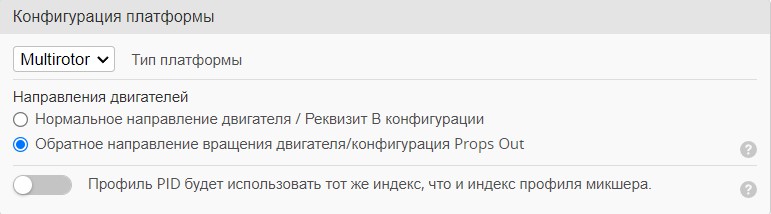
Выбор направления двигателей

Соответствие профиля микшера и профиля ПИД-регуляторов будет обозначать, что, например, первый профиль настроек микшера будет соответствовать первому профилю настроек ПИД-регуляторов.

Профиль ‒ перечень настроек. Дифф может содержать в себе несколько профилей настроек с разными значениями параметров. Например, в первом профиле тип платформы ‒ квадрокоптер, в во втором ‒ самолет. Переключение между профилями можно подключить через режимы.
Пресеты автоматически выставляют значения моторов и сервоприводов по осям, пользователи могут менять их вручную.
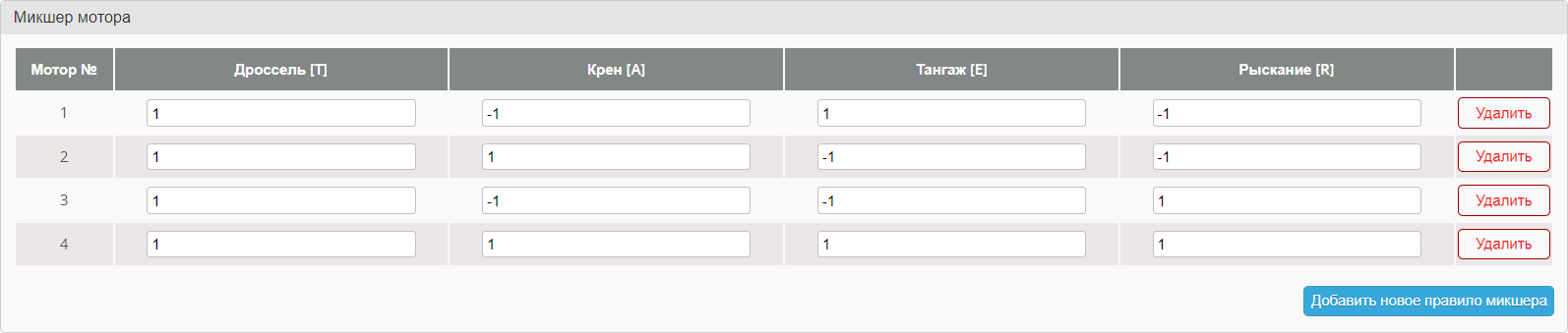
В поле «Микшер моторов» можно добавлять и удалять моторы, задавать им настройки. Для каждого канала управления устанавливается численное значение ‒ вес его управляющего сигнала.
- Дроссель - Диапазон [0.0; 1.0], Двигатель с весом 0.5 получит команду в 2 раза меньше, чем с весом 1.0
- Крен - Диапазон [-1.0; 1.0], Для моделей самолетного типа - 0, так как крен осуществляется за счет отклонения управляющих поверхностей. Для мультироторовположительныйвес обеспечит пропорциональную реакцию мотора на управляющий сигнал, а отрицательныйвес обратно пропорциональную реакцию. То есть, при отклонении в положительную сторону стика управления мотор с положительным весом ускорится, а мотор с отрицательным весом замедлится.
- Тангаж - Диапазон [-1.0; 1.0], Для моделей самолетного типа - 0, так как тангаж осуществляется за счет отклонения управляющих поверхностей. Для мультироторовположительныйвес обеспечит пропорциональную реакцию мотора на управляющий сигнал, а отрицательныйвес обратно пропорциональную реакцию. То есть, при отклонении в положительную сторону стика управления мотор с положительным весом ускорится, а мотор с отрицательным весом замедлится.
- Рыскание - Диапазон [-1.0; 1.0], Для моделей самолетного типа с 1 двигателем 0, с более, чем 1 двигатель настраивается дифференциальная тяга. Для мультироторовположительныйвес означает, что двигатель по часовой стрелке должен ускориться после положительного (по часовой стрелке) управляющего сигнала. Отрицательныйвес означает, что двигатель должен замедлиться.
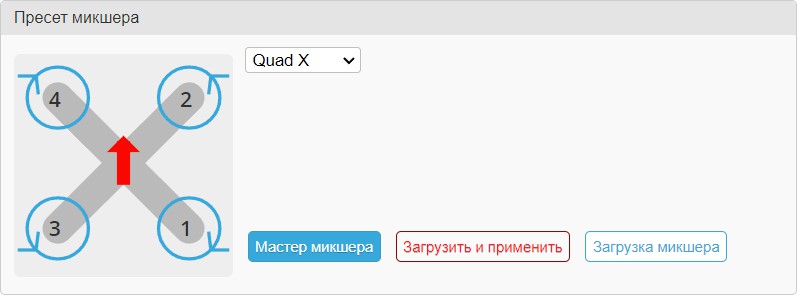
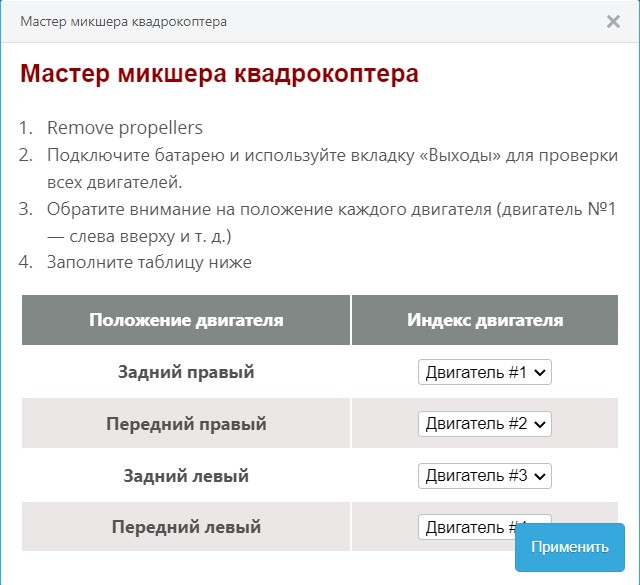
Раздел «Мастер Микшера» позволяет назначить положения моторов.
В поле «Выходы таймера» можно настроить какие таймеры будут ответственны за моторы, а какие за сервоприводы.

В поле «Микшер сервопривода» можно добавлять и удалять сервоприводы, задавать им значения и область обработки, например - крен, тангаж, статическое значение.

После выбора пресета необходимо выбрать «Загрузить и применить».

После настройки нажмите «Сохранить и перезагрузить».

Выходы
Подробнее
Раздел «Выходы» служит для проверки моторов и сервоприводов, здесь можно покрутить мотором, не используя пульт.
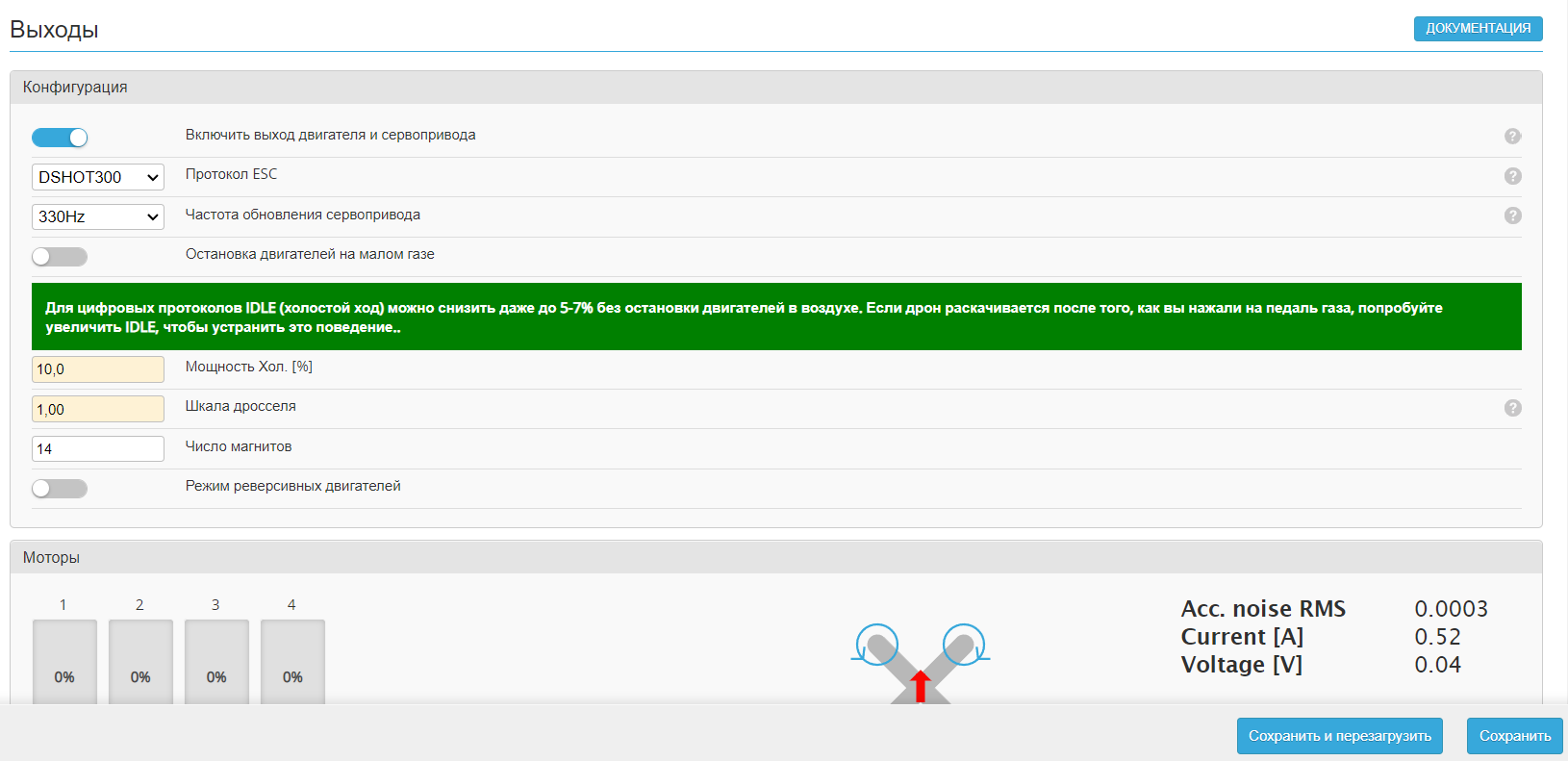
Здесь указываются:
- Протокол общения ESC полетного контроллера
- Частота обновления сервоприводов ‒ параметр зависит от модели сервопривода, большинство сервоприводов работают на 50 Гц.

- Мощность холостого хода ‒ определяет процент от максимальной силы хода, при котором БВС не взлетает. То есть, с такой мощностью будут крутиться моторы при активации ARM и удержании стика газа в нижней позиции.

- Шкала дросселя ‒ позволяет ограничить мощность газа, при значении 1 мощность не ограничивается, при значении 0,5 мощность уменьшается вдвое.

- Число магнитов ‒ это характеристика установленных моторов, данный параметр необходимо установить для корректной подачи напряжения на моторы.

В данном разделе включаются:
- Вывод двигателей и сервоприводов ‒ активация настройки параметров.

- Остановка двигателей на малом газу ‒ на холостом газу двигатель будет останавливаться.

- Режим реверсивных двигателей

Реверс ‒ движение в обратном направлении. Реверс работает для всех двигателей.
ОБРАТИТЕ ВНИМАНИЕ
ПЕРЕД АКТИВАЦИЕЙ МОТОРОВ ДЛЯ ПРОВЕРКИ СНИМИТЕ ПРОПЕЛЛЕРЫ
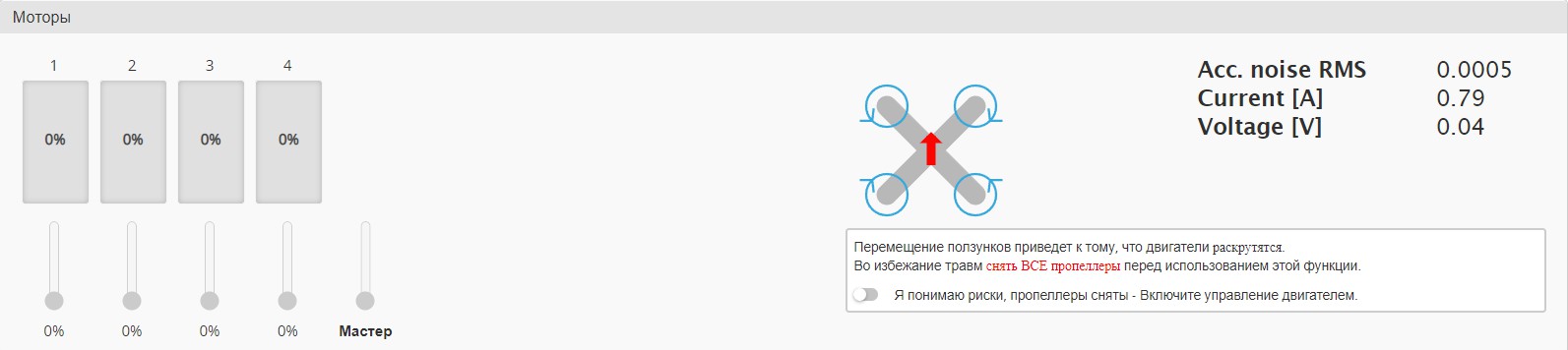
Активируйте «Включить выход двигателя и сервопривода» (предосторожность, предотвращающая повреждение моторов и сервоприводов сразу после перепрошивки полетного контроллера). Активируйте ползунок «Я принимаю риски, пропеллеры сняты - Включите управление двигателем».

Для включения моторов осторожно поднимайте ползунок соответствующего мотора или всех сразу (ползунок «Мастер»). Если подключение моторов и ESC выполнено верно, моторы закрутятся. Обратите внимание, что моторы можно будет протестировать только с включенной батареей.
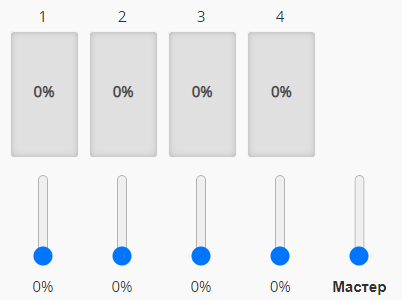
В поле «Сервоприводы» настраиваются максимальное, минимальное и среднее значение для каждого сервопривода, а также скорость, направление отклонения и пины подключения. Наименование в данном разделе соответствует номеру в разделе «Микшер».
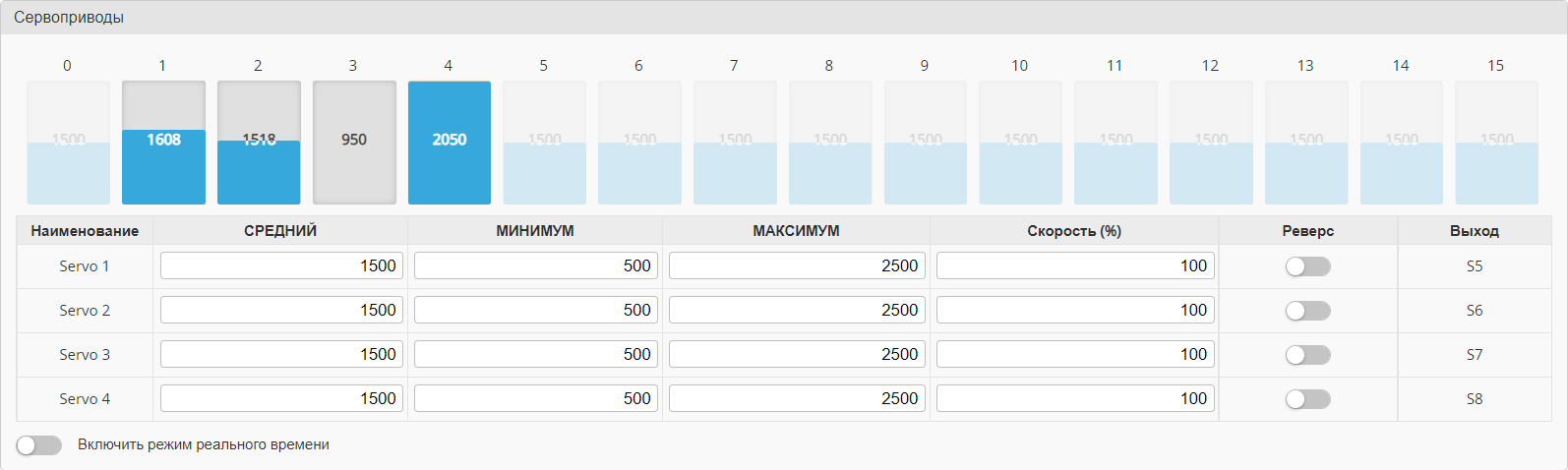
После настройки нажмите «Сохранить и перезагрузить».

Порты
Подробнее
В разделе Порты отображаются все доступные UART-порты подключения и их конфигурации.
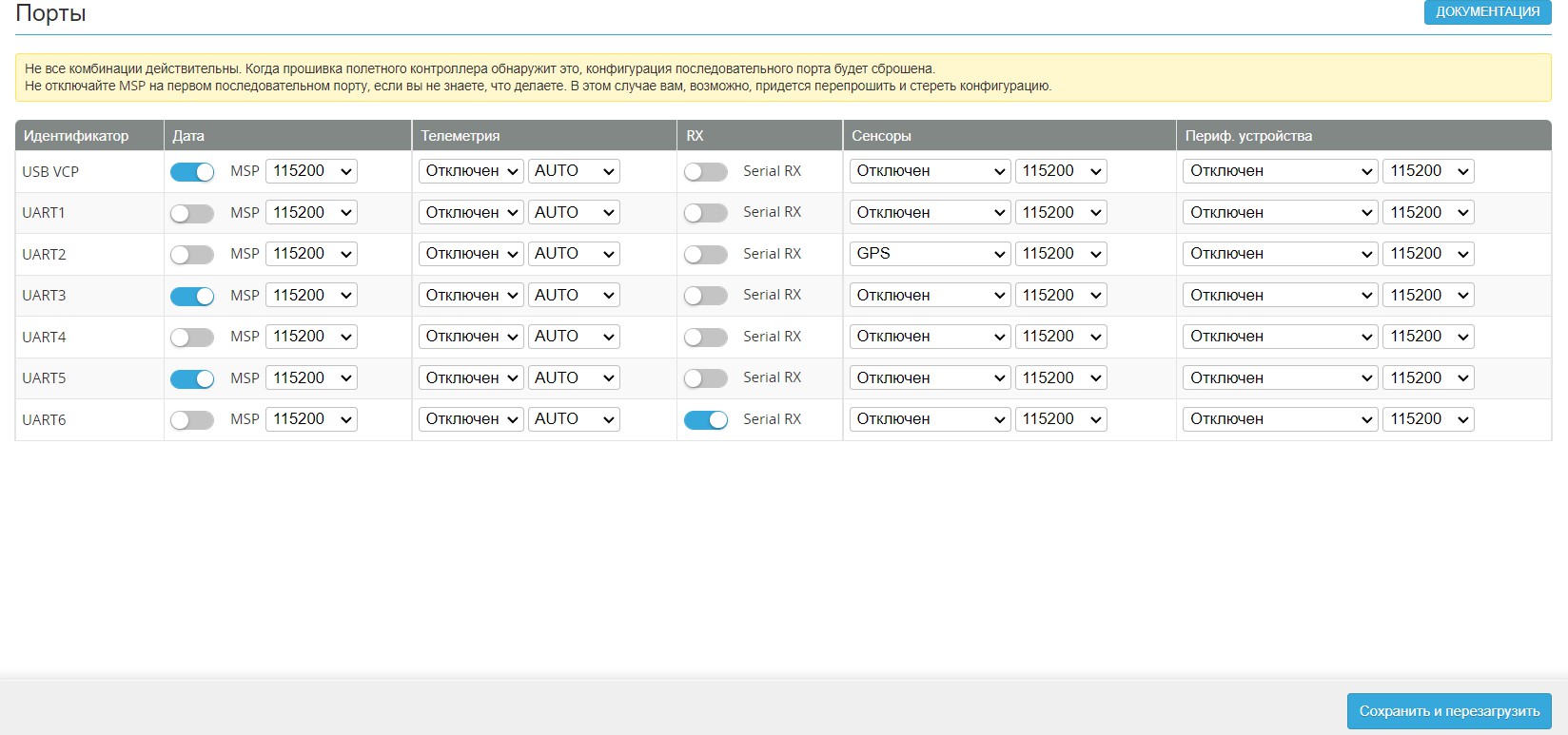
Количество доступных портов определяются возможностями платы полетного контроллера.
Для каждого порта выбирается скорость и протокол передачи данных, возможность телеметрии, подключенный датчик или периферийное устройство.

Режим MSP позволяет передавать данные через протокол MSP ‒ основной протокол общения с полетным контроллером, режим Serial RX нужен для подключения радиоприемника для пульта управления. А также есть возможность подключения внешних сенсоров, например, GPS.
Активируйте режим Serial RX, на том порте, к которому физически подключен приемник, на портах, к которым подключены датчики и периферийные устройства, выставите протокол MSP.

UART VCP ‒ это обозначение microUSB порта.

После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

Конфигурация
Подробнее
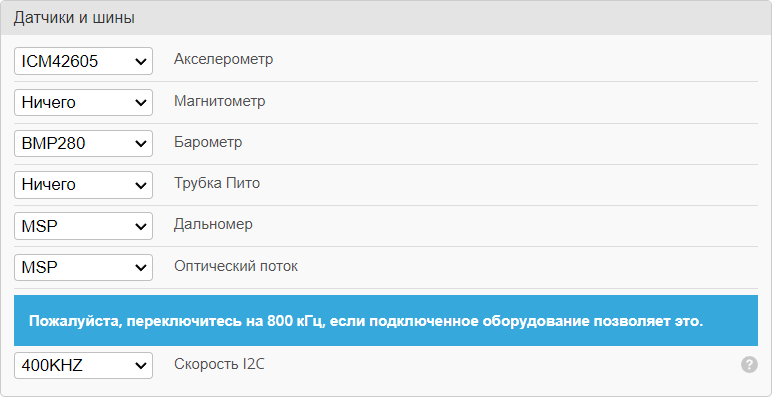
В разделе Конфигурация можно настроить датчики и шины данных, датчики напряжения и тока, выставить параметры батареи. В прочих настройках можно определить вывод телеметрии, регистрацию полетных данных и другое.
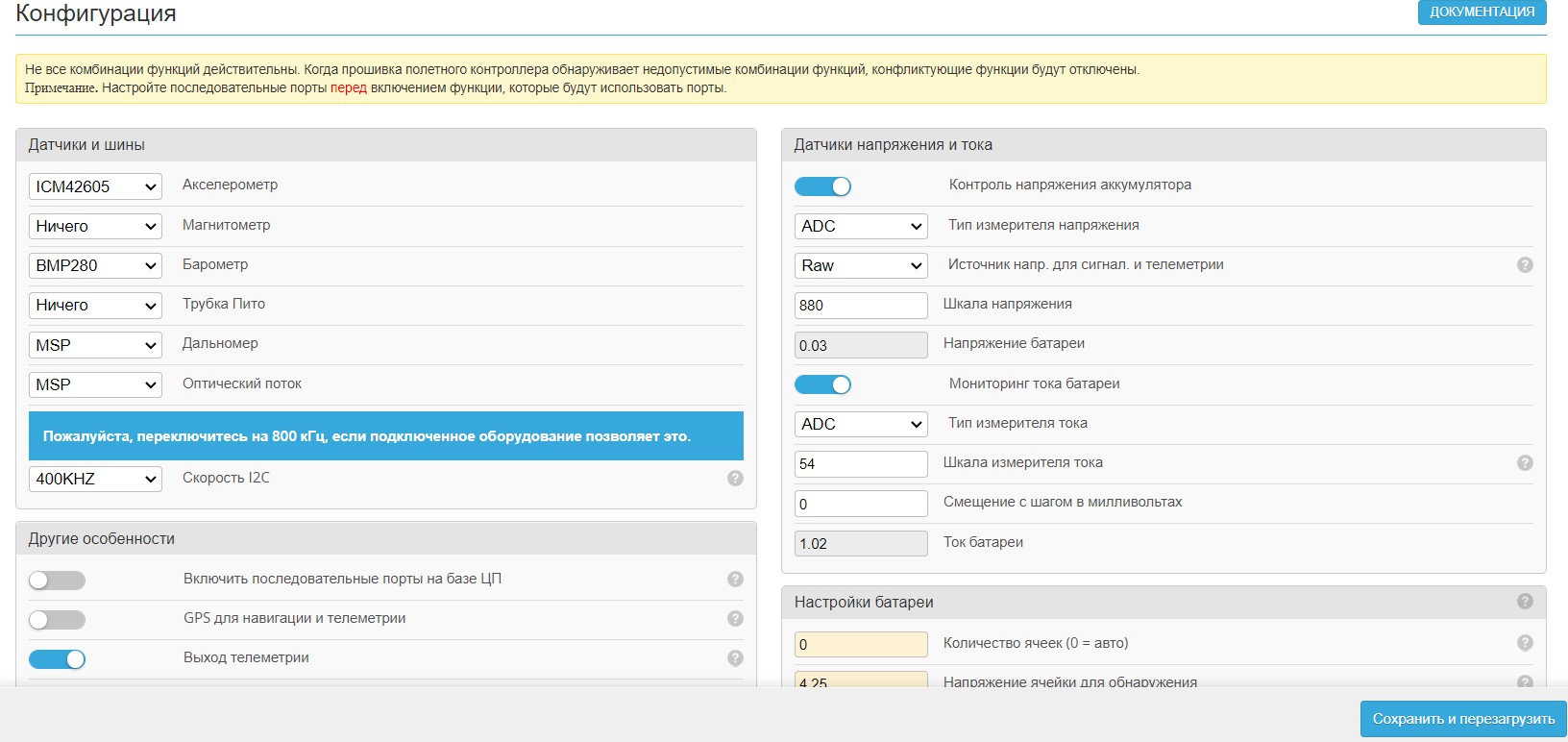
В «Датчики и шины» для каждого устройства выбирается модель этого устройства. В режиме «AUTO» программное обеспечение определяет автоматически модель устройства.
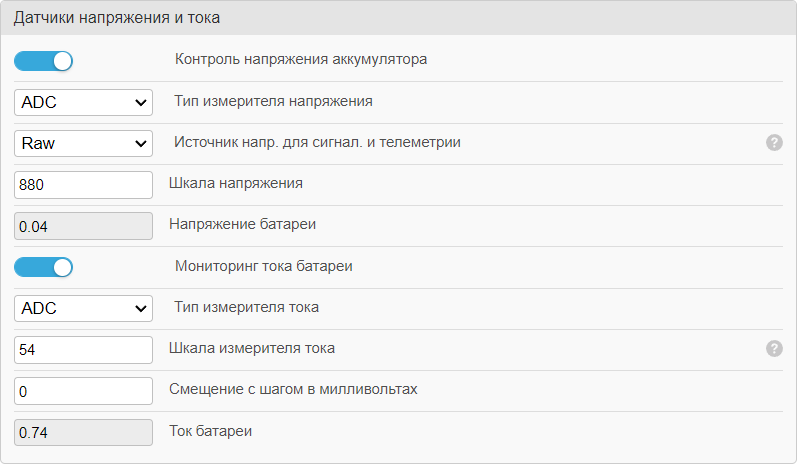
«Датчики напряжения и тока». Здесь можно настроить контроль аккумуляторной батареи. Настройки будут влиять на обработку данных с датчика напряжения и отображения его в конфигураторе.
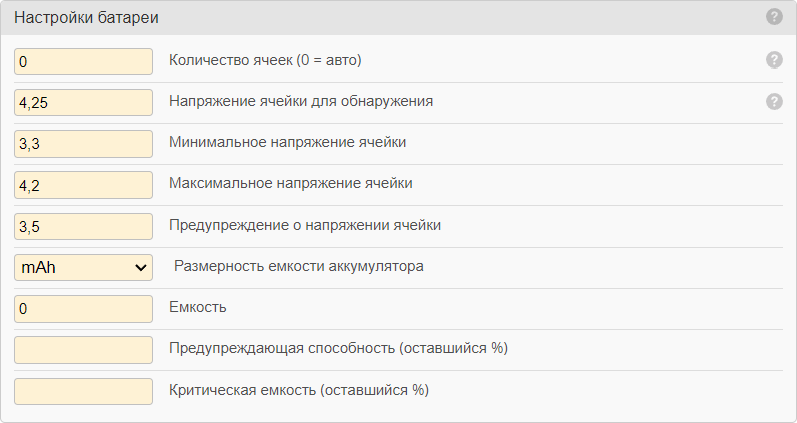
«Настройки батареи» учитывают особенности используемого типа АКБ. Минимальное и максимальное напряжение определяют ограничение по безопасному подключению АКБ. Если ячейка АКБ имеет напряжение меньше или больше установленных значений, система безопасного запуска не даст летательный аппарат. Если не установить минимальное значение, схема разрядит аккумуляторную батарею полностью, что приведет к её порче.
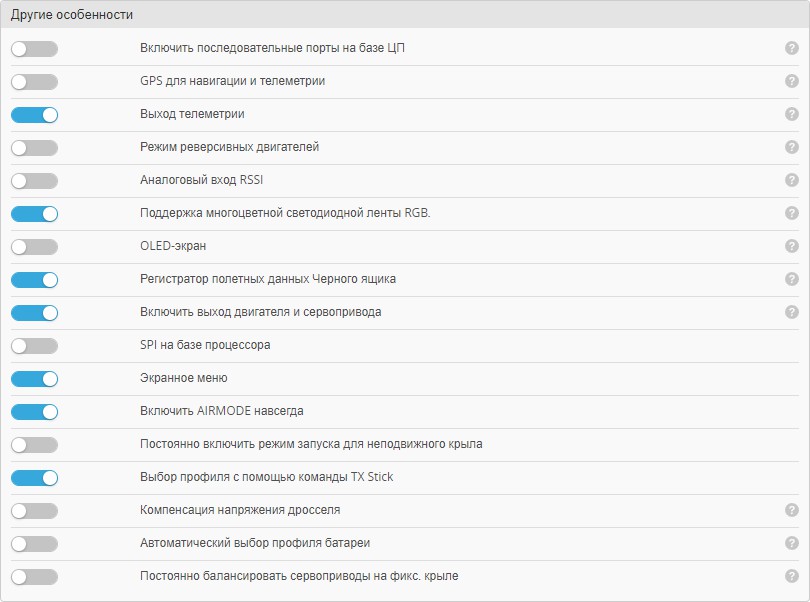
В разделе «Другие особенности» подключаются дополнительные функции. Например, «Выход телеметрии», «GPS для навигации и телеметрии» и т.д.
После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

Отказоустойчивость
Подробнее
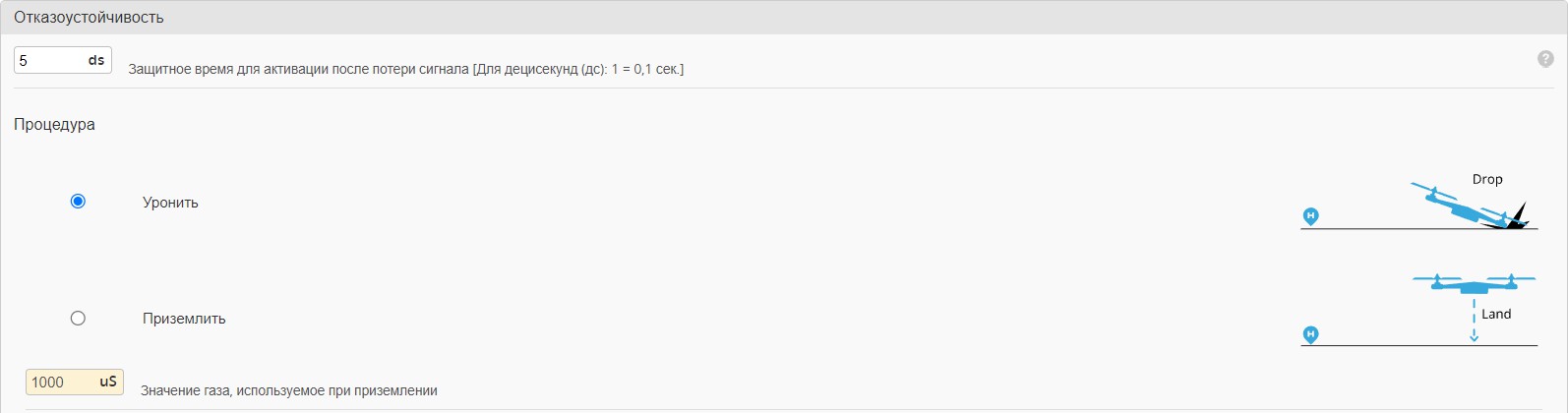
В данной вкладке определяется поведение дрона при возникновении внештатной ситуации.
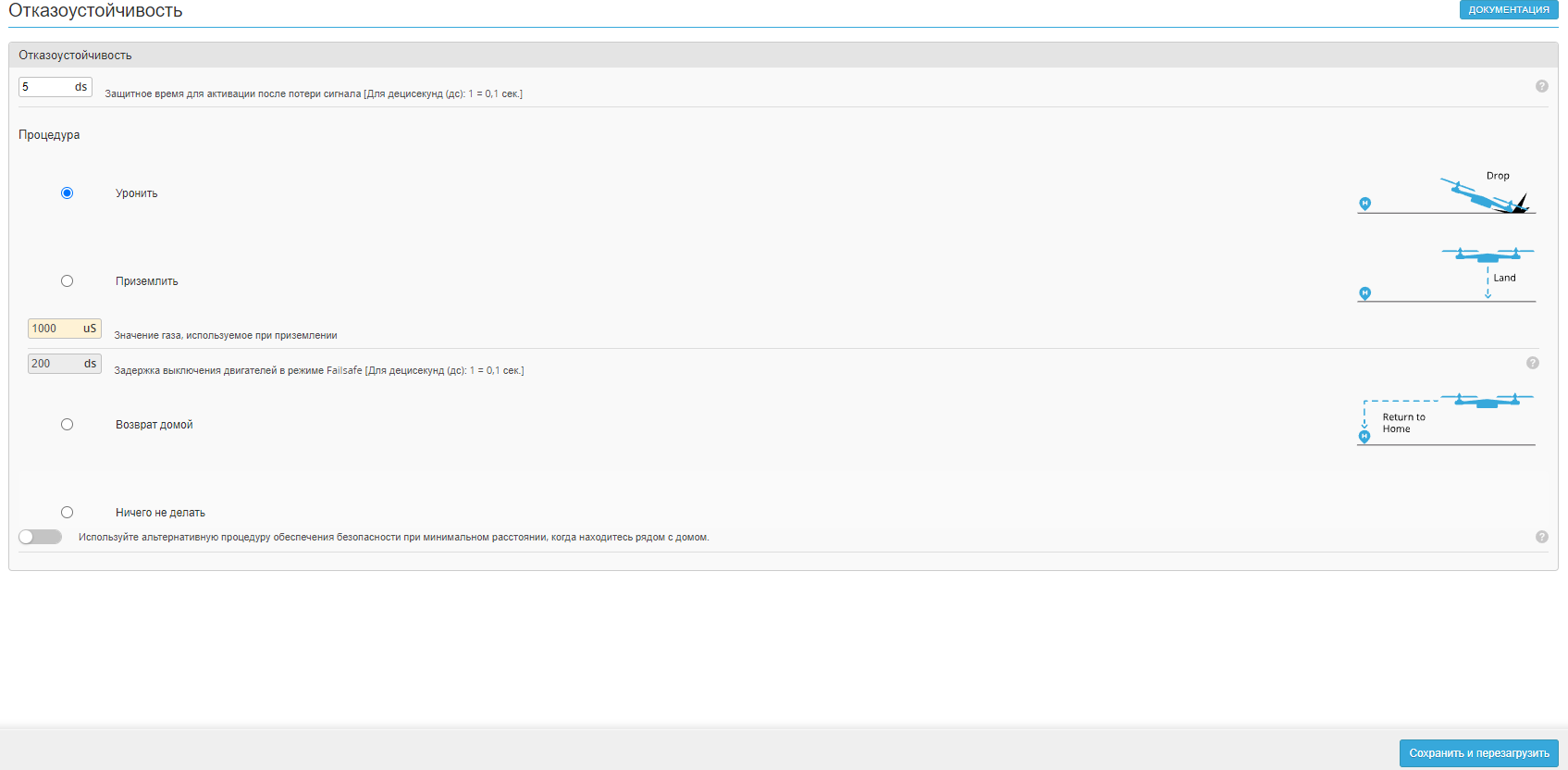
Вкладка определяет поведение воздушного судна в случае потери сигнала: через какое время активируется сценарий, что он из себя представляет ‒ приземление или падение, настройки сценария.
В нижнем разделе происходит настройка режима RTH (Return To Home) Возврата домой.

После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

Ускоренная настройка
Подробнее
Вкладка содержит экспериментальные функции автонастройки ПИД-регуляторов, фильтров, механики. Вместо того, чтобы устанавливать каждый ПИД-коэффициент и настройку фильтрации независимо, можно работать только с 7 ползунками. Ez Tune автоматически настроит все остальные настройки в соответствии с потребностями пользователя.
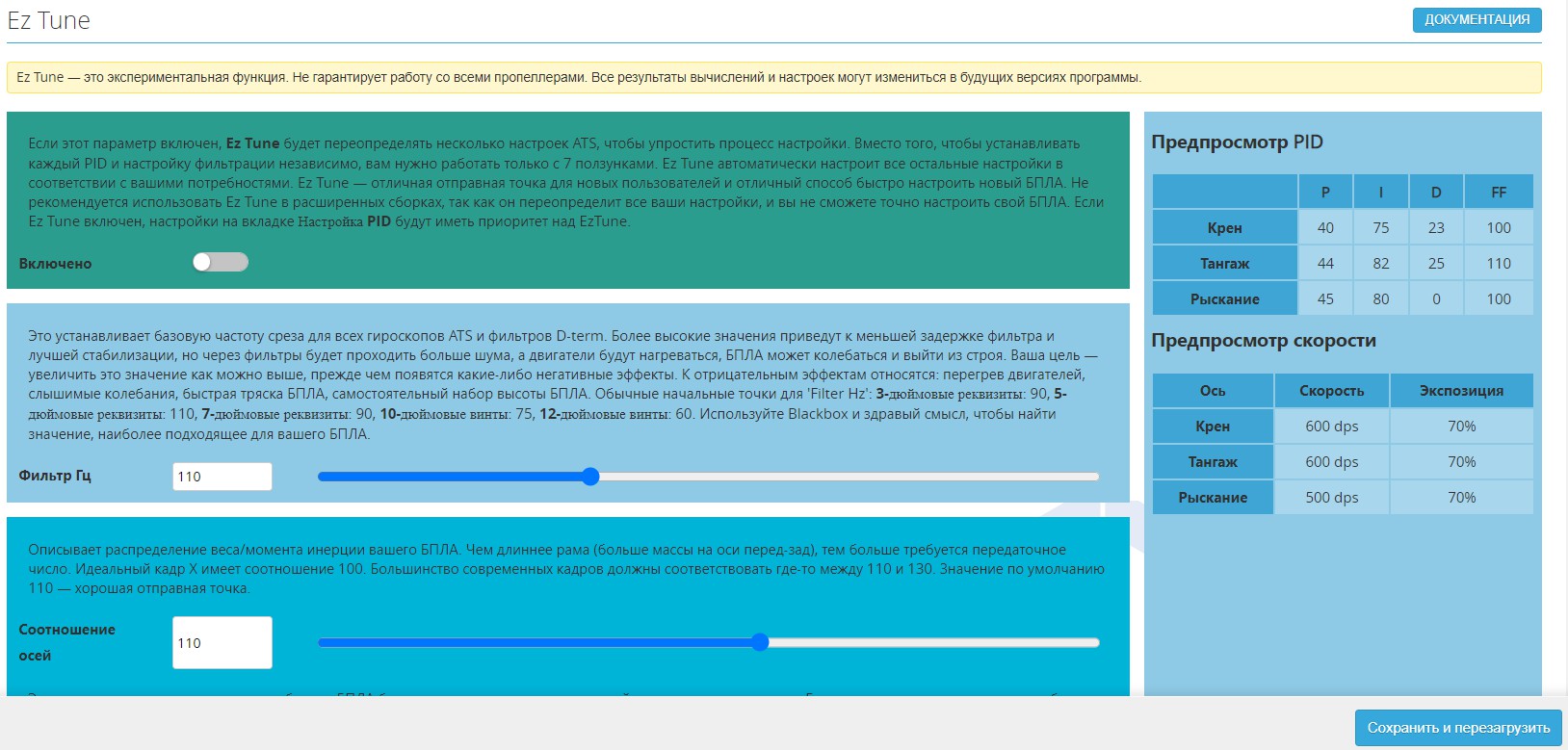
Обратите внимание, что если Ez Tune активирован, ПИД-настройка не будет доступна.
После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.
ПИД-настройка
Подробнее
ПИД ‒ это функция в полетном контроллере, являющаяся частью системы автоматического управления. Коэффициенты пропорциональной, интегральной и дифференциальной составляющих регулятора задают усиление, с которым система стремиться к заданному значению (например, угол наклона, высота, координаты).
ПИД-регулятор представляет собой замкнутую систему управления, которая пытается получить фактический результат ближе к желаемому результату, внеся коррективы в выходные данные, которые отправляются двигателям. Если происходит ошибка, она возвращается в начало и цикл повторяется.
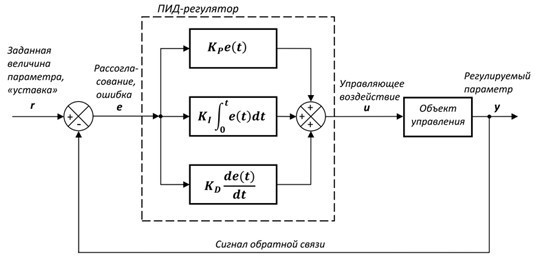
Во вкладке есть четыре раздела ‒ ПИД-усиление, Скорость и экспозиции, Фильтры и Механика.

Методы расчета коэффициентов ПИД-регуляторов
Ручная настройка
Самый распространенный метод настройки ПИД-регуляторов для беспилотных воздушных судов ‒ ручной или метод подбора.
В данном методе происходит фиксация логов (файлов с информацией о полете) со значениями ПИД-регуляторов во время работы системы. Далее происходит просмотр графиков и на их основе устанавливаются новые коэффициенты.
Данный метод позволяет осуществить довольно точную настройку под конкретного оператора, но занимает большое количество времени и требует терпения от настройщика.
Настройка часто производится исходя из реакции воздушного судна в полете.
Базовые реакции в поведении квадрокоптера на изменения ПИД-регуляторов:
P-компонента:
- низкий коэффициент: медленная реакция на движения стиком
- высокий коэффициент: высокочастотные осцилляции (заметны в динамике изменения П-компоненты; если в процессе увеличения коэффициента появляются колебания, стоит остановится).
I-компонента:
- низкий коэффициент: вялая и медленная реакция на движение стиком
- высокий коэффициент: амплитуда колебаний увеличивается
D-компонента:
- низкий коэффициент: колебания разного вида при изменении положения, связанные с P-компонентой
- высокий коэффициент: высокочастотные колебания Записывайте и просматривайте логи каждого полета. Можно провести группу испытательный полетов с небольшим шагом изменений, чтобы проверить, как ведут себя параметры в динамике.
Рекомендации по настройке:
- Отследите по логам полетов, какая компонента сильнее всего влияет на выходной сигнал, ее следует уменьшить. Если это П или Д коэффициент, попробуйте увеличить компенсирующий компонент. То есть, если П компонента создает колебания, следует увеличить Д для компенсации. В обратном случае, увеличивается П;
- Графики П и Д могут отличаться по фазе, важно определить, какой из них отстает от другого. Попробуйте увеличить «отстающий» коэффициент;
- Ведите таблицу использованных настроек, отмечайте положительные результаты и анализируйте, какие действия привели к тому или иному результату;
- Сначала добейтесь стабильного зависания квадрокоптера в статическом полете, после к испытаниям следует добавить резкие перемены высоты и препятствия;
- Если долгое время не удается сбалансировать ПИД-регуляторы, попробуйте взять предустановленные настройки конфигуратора или производителя;
- В случае неудачи с предустановленными настройками, сбросьте коэффициенты и начните подбор с нуля;
- Подбор коэффициентов с нуля:
- Постепенное увеличение коэффициента П до появления высокочастотных колебаний;
- Настройка коэффициента Д до компенсации осцилляций;
- Подбор I до удовлетворяющего результата.
Анализ графиков:
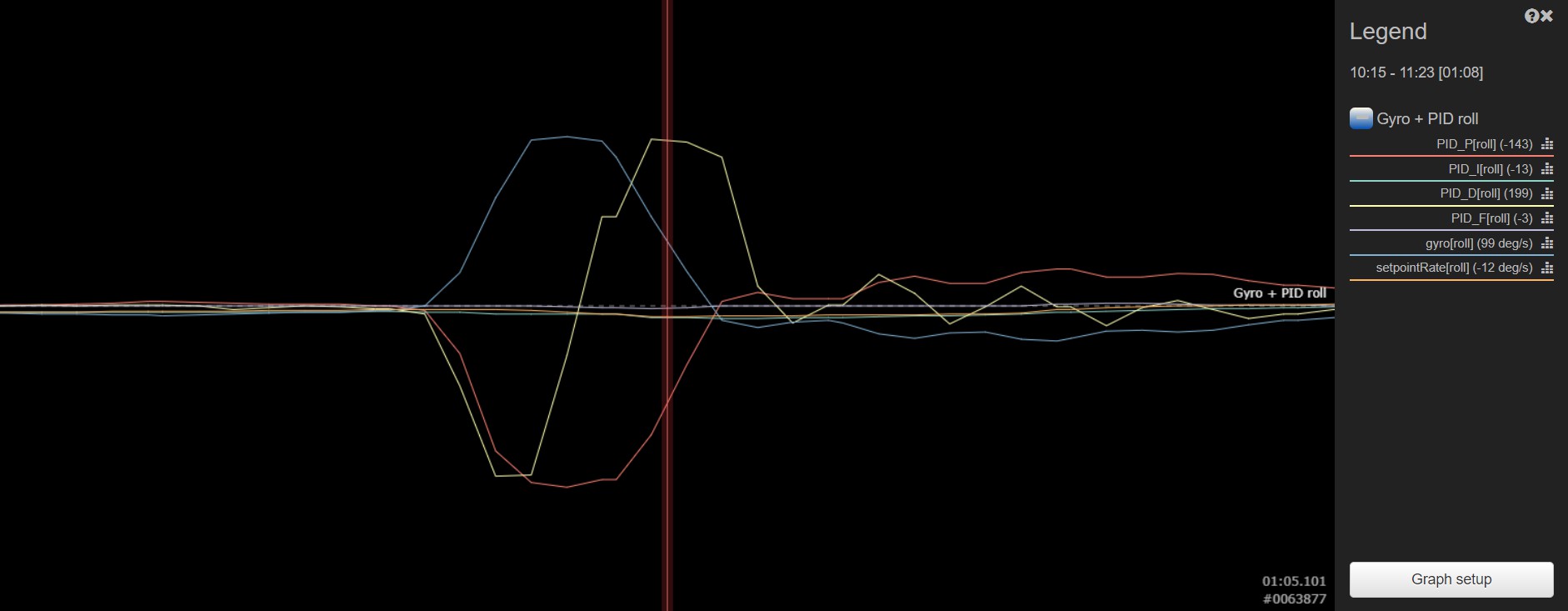
Что необходимо смотреть на графиках:
- Взаимодействие П и Д компонент, они должны друг друга компенсировать, работать в противофазе
- Как ведет себя график выходного сигнала относительно заданного значения (setpoint)


- Какой из параметров сильнее воздействует на выходной сигнал
Метод Циглера-Никольса или Тангенциальный метод
В данном методе настройка начинается с нулевых коэффициентов. Коэффициент П добавляется до тех пор, пока система не выйдет за пределы устойчивости и возникновения незатухающих колебаний. В данном состоянии фиксируется значение П-регулятора, амплитуда и период колебаний. Коэффициенты вычисляются по следующим формулам:

где K ‒ коэффициент П-регулятора,
Ti ‒ коэффициент И-регулятора,
Td ‒ коэффициент Д-регулятора,
a ‒ амплитуда колебаний,
L ‒ период колебаний.
Такой метод прост в реализации, но не точен и имеет обобщенные результаты.
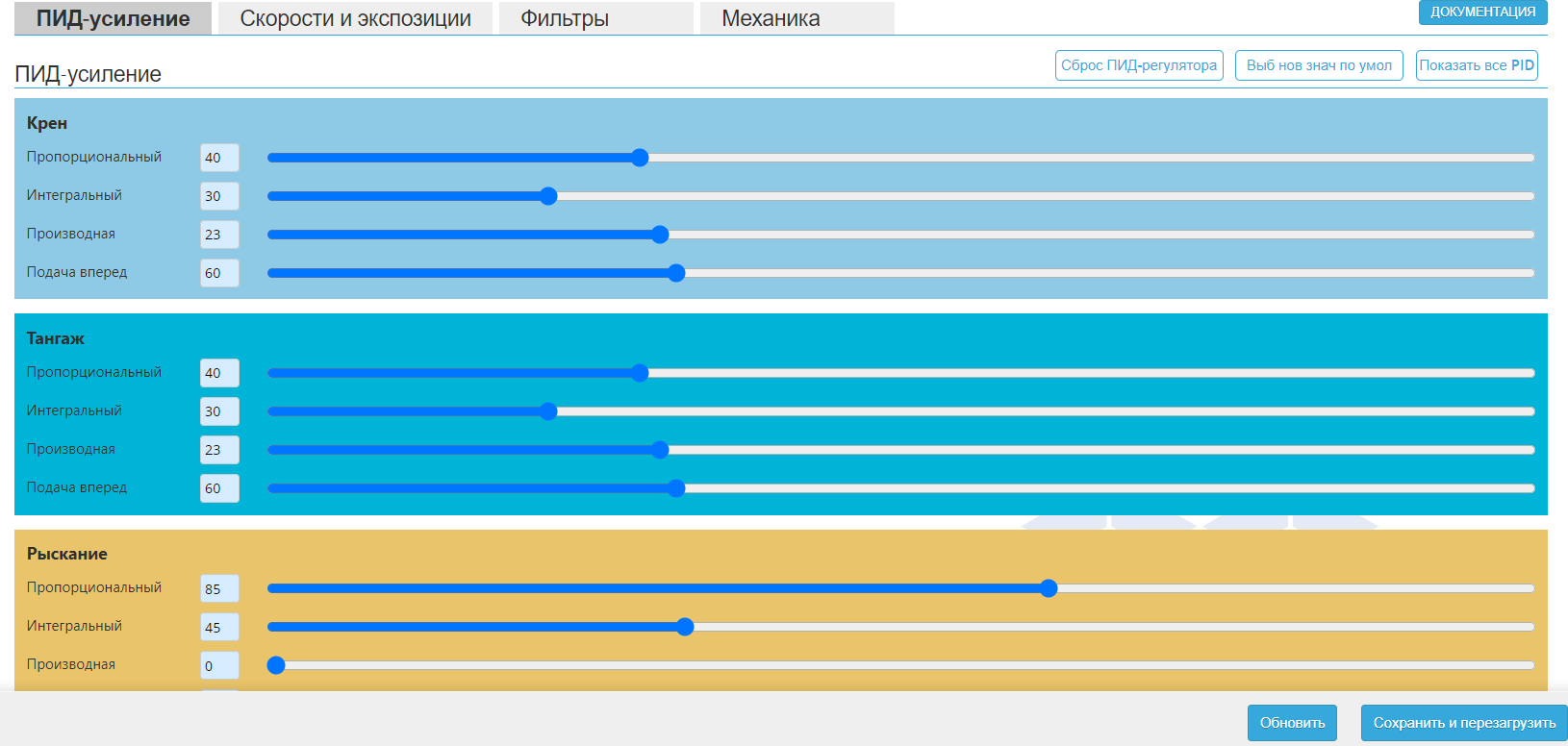
ПИД-усиление
В разделе ПИД-усиление настраиваются коэффициенты каждого из регуляторов по осям: крен, тангаж и рыскание. Для каждой оси доступно 4 регулятора: Пропорциональный, Интегральный, Производныйи Подача вперед (Feed Forward).



Верхние ползунки действительны для режима ANGLE.
Чтобы настроить ПИД-регуляторы навигационных режимов, необходимо активировать «Показать все PID» и «Показать усовершенствованные ПИД-регуляторы», станет доступна таблица со значениями коэффициентов.


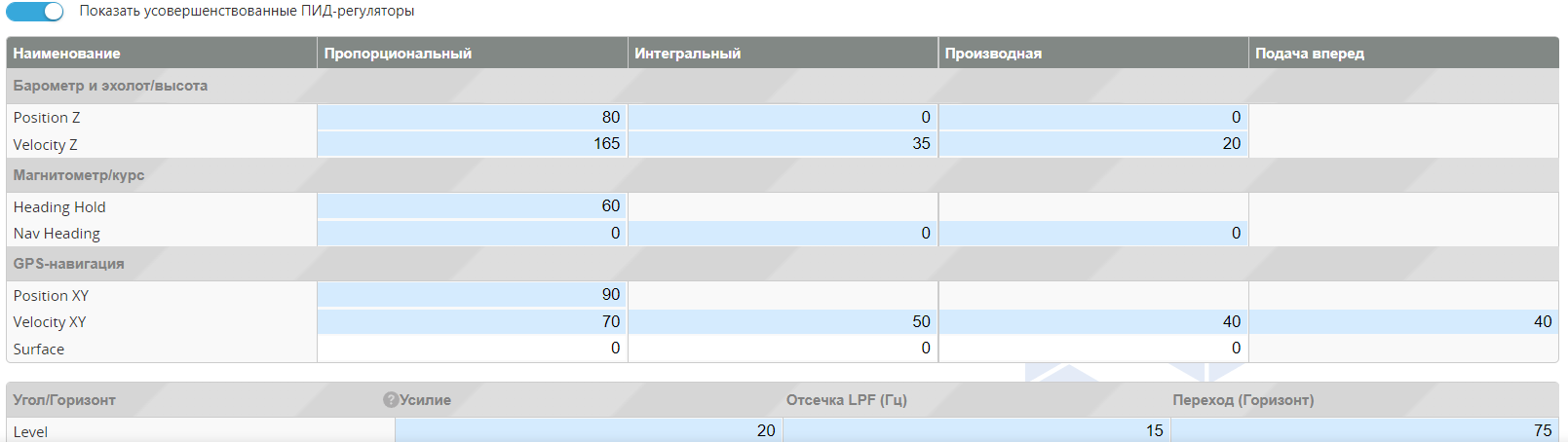
«Барометр и эхолот/высота» соответствуют режиму удержания высоты AltHold. Для него доступны П-регулятор по позиции оси Z и ПИД-регулятор по скорости оси Z.

«Магнитометр/курс» соответствует режиму удержания курса Heading Hold. Для него доступны П-регулятор по позиции рыскания и ПИД-регулятор по скорости рыскания.

«GPS-навигация» соответствует режиму удержания позиции PosHold. Для него доступны П-регулятор по позиции осей XY и ПИД-регулятор по скорости осей XY. Также здесь происходит настройка ПИД-регулятора режима следования по поверхности Surface.

«Угол/Горизонт» включает в себя дополнительные настройки режимов стабилизации ANGLE и HORIZON. Подробнее про режимы полета в разделе «Режимы (Modes)».

После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

Скорости и экспозиции
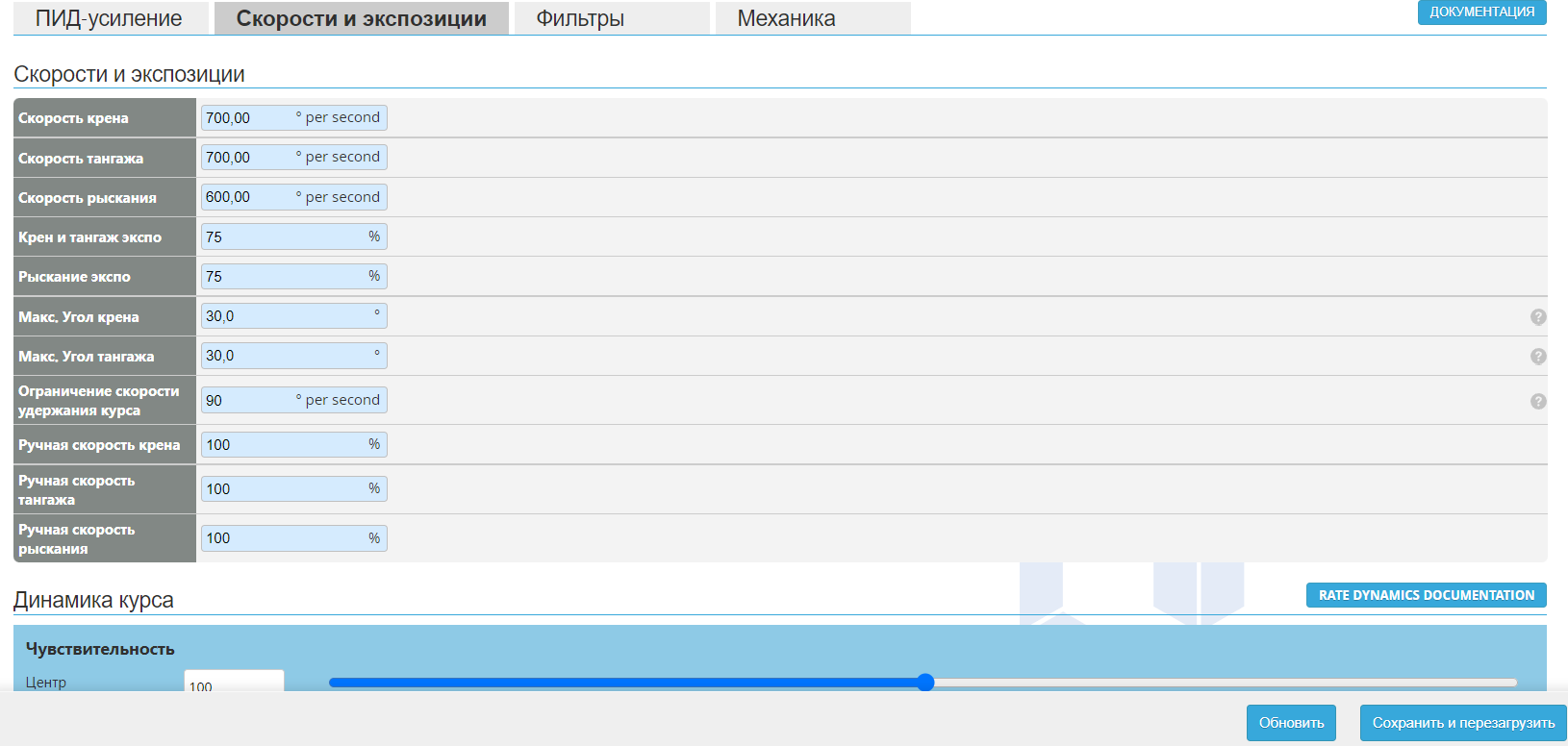
В данном разделе происходит настройка скоростей вращения по осям ‒ их часто называют рэйтами (rate ‒ скорость), а также экспозиции ‒ экспо (expo).
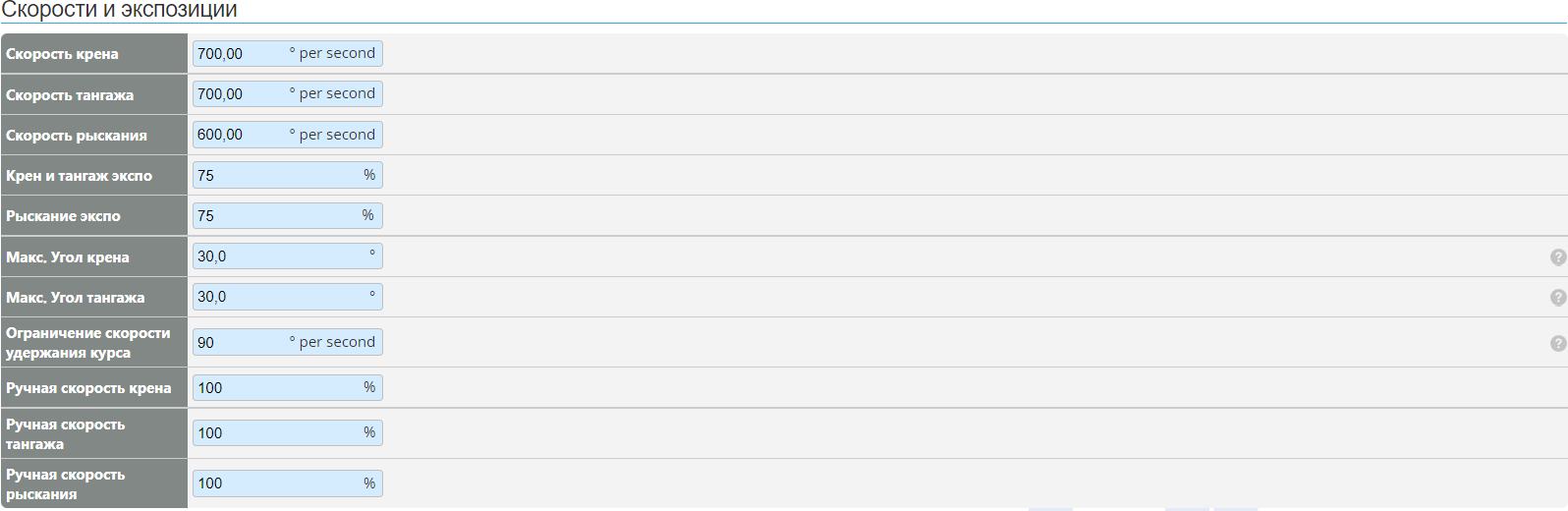
Экспо сглаживает кривую между центральным и крайним положением стика управления. Чтобы добиться более линейной скорости, установите Экспо на низком уровне. Для более широкой области центрального стика с более точным управлением увеличьте Экспо. Помните, что увеличение Экспо также снижает чувствительность центрального положения.
Экспо может достигать 100, но слишком высокое значение может привести к снижению чувствительности центрального положения стика и сделать реакцию дрона более непредсказуемой на крайнем положении (более дерганой).
Динамика курса ‒ это модификатор чувствительности стика. Данный модификатор позволяет пилоту настраивать характеристики входного управления. Принцип работы схож с ПИД-регулятором, но для RC Command, то есть для радиосигнала управления.
«Чувствительность» усиливает или сужает показатели, что добавляет воздушному судну этой самой чувствительности. Значение по умолчанию 100 ни на что не влияет, значение 120 увеличивает ваши показатели на 1.2, а значение 80 уменьшает ваши показатели на значение 0.8.

«Коррекция» ‒ это значение, которое со временем исправит повышение или понижение скоростей, вызванное чувствительностью воздушного судна. Чем выше коррекция, тем быстрее она исправит повышение или понижение скорости.

Настройка «Масса» добавляет «веса» к заданному значению, как будто сам пилот добавляет на стик. Значение 0 ничего не делает, а значение 50 применяет 50% изменения значений. Это сглаживает управляющий сигнал, но большие значения добавляют задержку.

После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

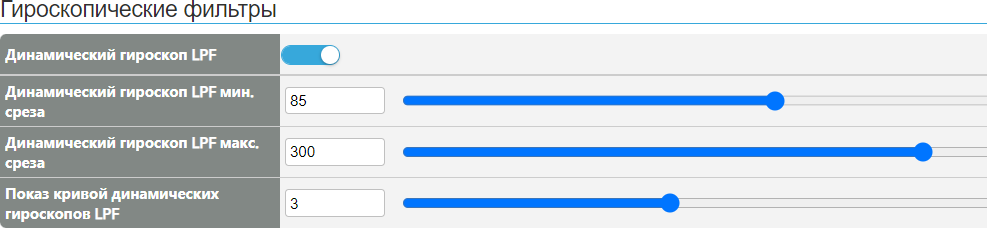
Фильтры
Во время работы беспилотного воздушного судна возникают высокочастотные колебания ‒ шумы ‒ мешающие стабильной работе системы. Для того, чтобы их подавить на сигнал накладываются фильтры.
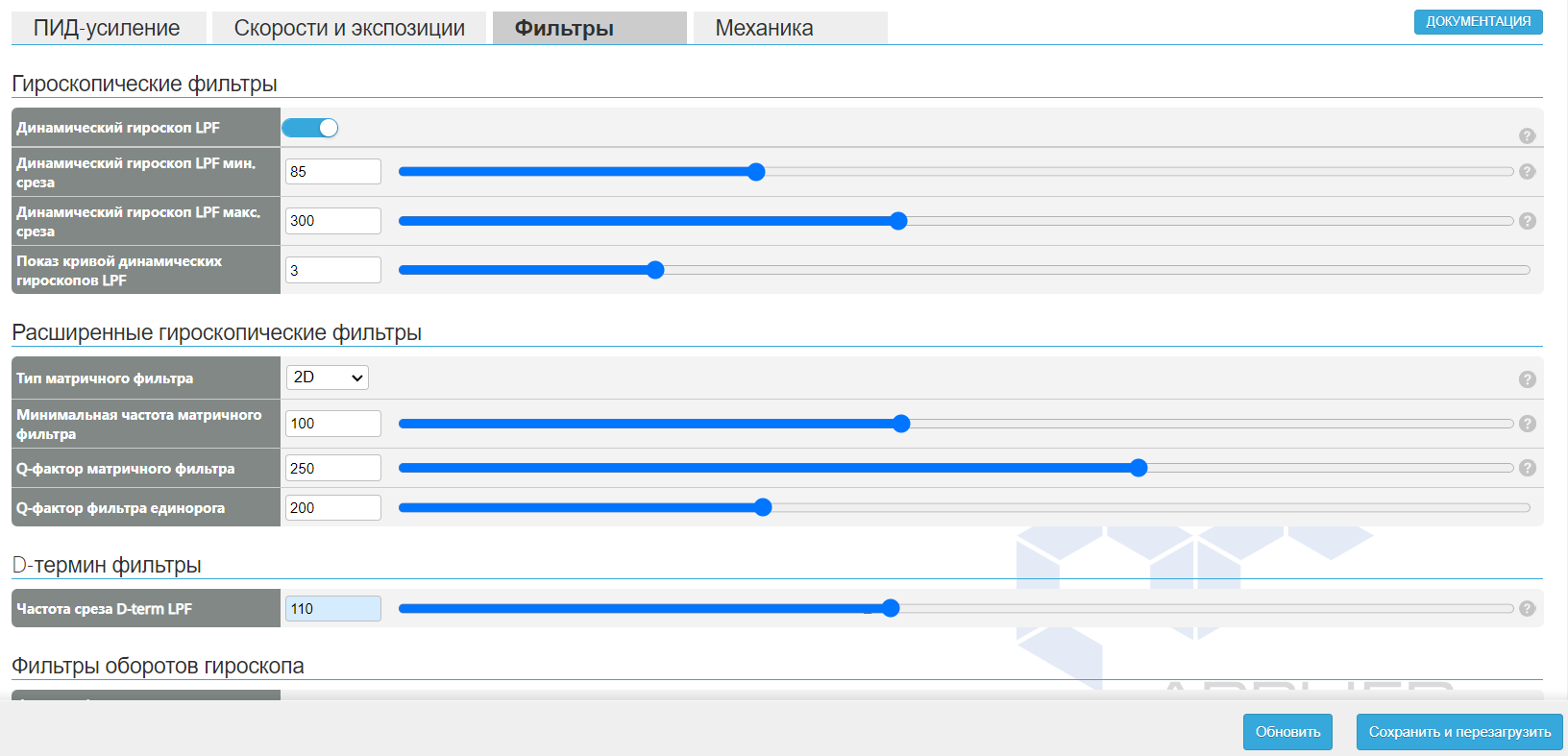
Виды фильтров и их принцип работы:
Notch-filter ‒ он же режекторный и заградительный.
Принцип работы: фильтр не пропускает колебания определенной полосы частот и пропускает все, выходящие за пределы.

Матричные фильтры так называются, потому что содержат в себе сразу матрицу из нескольких фильтров: фильтры ставятся на одной частоте по всем осям. Например 2D фильтр устанавливается на оси крен и тангаж для гироскопа.
dynamic_notch_filter улавливает изменения в частоте пика шума и фиксирует на нём фильтр
LPF (Low-pass filter)/фильтр низких частот
Low-pass filter ‒ фильтр низких частот
Принцип работы: фильтр не пропускает все частоты выше заданной и пропускает все ниже.

RPM-filter (rotations per minute)/фильтр шумов мотора
Relations per minute filter ‒ фильтр шумов от мотора.
Принцип работы: алгоритм отслеживает скорость вращения двигателей, после чего устанавливает набор режекторных фильтров на этой частоте.

Существуют также комплементарные фильтры ‒ фильтры, использующие выходы двух и более датчиков, установленных на аппарате, и выводящие из них один общий сигнал.
Фильтрация осуществляется за счет увеличения коэффициента веса значения, приходящего с какого-либо датчика, в расчете единого сигнала управления. То есть, данные с меньшим коэффициентом имеют меньшее воздействие на конечный результат расчетов.
Фильтр Калмана ‒ это алгоритм, позволяющий предугадывать значения, приходящие в полетный контроллер и на их основе усреднять общий сигнал. В Конфигураторе он называется фильтром единорога из-за своей специфичной амплитудно-частотной характеристики.

После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

Механика
В разделе доступна настройка для ПИД-составляющих.
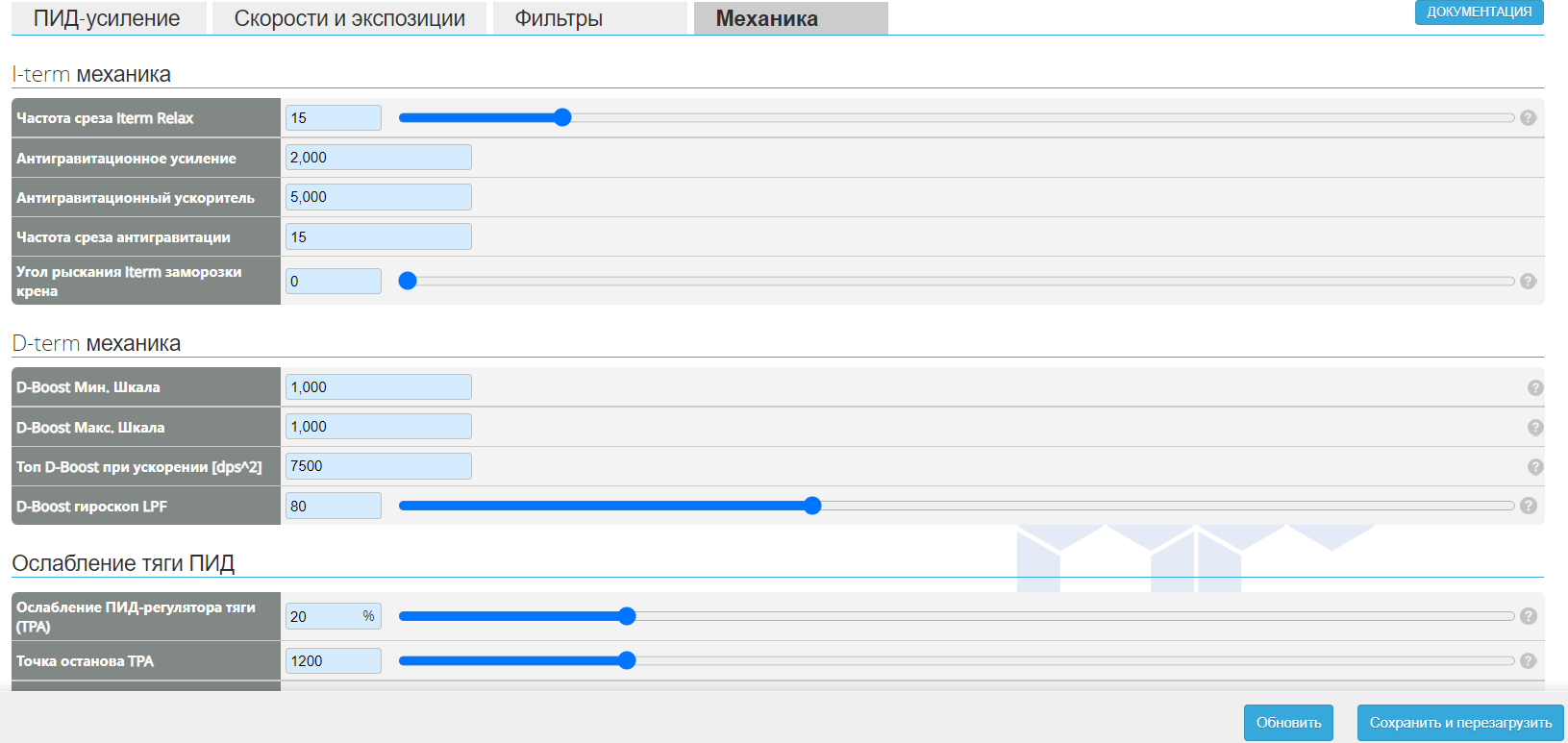
Для I-term (интегральной составляющей) ‒ доступна частота среза, то есть, фильтрация, в каком диапазоне будет работать подавление I-составляющей. Антигравитационные настройки позволяют устранить проблему наклона носа воздушного судна при резком изменении газа.
Антигравитация кратковременно увеличивает I-составляющую во время резкой перегазовки, чтобы БВС сохранил устойчивое положение. Частота среза также определяет диапазон работы антигравитационных настроек.

D-boost представляет из себя дополнительное увеличение D-составляющей при воздействии на БВС внешних факторов. Максимальное значение добавляется при внешних воздействиях, минимальное ‒ при быстром движении пилотом ручки управления. Низкие значения приводят к резкой реакции на изменение сигнала, высокие значения ‒ более плавную реакцию.

Далее идет настройка TPA. TPA (Throttle PID Attenuation) - ослабление ПИД-регулятора дросселя (газа). Настраивается при возникновении колебаний при увеличении значения газа. Начиная с установленного значения (точка останова) действие ПИД-регуляторов будет ослабевать.

Например: Значение TPA 50% и точка начала колебаний 1500 (диапазон газа 1000-2000). Когда газ достигнет отметку 1500 ПИД-регуляторы начнут ослабляться. К значению 1750 ПИД-регуляторы уменьшаться на 25%. То есть, если изначально P был равен 100, то к 1750 он станет 75. Как только газ достигнет максимального значения 2000, ПИД-регуляторы будут ослабляться на установленные 50%.
Постоянная времени применяется для самолетов и отражает не мгновенную реакцию воздушного судна.
Триммер уровня крыла учитывает угол установки крыла.

После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

Расширенная настройка
Подробнее
Вкладка «Расширенная настройка» позволяет подробно настроить навигационные режимы для конкретного типа воздушного судна.
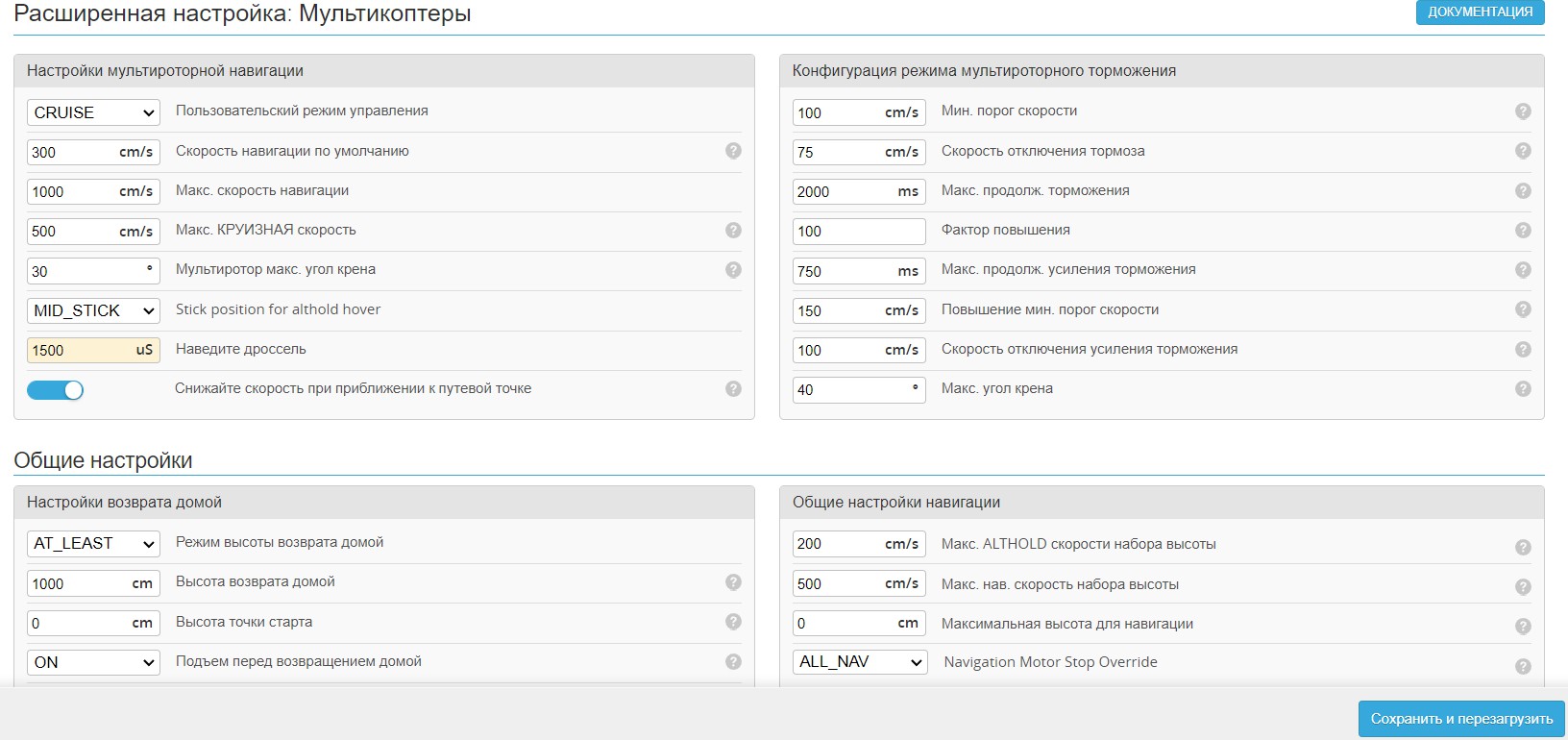
Вкладка имеет разделы: Настройки мультироторной навигации, Конфигурация режима мультироторного торможения, Настройки режима возврата домой, Общие настройки навигации, Настройки навигации по маршрутным точкам, Автоматические настройки приземления.
Настройки мультироторной навигации.
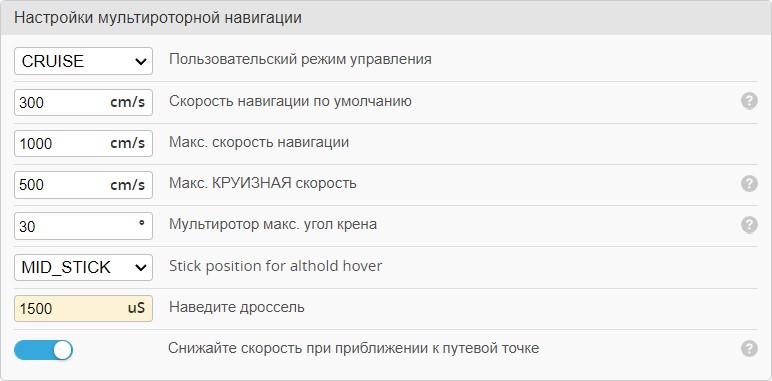
Пользовательский режим ‒ CRUISE управляет тангажом и креном по скорости, ATTI управляет по положению.
Скорость навигации по умолчанию ‒ скорость перемещения во всех автономных режимах (перемещение по точкам и возврат домой).
Максимальная скорость навигации ‒ максимальная допустимая скорость в автономных полетах.
Максимальная круизная скорость ‒ максимальная скорость для режима PosHold/CRUISE.
Максимальный угол крена мультиротора ‒ максимальный угол крена в навигационном режиме.
Stick position for althold hover ‒ позиция стика для удержания высоты, например, при выборе STICK нейтральной точкой зависания будет положение стика, в котором включили AltHold. MID_STICK и HOVER ‒ точка зависания в центральном положении стика.
Наведите дроссель ‒ значение зависания воздушного судна.
Снижайте скорость при приближении к путевой точке ‒ активирует торможение перед маршрутной точкой.
Конфигурация режима мультироторного торможения.
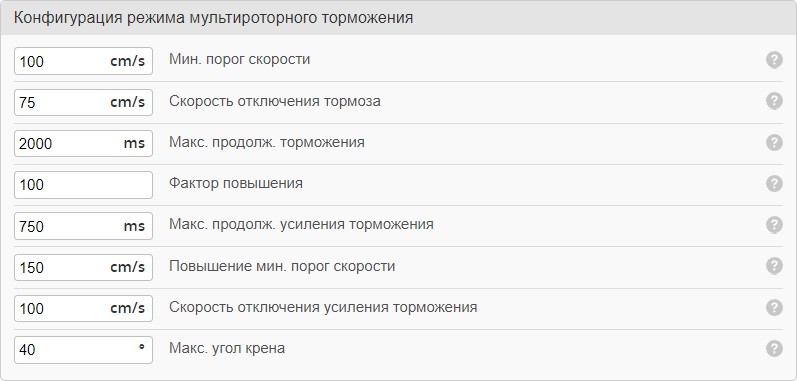
Минимальный порог скорости ‒ минимальная скорость, с которой начинается торможение. Например, воздушное судно начнет тормозить, когда достигнет 100 см/с.
Скорость отключения торможения ‒ скорость, когда торможение остановится. Например, воздушное судно перестанет тормозить, когда достигнет 75 см/с.
Максимальная продолжительность торможения ‒ мера безопасности, максимальная продолжительность торможения.
Фактор повышения ‒ значение на которое усилиться торможение. 100% означает, что навигационный аппарат удвоить скорость крена и ускорения для торможения.
Максимальная продолжительность усиления торможения максимальное время, которое может длиться усиление торможения.
Повышение минимального порога скорости ‒ скорость, при которой активируется усиление торможения.
Скорость отключения усиления торможения ‒ скорость, при которой усиление торможения отключиться.
Максимальный угол крена ‒ максимальный угол крена при режиме торможения.
Настройки режима возврата домой (RTH)
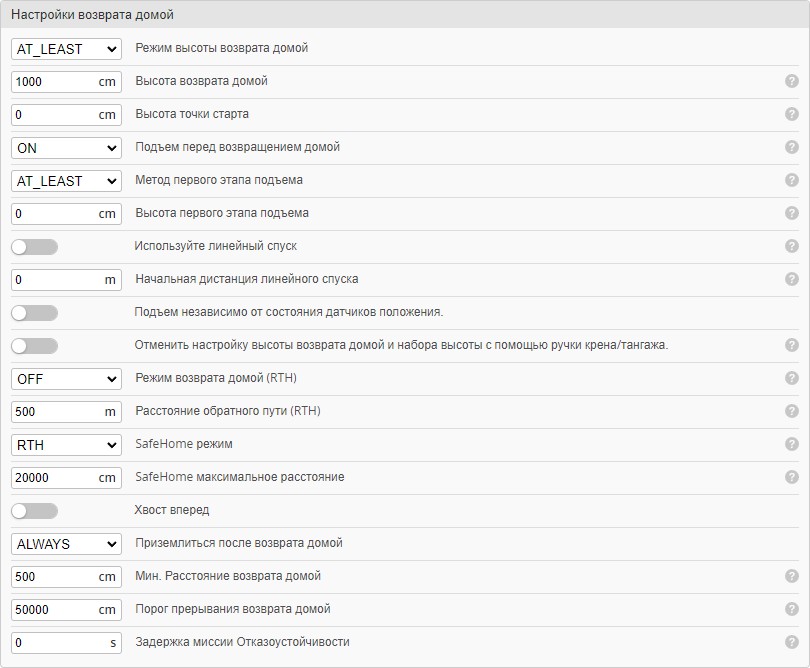
Режим высоты возврата домой ‒ AT_LEAST, CURRENT, EXTRA, FIXED, MAX.
Высота возврата домой ‒ значение, которое будет удерживаться в режимах FIXED, AT_LEAST, EXTRA.
Высота точки старта ‒ высота домашней точки, если посадка будет происходить не в точке старта.
Подъем перед возвращением домой ‒ если будет активно ON или ON_FW_SPIRAL для самолетов, перед началом возврата домой воздушное судно поднимается на высоту возврата домой. Если будет активирован режим OFF, судно наберет или сбросит высоту по дороге.
Метод первого этапа подъема ‒ как происходит подъем перед возвращением домой.
Высота первого этапа подъема ‒ какая высота достигается после подъема.
Используйте линейный спуск ‒ при активации данной функции на протяжении всего возврата домой судно будет медленно снижаться.
Начальная дистанция линейного спуска ‒ расстояние от начальной точки до активации линейного спуска.
Подъем независимо от состояния датчиков положения ‒ подъем будет произведен даже при отключении датчиков положения (оптический поток, GPS и т.д.).
Отменить настройку высоты возврата домой и набора высоты с помощью ручки крена/тангажа ‒ при активации данного режима подъем перед возвратом домой можно деактивировать с помощью ручки тангажа или крена.
Режим возврата домой (RTH) ‒ в данном режиме воздушное судно вернется по уже пройденному маршруту, после чего активируется режим возврата домой. FS ‒ режим возврата домой по отказоустойчивости.
Расстояние обратного пути (RTH) ‒ расстояние, после которого активируется режим возврата домой.
SafeHome режим ‒ определяет при каком режиме будет происходить сохранение точки старта.
SafeHome максимальное расстояние ‒ на расстоянии большего установленного SafeHome работать не будет.
Хвост вперед ‒ воздушное судно будет возвращаться хвостовой частью вперед.
Приземлиться после возврата домой.
Минимальное расстояние возврата домой ‒ если воздушное судно находится на расстоянии меньшем, чем это, будет выполнена посадка без возврата домой.
Порог прерывания возврата домой ‒ если воздушное судно в режиме возврата домой удаляется от точки посадки, при достижении установленного порога воздушное судно перейдет в режим аварийной посадки.
Задержка миссии Отказоустойчивости определяет продолжительность ожидания системы стабилизации для проверки включения режима возврата домой.
Общие настройки навигации.
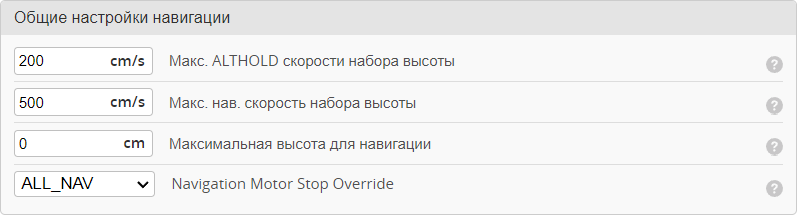
Максимальная скорость набора высоты AltHold ‒ максимально допустимая вертикальная скорость набора высоты для режима удержания высоты.
Максимальная навигационная скорость набора высоты максимальная вертикальная скорость набора высоты для навигационных режимов.
Максимальная высота для навигации ‒ максимальная высота подъема для навигационных режимов. 0 ‒ ограничение не активно.
Navigation Motor Stop Override ‒ определяет управление моторами в навигационных режимах. При ALL_NAV навигационная система полность возьмет на себя управление двигателями, не позволит ему остановиться даже на низком уровне газа. При OFF_ALWAYS навигационная система не будет управлять моторами даже в режиме отказоустойчивости. При OFF на низких оборотах двигатель остановится. При AUTO_ONLY навигационная система будет управлять моторами только в автономных навигационных режимах следования по маршрутным точкам NAV WayPoint и возвращения домой NAV RTH.
Настройки навигации по маршрутным точкам.
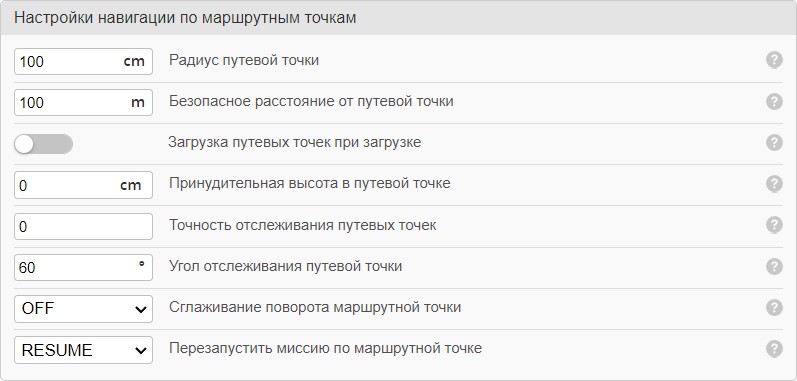
Радиус путевой точки ‒ расстояние до путевой точки, после которого считается, что точка пройдена.
Безопасное расстояние от путевой точки ‒ максимальное расстояние между домашней точкой и первой путевой точкой.
Загрузка путевых точек при загрузке ‒
Принудительная высота в путевой точке ‒ высота, которая должна быть достигнута перед переходом к следующей путевой точке. 0 ‒ функция неактивна.
Точность отслеживания путевых точек ‒ насколько точно воздушное судно следует маршруту. Более низкие значения обеспечивают более высокую точность, но могут приводить к вибрациям. Оптимально ‒ 6. Диапазон от 0 до 10.
Угол отслеживания путевой точки ‒ угол приближения воздушного судна к путевой точке. Более низкие значения удлиняют подход, а высокие значения могут вызвать перерегулирование. Оптимально ‒ 60. Диапазон от 30 до 80.
Сглаживание поворота маршрутной точки ‒ режим активирует сглаживание поворотов при прохождении путевой точки. Если активирован ON, воздушное судно пройдет путевую точку. Если активирован ON-CUT, воздушное судно срежет угол.
Перезапустить миссию по маршрутной точке ‒ режимы определяют поведение воздушного судно в случае, если миссия прервана.
Автоматические настройки приземления.
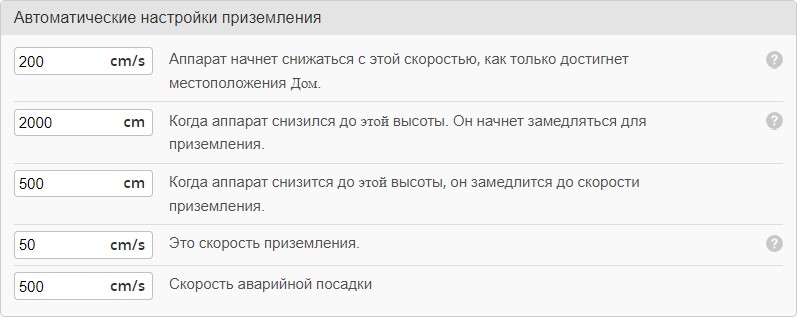
Скорость снижения ‒ воздушное судно начнет снижаться с этой скоростью, как только достигнет местоположения «Дом».
Высота замедления ‒ когда воздушное судно снизится до этой высоты, оно начнет замедляться для приземления.
Высота приземления ‒ когда воздушное судно снизится до этой высоты, оно замедлится до скорости приземления.
Скорость приземления
Скорость аварийной посадки
После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.
Программирование
Подробнее
Вкладка «Программирование» дает возможность создания пользовательских настроек в Конфигураторе.
Логические условия могут быть основаны на таких вещах, как значения каналов пульта управления, переключатели, высота, расстояние, таймеры и т. д.
Вкладка имеет 2 раздела: «Logic Condition» и «PID Controllers». «Logic Condition» позволяет устанавливать режимы в соответствии с достигнутыми значениями. «PID Controllers» реализует тот же принцип в отношении ПИД-контроллеров.
Платформа программирования включает:
Логические условия ‒ каждое логическое условие может быть понято как отдельная команда, отдельная строка кода
Глобальные переменные ‒ переменные, которые могут хранить значения из логических условий и сервомикшера и для них (GVAR).
Программирование PID-контроллеров общего назначения, настраиваемых пользователем
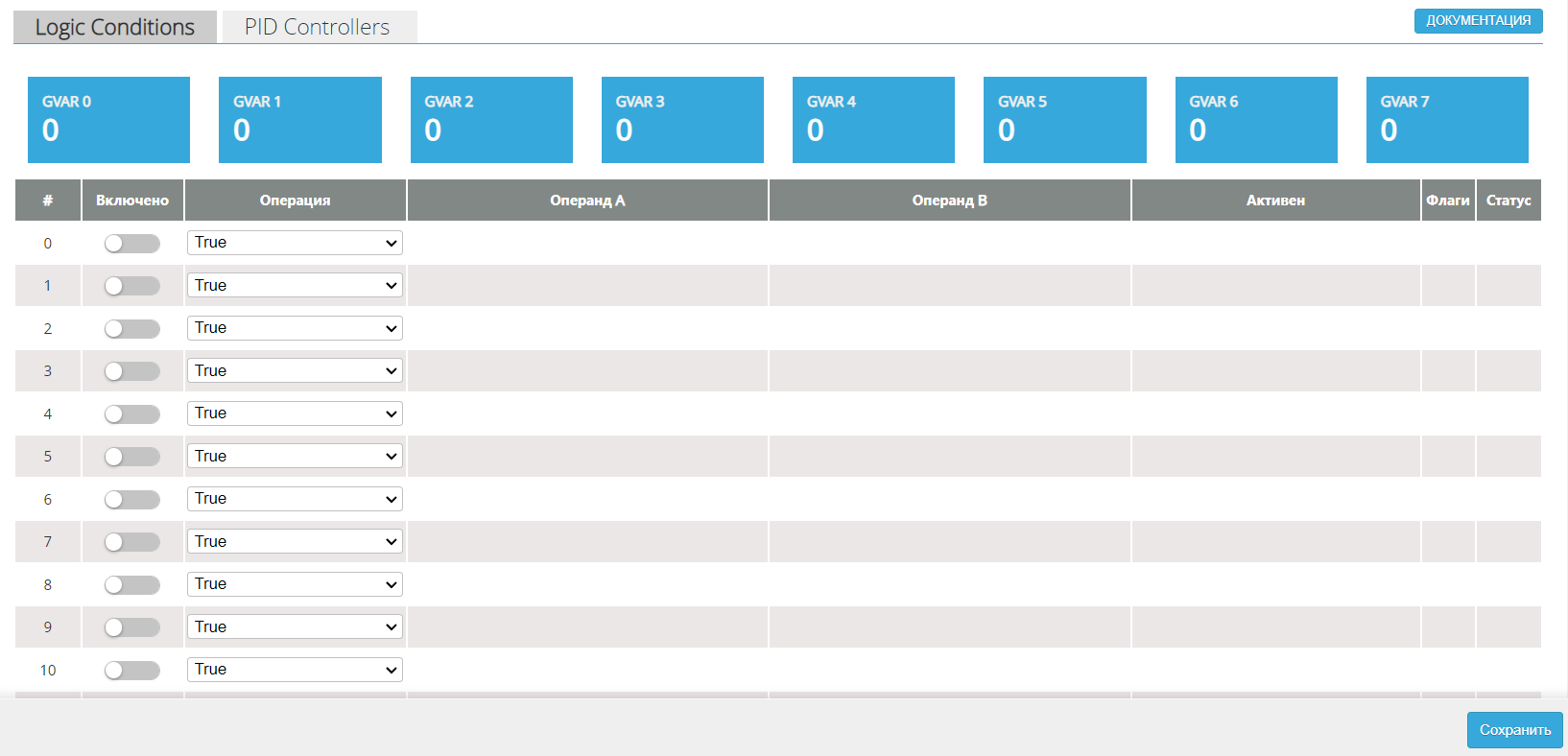
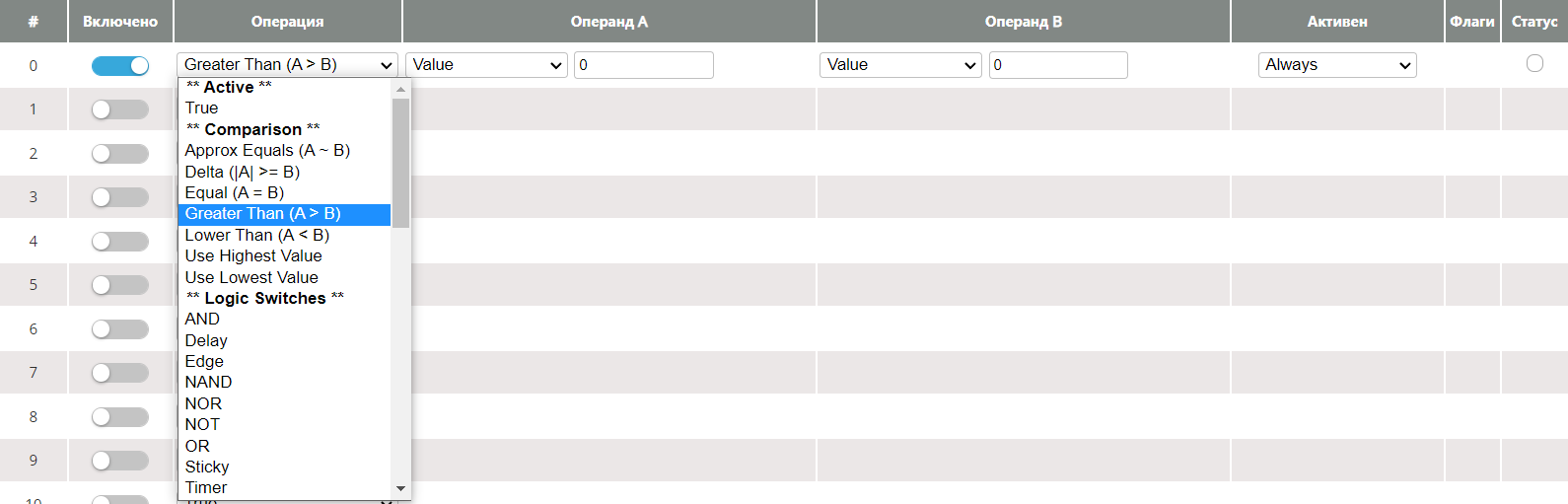
Logic Condition
Здесь доступна таблица из 8 столбцов.

# ‒ номер строки;
Включено ‒ ползунок активации строки;
Операция ‒ выполняемая операция. Например, Greater Than (A>B) сравнивает значения Операнда A и Операнда B и в случае, если Операнд A больше Операнда B, активирует установленное условие;
Операнд ‒ это аргумент операции, обрабатываемые в ней данные.
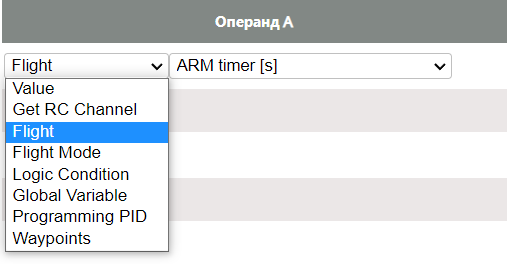
Операнд A ‒ какой параметр будет отслеживаться;
Операнд B ‒ значение параметра;
Активен ‒ когда активно условие. Либо «Always» ‒ всегда, либо когда активно другое логическое условие.
Флаги ‒ предупреждения об ошибках. Сбрасываются после активации или деактивации «ARM».
Статус ‒ выполняется ли условие. Значок прозрачный, если условие не выполняется, значок синий, если условие выполняется.
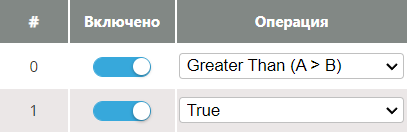
В качества примера запрограммируем полетный контроллер так, чтобы отменить проверки постановки на охрану на предмет уровня, не безопасной навигации, не откалиброванного компаса и некоторых аппаратных сбоев при скорости дрона более 10 м/с. Полезно, например, если воздушное судно застряло в дереве.
- Активируйте нулевую строку, теперь она участвует в работе полетного контроллера;

- В Операция выберите логическое, математическое или любое другое доступное условие проверки;
- В Операнд A и в Операнд B занесите сравниваемые величины. В нашем случае сравниваем, что скорость относительно земли (ground speed) больше 1000 см/с;
- Во вкладке Активен устанавливается условие, когда данная операция
выполняется;

- Активируйте первую строку;
- В качестве Операции выберите действие или условие, в нашем случае Override Arming Safety;
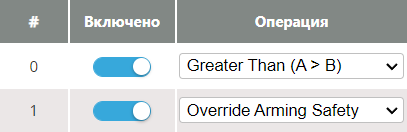
- В Активен выставите Logic Codition 0. Это значит что при срабатывании условия из нулевой строки выполнится действие из первой строки;

- Сохраните, иначе данный код не вступит в силу.

В столбце Status отображается выполнение условий, например, сейчас дрон имеет скорость 0 см/с и поэтому нулевое условие имеет результат False, следовательно первое условие тоже. Как только скорость будет выше 1000 см/с условия примут значение True, а Status окрасится в синий цвет.
После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

PID Controllers
PID Controllers реализует те же функции, что и Logic Conditions, но основываясь на ПИД-регуляторах.
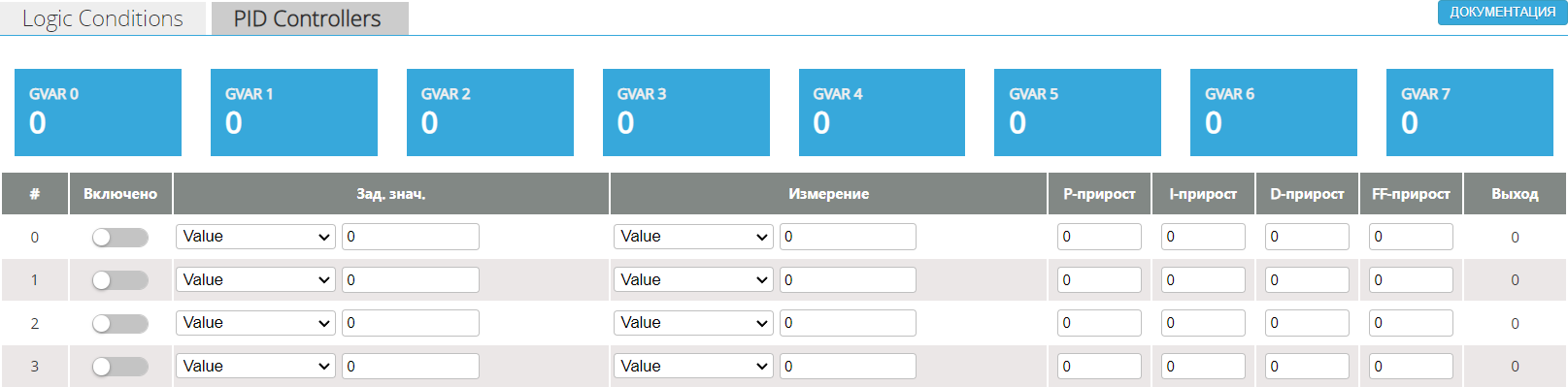
- Активируйте нулевую строку, теперь она участвует в работе полетного контроллера;

- В Заданном значении выберите параметр;

- В Измерении назначьте значение параметра;

- Далее установите прирост ПИД-составляющих. Выход будет рассчитываться автоматически.

Теперь полетный контроллер настроен так, что при установлении значения 1 канала пульта (крен) 1400 каждый ПИД-коэффициент увеличивается на 4 единицы.
После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.
Приемник
Подробнее
Вкладка Приемник позволяет настраивать управляющий сигнал, приходящий с приемника.
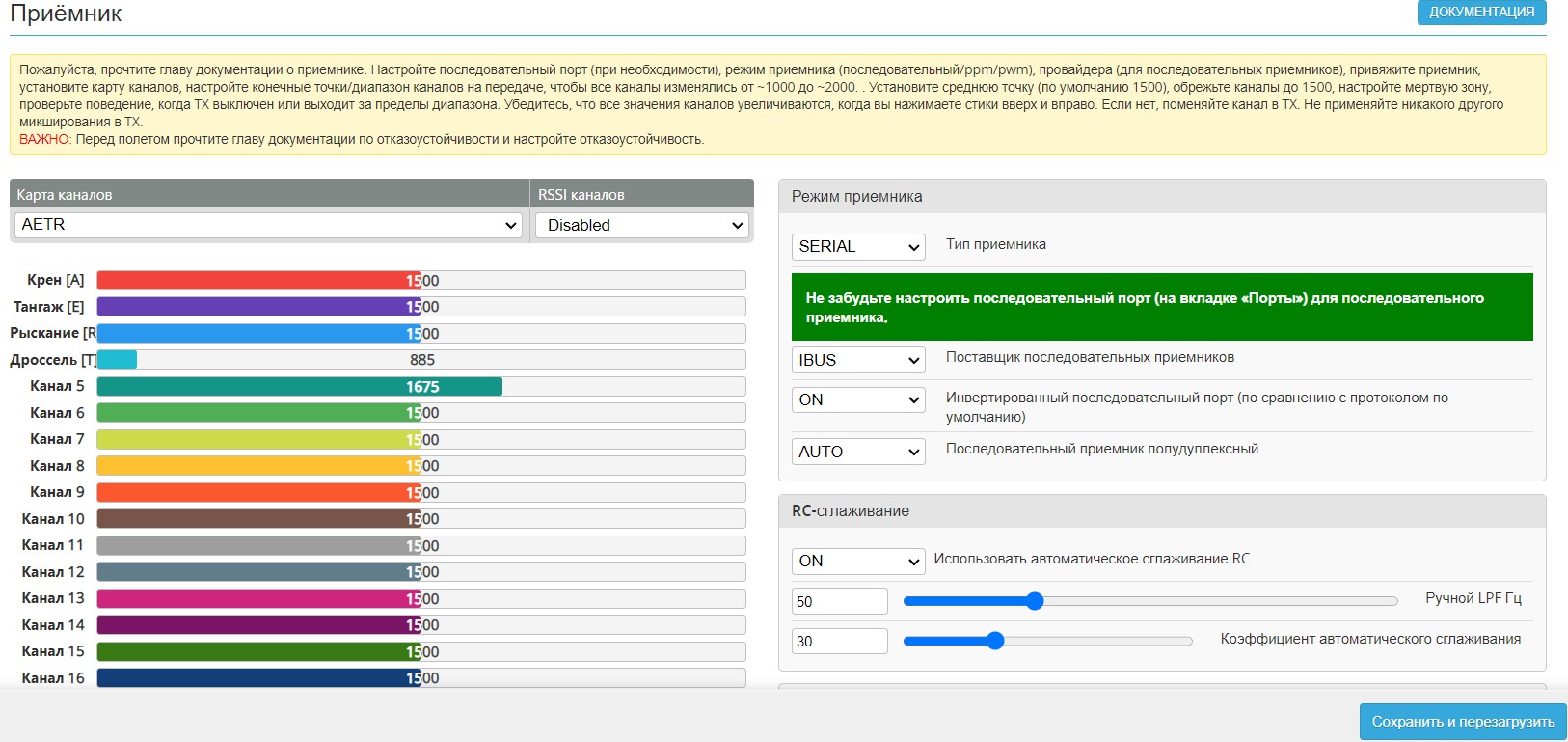
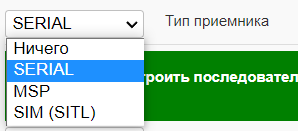
Основной раздел ‒ Режим приемника. Здесь настраивается тип соединения: MSP ‒ управляющий сигнал с периферийного устройства, например, ESP-32, SERIAL ‒ последовательное подключение по приемнику, SIM (SITL) ‒ подключение к симулятору.
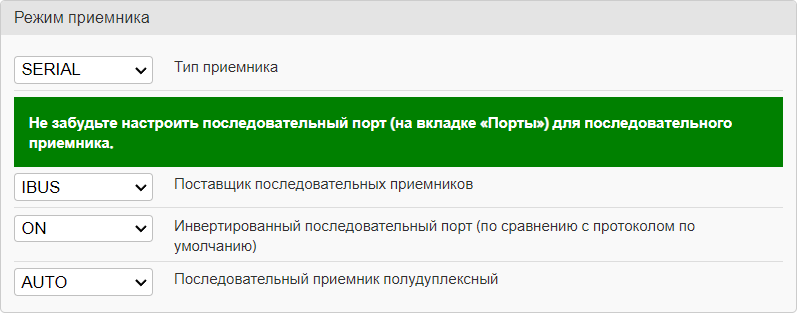
В режиме SERIAL выбирается протокол подключения, например, IBUS или SBUS. Протокол выбирается в зависимости от приемника.
Инвертированный последовательный порт ‒ активируется, если RX и TX порта не совпадают с настройками протокола.
Последовательный полудуплексный приемник ‒ приемник, способный не только принимать, но и передавать сигнал.
Далее настройки сглаживания радиосигнала. Здесь можно настроить фильтр нижних частот на сигнал, а также коэффициент автоматического сглаживания.
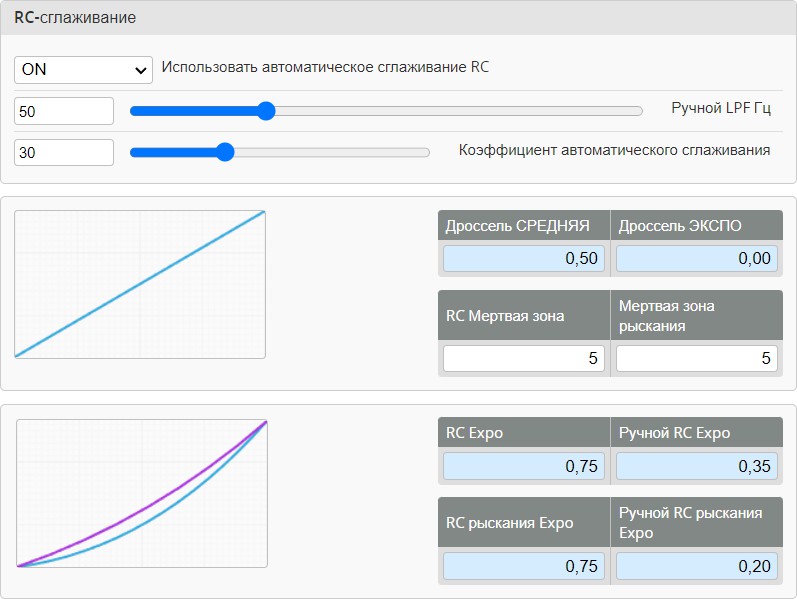
С термином EXPO можно ознакомиться в разделе «ПИД-настройки. Скорости и экспозиции». А мертвая зона ‒ это часть диапазона, в котором полетный контроллер не реагирует на изменение положения стика. То есть, например, если мертвая зона рыскания равна 5, изменение стика в диапазоне ±5 от центрального значения не будет влиять на полет.
Также во вкладке Приемник отображаются значения всех каналов. При успешном подключении приемника ползунки будут реагировать на движение стиков. Обратите внимание, что без подключения АКБ ползунки реагировать не будут.

Карта каналов может меняться в зависимости от производителя оборудования.
RSSI ‒ это измерение уровня сигнала, которое очень удобно, поскольку позволяет знать, выходит ли воздушное судно за пределы зоны действия или испытывает ли он радиопомехи. Здесь выбирается канал для измерения.
После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

Режимы
Подробнее
В данной вкладке настраиваются режимы полета воздушного судна.
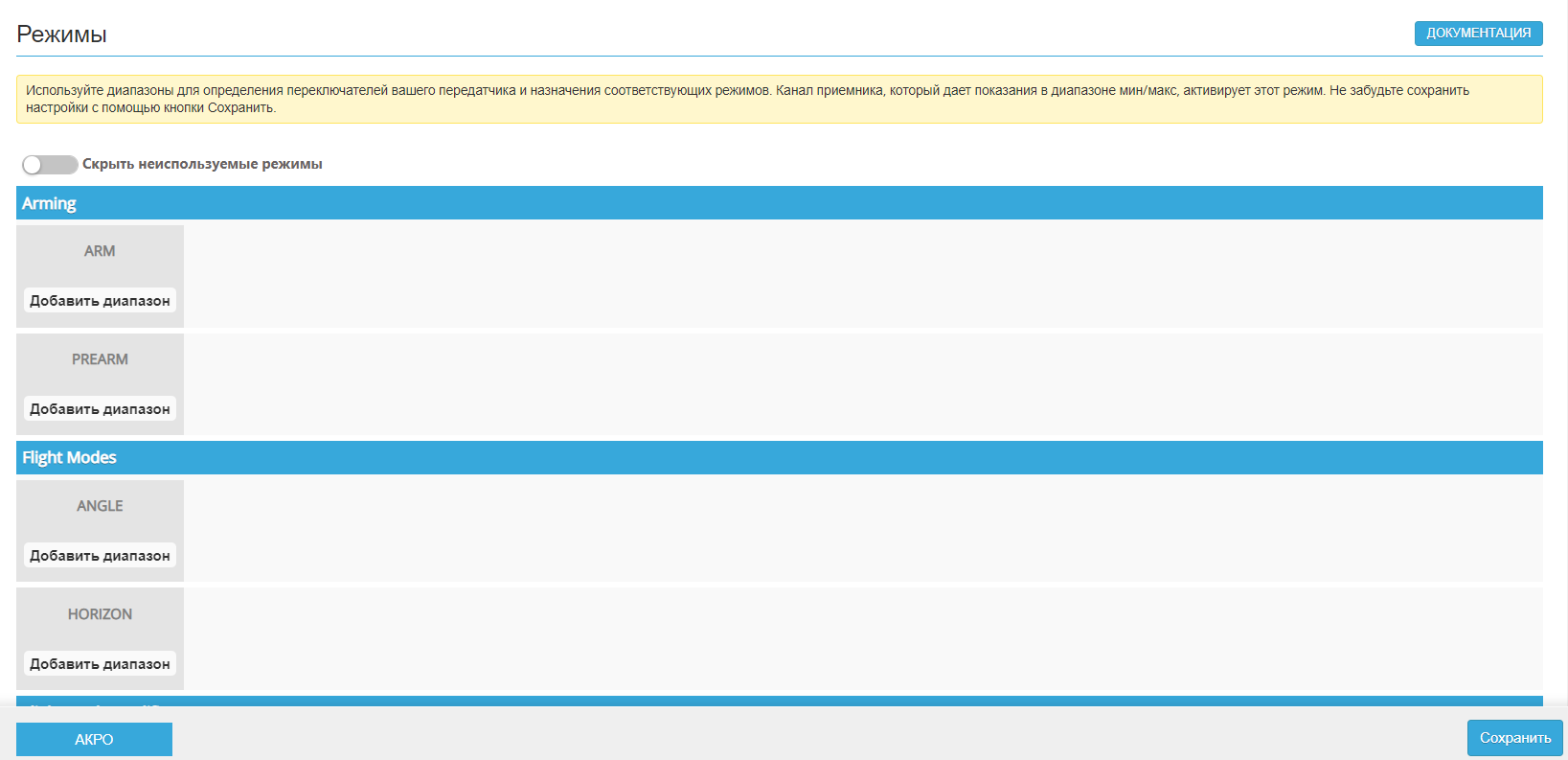
Чтобы настроить режим, нажмите «Добавить диапазон», тогда появится область настройки.


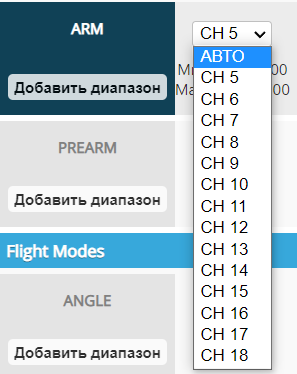
Выбирается канал, за которым закреплен режим.
Обратите внимание
что доступны только дополнительные каналы (AUX CHANNELS).
Далее выбирается диапазон активации режима. Это можно сделать с помощью ползунка. Когда голубая рейка внизу находится в синей области и название режима горит темно-синим цветом, режим активен.

Чтобы скрыть неиспользуемые режимы, переведите соответствующий ползунок в активное положение.
Чтобы удалить режим, нажмите крестик в углу настроечной области режима.
Основные режимы:
ARM ‒ режим предохранителя, предотвращает запуск двигателей при подключении питания. Когда активируется режим ARM, моторы запускаются. DISARM ‒ деактивация режима ARM.
ACRO ‒ режим полета воздушного судна, когда управление перемещением происходит по угловой скорости, данные считываются только с гироскопа, при этом расчет начального положения не происходит и при возвращении ручки управления в нейтральное положение воздушное судно сохранит последнюю ориентацию.
ANGLE ‒ режим стабилизации воздушного судна, при котором расчет изменения позиции происходит по углу отклонения. С помощью данных инерциальных датчиков вычисляется угол, на который отклоняется воздушное судно по какой-либо из осей при движении ручки управления. Когда ручка управления (стик) возвращается в нейтральное положение, полетный контроллер самостоятельно формирует управляющий сигнал, который возвращает воздушное судно в начальное положение. Режим имеет параметр максимального угла наклона, то есть, в крайнем положении стика воздушное судно будет удерживать определенный угол, например, 30 градусов по крену.
HORIZON ‒ режим похож на ANGLE, но дает возможность переворачивать воздушное судно вокруг оси, выаолянть трюки, так как расчет происходит по скорости.
HEADING HOLD ‒ навигационный режим удержания «головы». В этом режиме как бы воздушное судно не поворачивалось по рысканию его перед будет там же, где перед оператора.
SURFACE ‒ режим следования за поверхностью, в навигационных режимах траектория движения воздушного судна будет совпадать с линией поверхности/рельефа.
NAV ALTHOLD ‒ навигационный режим удержания высоты. Воздушное судно удерживает позицию по оси Z. NAV POSHOLD ‒ навигационный режим удержания позиции. Воздушное судно удерживает позицию по осям X и Y.
После настройки нажмите «Сохранить» для внесения изменений.

Корректировки
Подробнее
Вкладка Корректировки создана для изменения параметров прямо в полете.
Так как многие параметры имеют большое воздействие на полет,
следует соблюдать ряд правил:
Всегда вносите коррективы при полете на большой открытой местности.
Внесите небольшие изменения и осторожно проведите полет, чтобы проверить настройки.
Дайте себе достаточно места и времени для полета, чтобы приспособиться к тому, как ваши изменения повлияют на поведение самолета.
Не забудьте установить переключатели каналов регулировки в центральное положение перед включением передатчика и воздушного судна.
Лучшим выбором для этой цели будет переключатель мгновенного действия с тремя положениями, то есть такой, который автоматически возвращается в исходное положение, когда вы его
отпускаете.
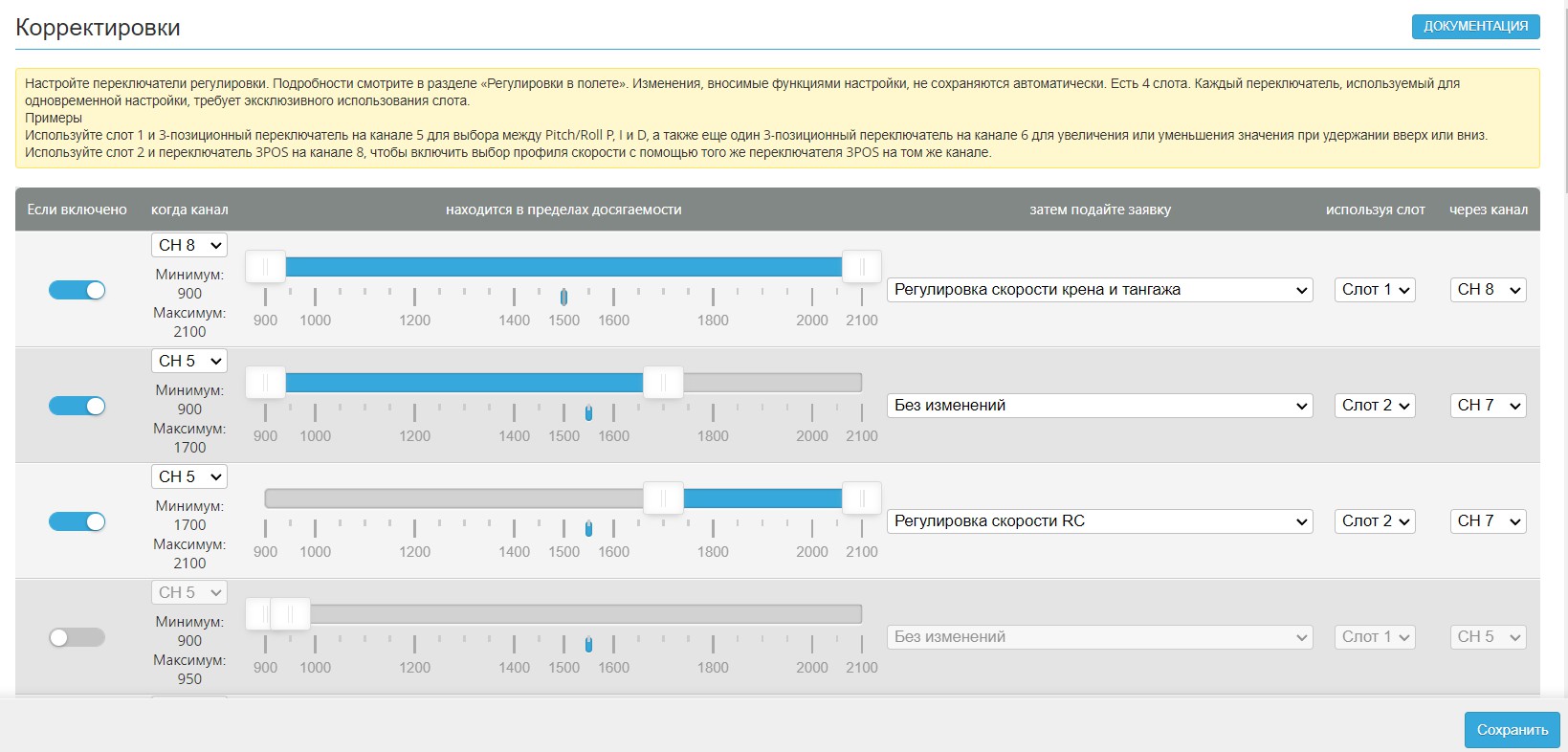
Для настройки:
- Активируйте строку;

- Выберите канал, значение которого будет условием активации корректировки;
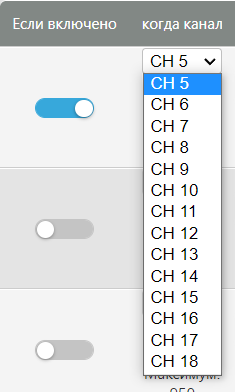
- Выберите диапазон работы корректировок;

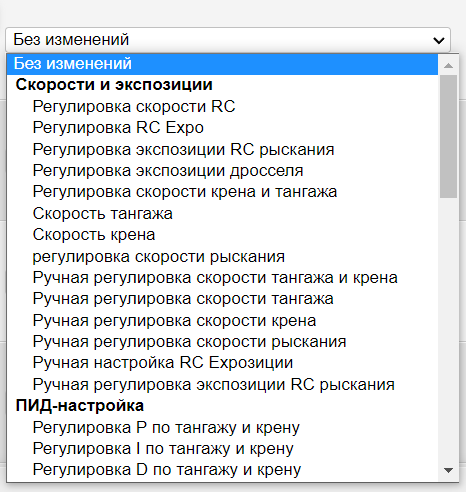
- Выберите корректировку;
- Выберите слот, их доступно 4;

- Выберите канал, на котором будет работать корректировка.
Пример:
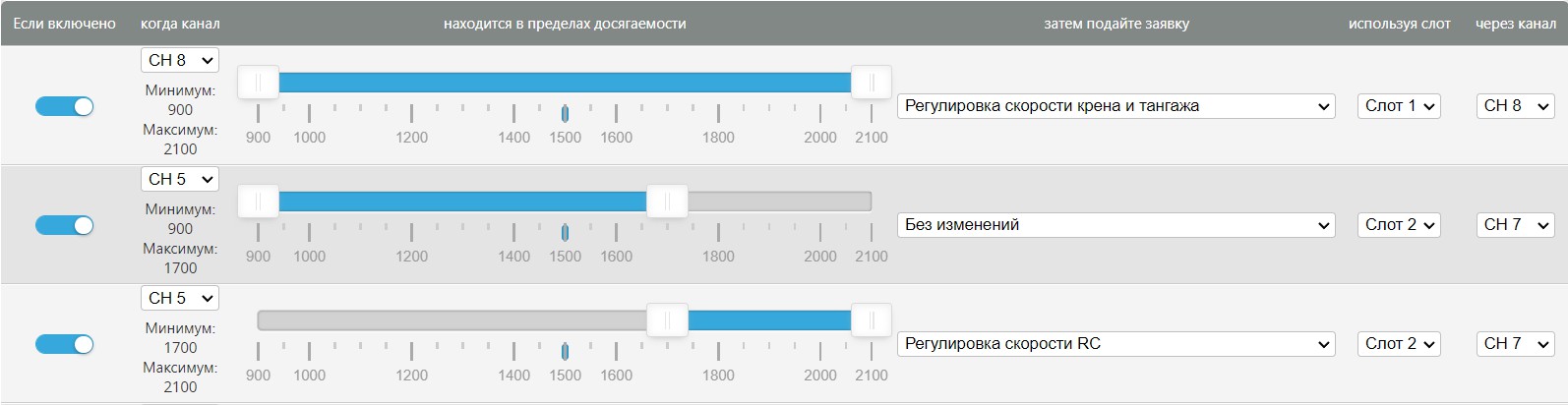
В любом положении 8 канала работает регулировка скорости крена и тангажа.
Когда 5 канал находится в положении 900-1700, ничего не происходит. Когда 5 канал переходит в положение 1700-2100, активируется регулировка скорости RC на 7 канале.
Каждый слот соответствует своей корректировке. Всего доступно 4 слота.
После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.
GPS
Подробнее
Вкладка GPS отвечает за отображения положения воздушного судна по данным систем спутниковой навигации.
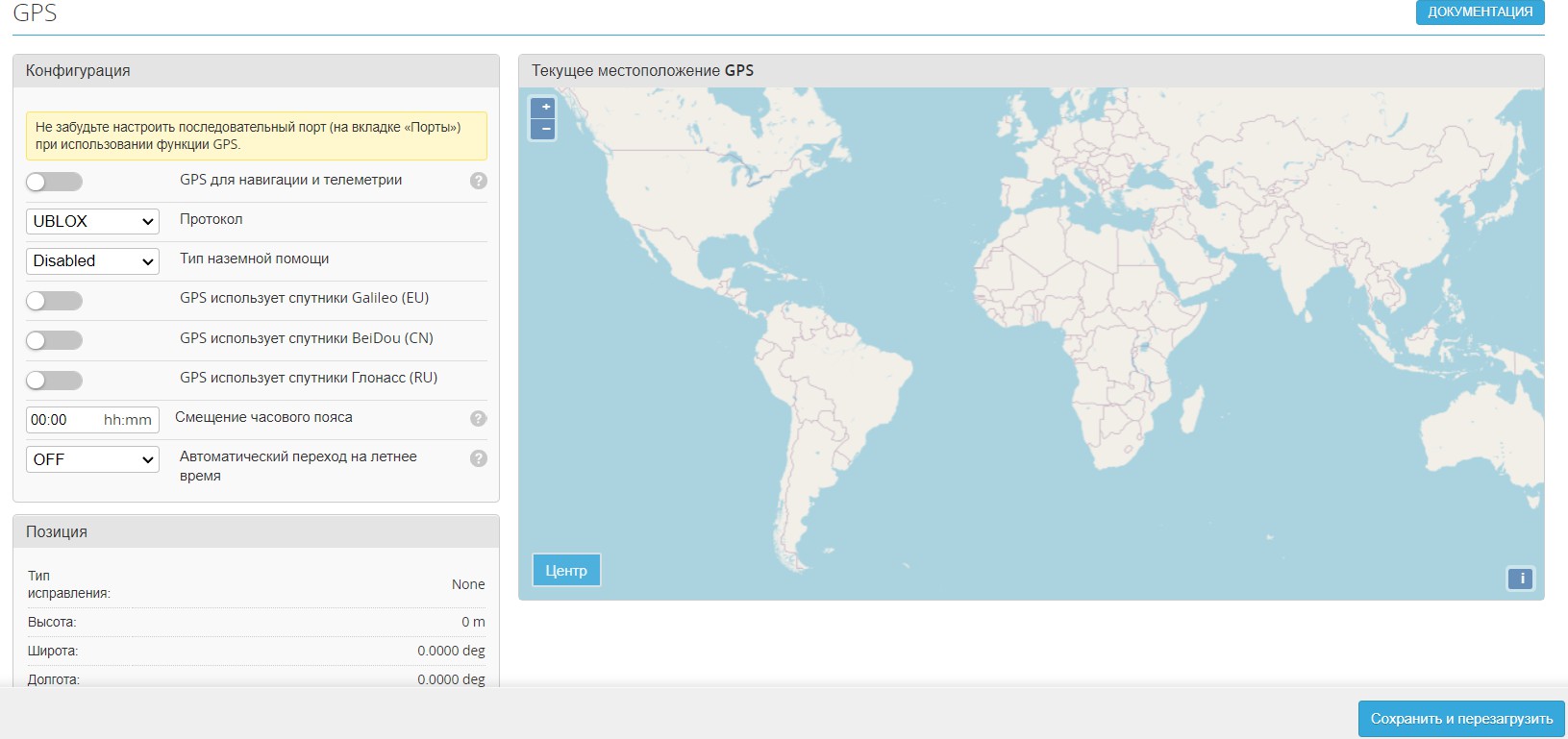
Перед тем как настраивать GPS, настройте последовательный порт во вкладке Порты на работу с GPS-датчиком.

Активируйте «GPS для навигации и телеметрии» во вкладке Конфигурация и во вкладке GPS.

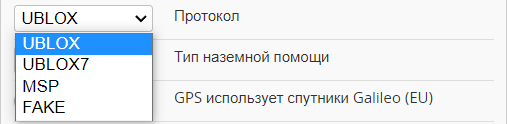
Далее выберите протокол общения между полетным контроллером и приемником GPS. Протокол зависит от модели.
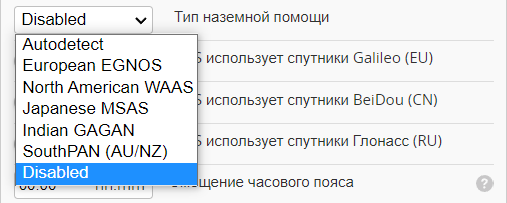
Выберите тип наземных станций. Наземные станции ‒ это часть глобальных систем навигации, они обрабатывают и корректируют данные, получаемые со спутников. Тип наземной станции зависит от государства и глобальной системы навигации.
Далее выберите спутниковую систему, с помощью которой будет производится навигация.
Galileo ‒ Европейская спутниковая система навигации.
BeiDou ‒ Китайская спутниковая система навигации.
ГЛОНАСС ‒ Российская спутниковая система навигации.
Смещение часового пояса устанавливается для корректной записи отметок времени черного ящика (Blackbox). Смещение считается от UTC, то есть, от Гринвичского меридиана. Например, московское время +3 UTC. - или ‒ определяются относительно Гринвичского меридиана: на восток «+», на запад «‒».
Переход на летнее время предусмотрен для территории США и Евросоюза.
Нижние области выводят спутниковые данные о положении воздушного судна.
«Позиция» отображает текущую высоту по GPS, широту и долготу (координаты в градусах), скорость по GPS, расстояние до дома, статусы посадки и исправления.

«Статистика» отображает данные о соединении: частоту обновления, ошибки, сообщения и т.д.

Также во вкладке отображается карта мира для отображения положения воздушного судна по спутникам. Здесь можно отследить перемещение и проверить корректность работы датчика. Карта в формате OpenStreetMap (OSM).
Для подключения GPS-приемника на ARA EDU следуйте следующим шагам:
Подключите приемник в 6-пиновый порт на плате полетного контроллера;
Во вкладках GPS и Конфигурация активируйте функцию «GPS для навигации и телеметрии», нажмите «Сохранить и перезагрузить»;

- Во вкладке Конфигурация выберите AUTO для Магнитометра, нажмите «Сохранить и перезагрузить»;

- Во вкладке Порты выберите GPS для 2 последовательного порта, нажмите «Сохранить и перезагрузить»;

- Во вкладке GPS выберите протокол UBLOX7, тип наземной помощи - Autodetected, нажмите «Сохранить и перезагрузить»;

GPS-приемник будет работать только с подключенной АКБ. До 26 секунд данные с GPS могут не поступать и полетный контроллер будет сигнализировать об этом писком моторов. При успешном подключении в разделе Статистика появится информация о сообщениях.

А все подключенные датчики буду гореть синим.

Если подключение не прошло, в командной строке установите максимальную скорость передачи данных для GPS:
set gps_auto_baud_max_supporte = 115200
После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

Магнитометр
Подробнее
Вкладка Магнитометр позволяет настроить направление носа (или головы) воздушного судна независимо от ориентации платы.
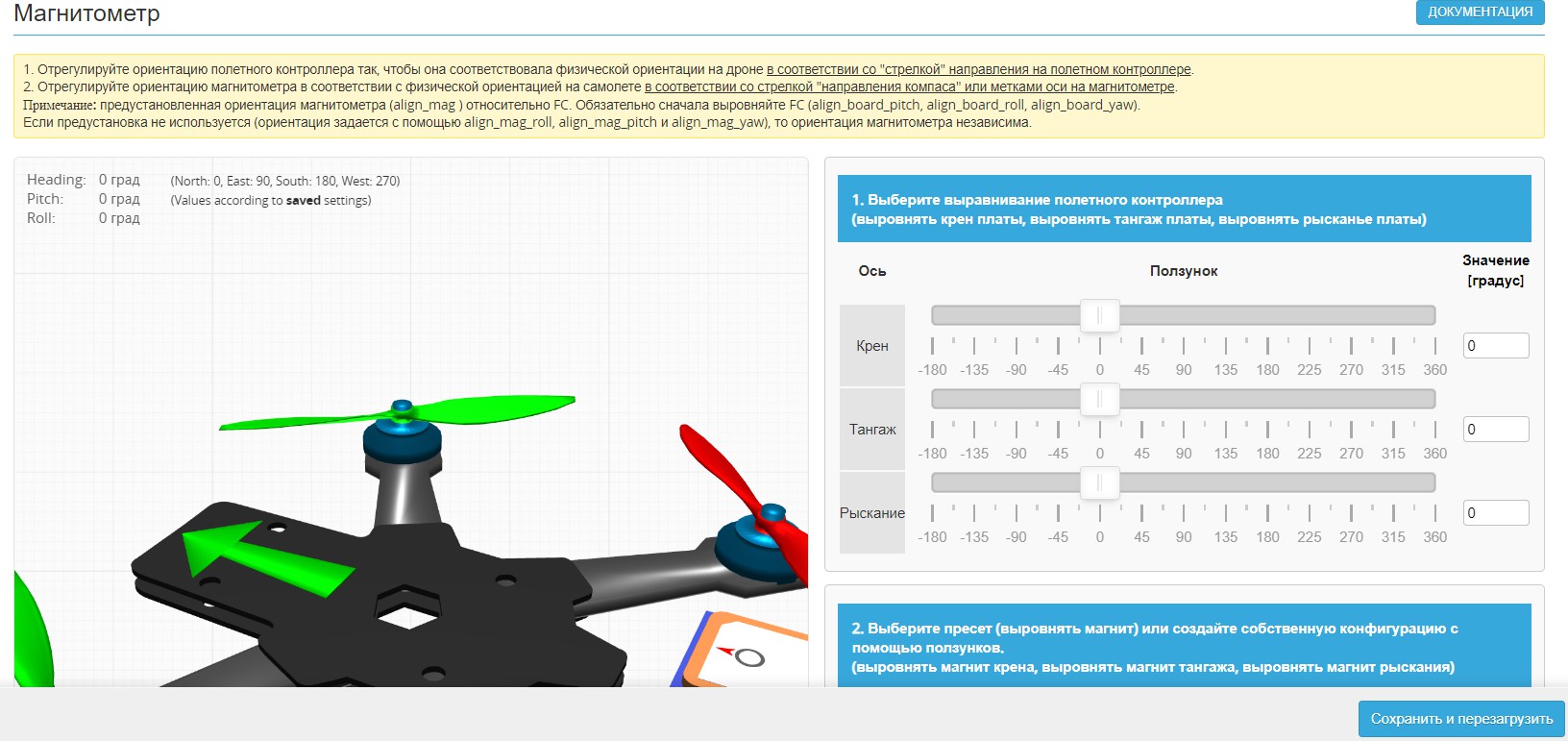
Во вкладке настраиваются 2 платы: магнитометр (если он подключен) и полетный контроллер. Платы отображаются в интерактивном пространстве во вкладке, в нем можно повращать воздушное судно и проверить расположение плат.
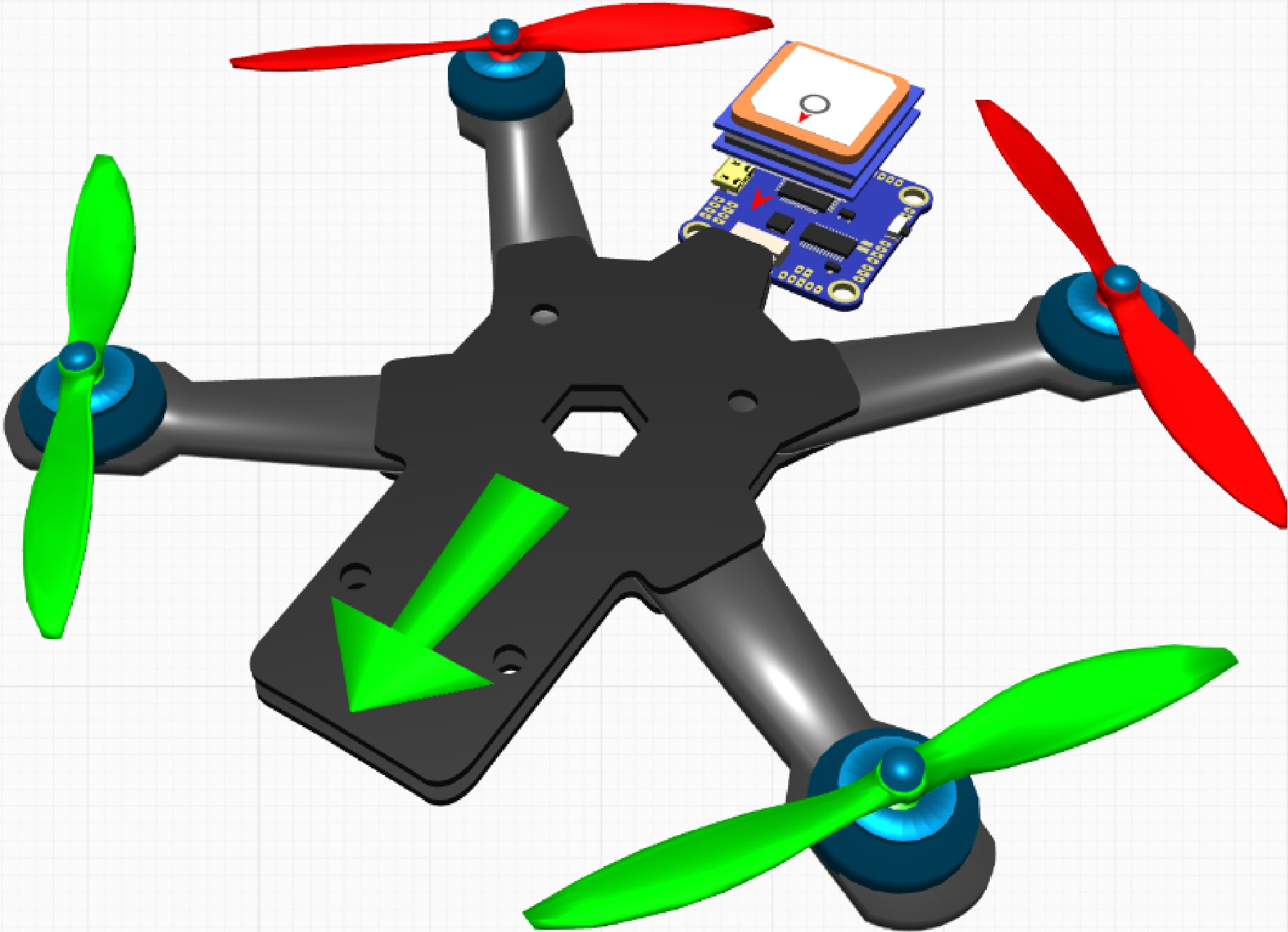
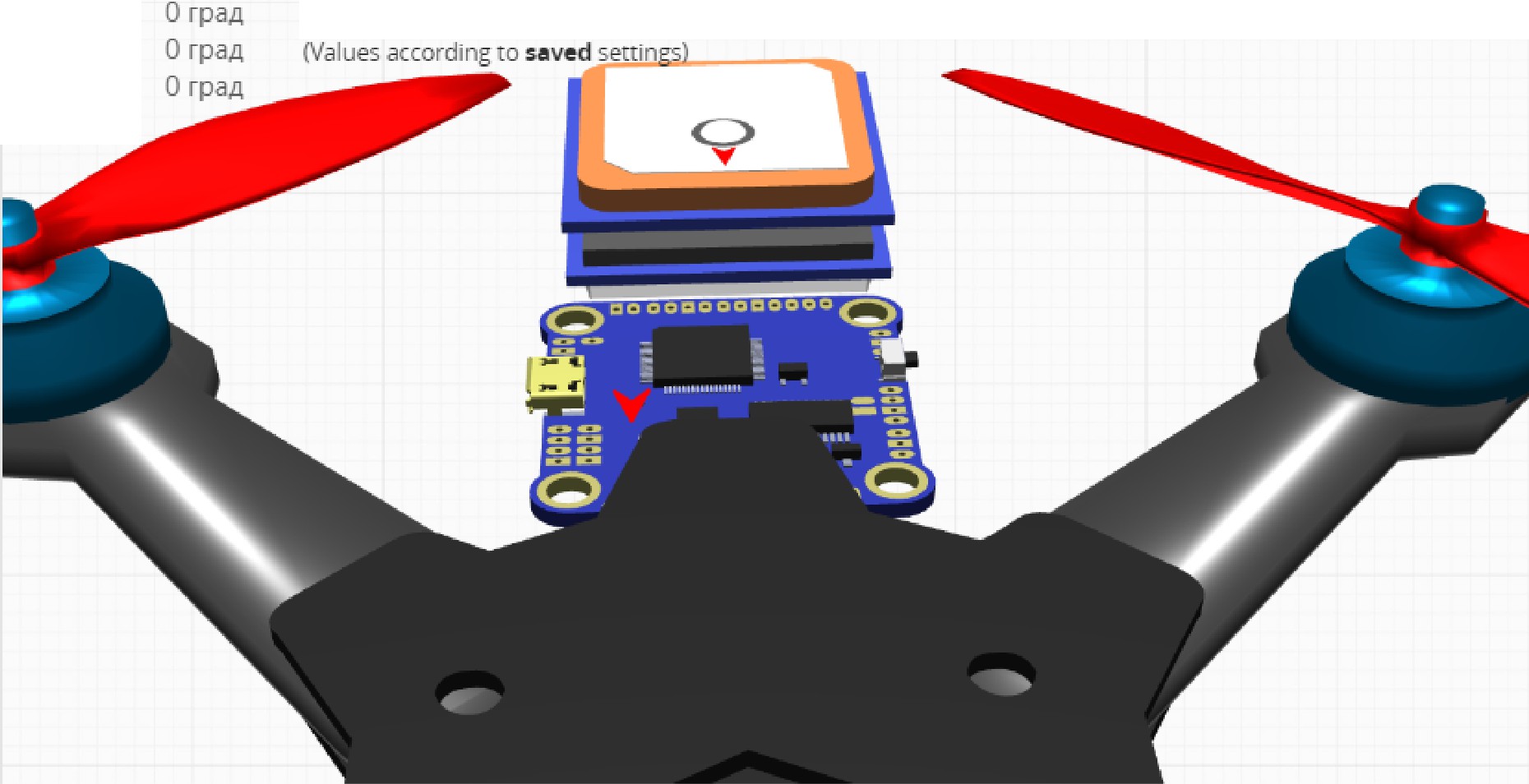
У каждой платы с навигационным оборудованием (инерциальная система: акселерометр, барометр, гироскоп) есть внутреннее значение «севера», грубо говоря, где у платы перед. Направление указывается стрелкой на корпусе платы или корпусе датчиков (акселерометра и гироскопа). Не всегда получается разместить плату так, чтобы перед платы совпадал с передом воздушного судна, тогда ориентацию можно изменить программно, чтобы полетный контроллер учитывал в расчетах угол поворота или наклона платы относительно её «севера».
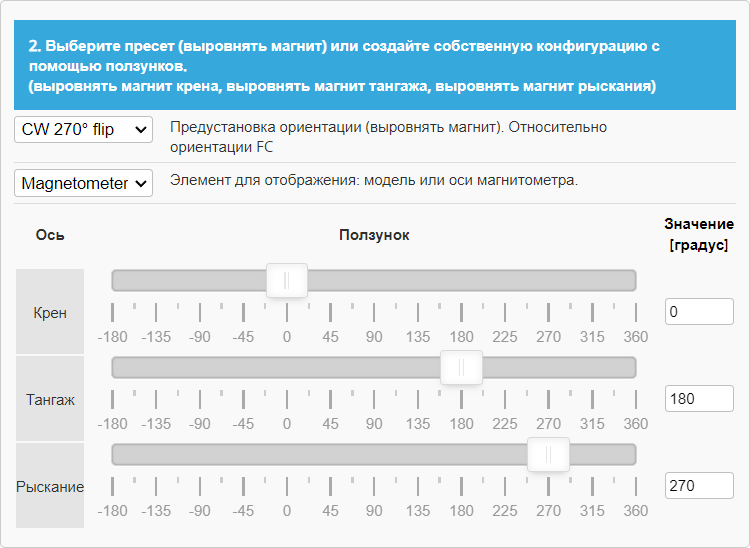
Для каждой платы выделена система ползунков по 3 осям: крен, тангаж и рыскание, а также можно ввести конкретное значение градусов.

Для магнитометра доступны предустановки со значениями, где CW ‒ по часовой стрелке, flip ‒ переворот на 180 градусов, 270 ‒ разворот по рысканию в градусах.
После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.

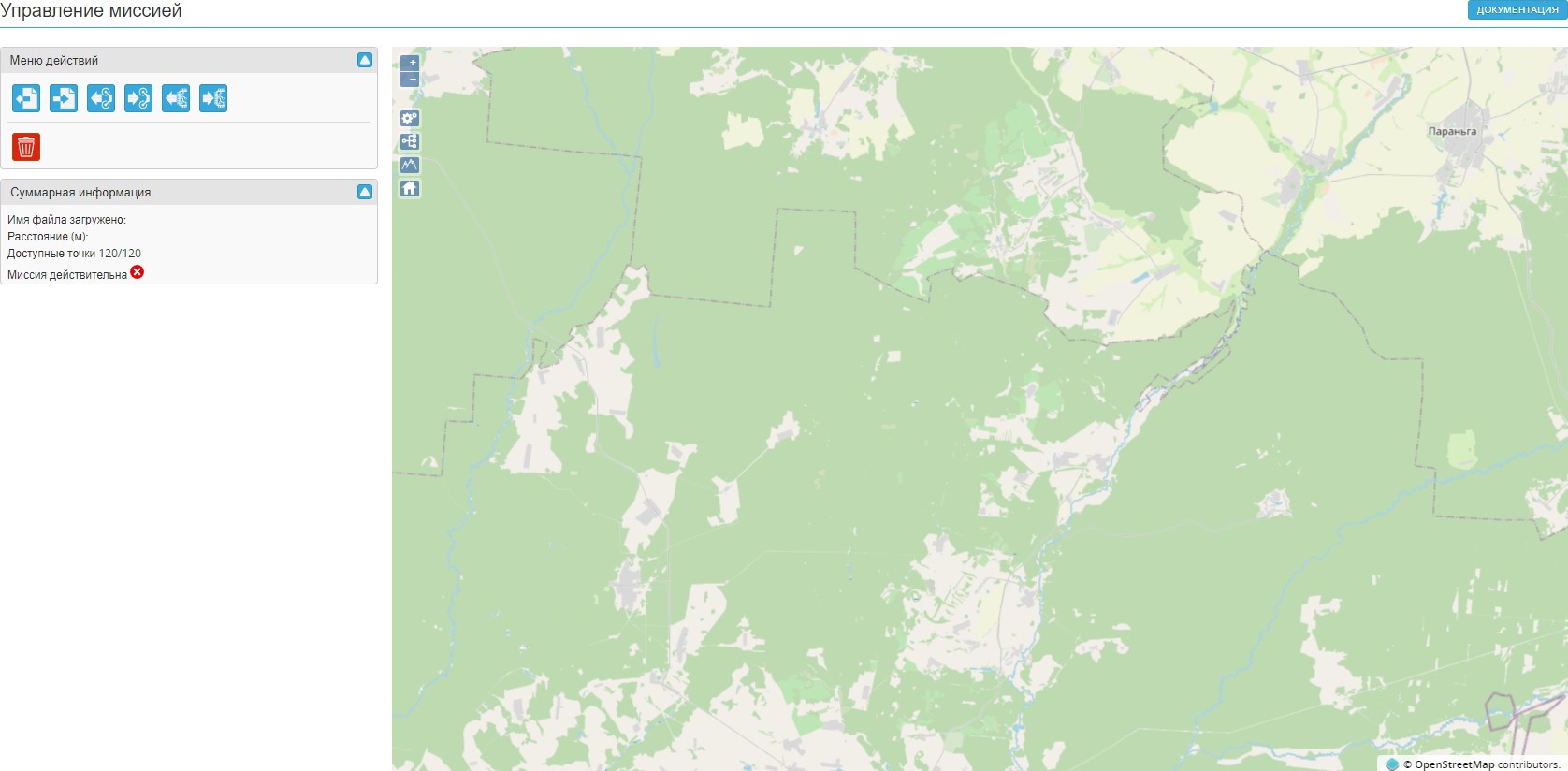
Управление миссией
Подробнее
Вкладка Управление миссией реализует полет воздушного судна по маршрутным точкам.
Обратите внимание
что без датчика позиционирования в глобальной системе координат (например, GPS), перемещение по маршрутным точкам небезопасно.
Режим перемещения по маршрутным точкам (WayPoint ‒ WP) является автономным, то есть, без вмешательства в управление оператора. Как только воздушное судно перейдет в режим перемещения по маршрутным точкам, управление на себя возьмет полетный контроллер. Оператор может только перевести воздушное судно обратно в ручной режим управления.
В «Меню действий» доступны следующие функции: Загрузить файл миссии, Сохранить файл миссии, загрузить миссию из полетного контроллера, сохранить миссию в полетный контроллер, загрузить миссию в EEPROM (Electrically Erasable Programmable Read-Only Memory ‒ микросхема памяти), сохранить миссию в EEPROM, удалить всё.
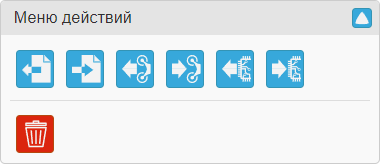
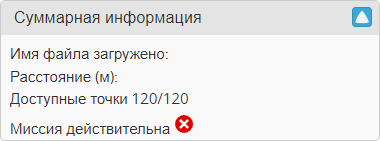
Для маршрута доступно 120 точек и 10000 метров.
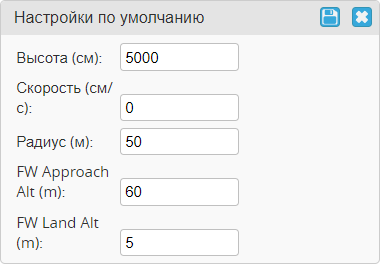
Чтобы открыть «Настройки миссии», нажмите знак с изображением двух шестеренок. Здесь доступны следующие настройки: высота в см, скорость в см/с, радиус в м, высота подхода к посадке для самолетного типа в м, высота посадки для самолетного типа в метрах.

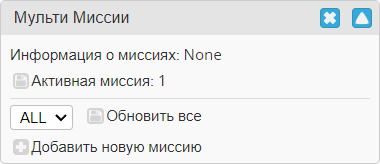
Чтобы открыть «Мультимисси» нажмите на знак с изображением вилки. Здесь можно добавить ещё миссии, переключиться между ними или отображать их все вместе.

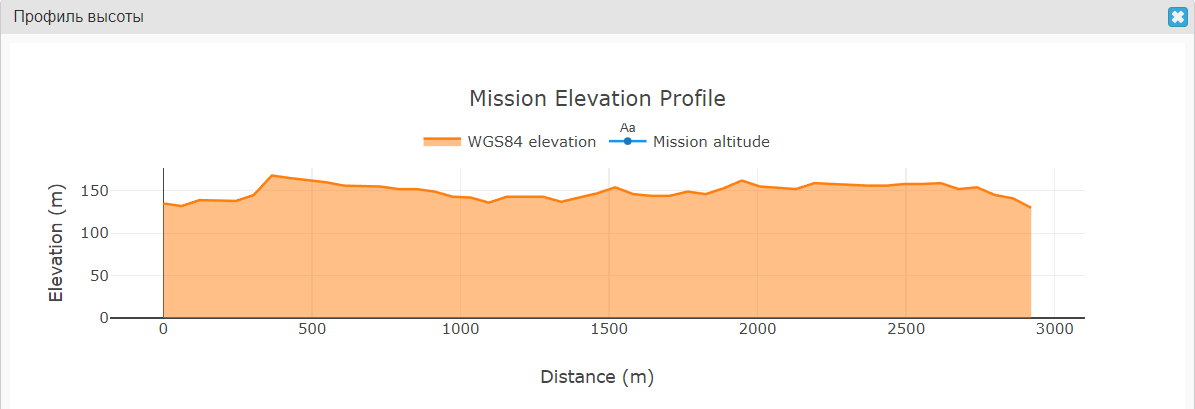
Нажмите на знак с изображением горы, чтобы открыть профиль высот. Ось ординат отвечает за высоту (eltvation, в метрах) рельефа относительно уровня моря, ось абсцисс отвечает за расстояние в метрах.
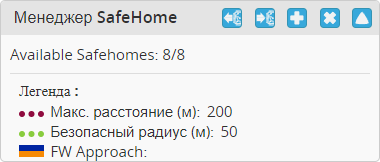
Чтобы определить позицию воздушного судна (домашнюю точку), нажмите на знак с изображением домика. Станет доступен раздел «Менеджер SafeHome», в нем отображается легенда, её значения настраиваются во вкладке «Расширенная настройка. Настройки навигации по маршрутным точкам», а также доступные домашние точки.

Чтобы добавить точку, нажмите в области карты левой кнопкой мыши.
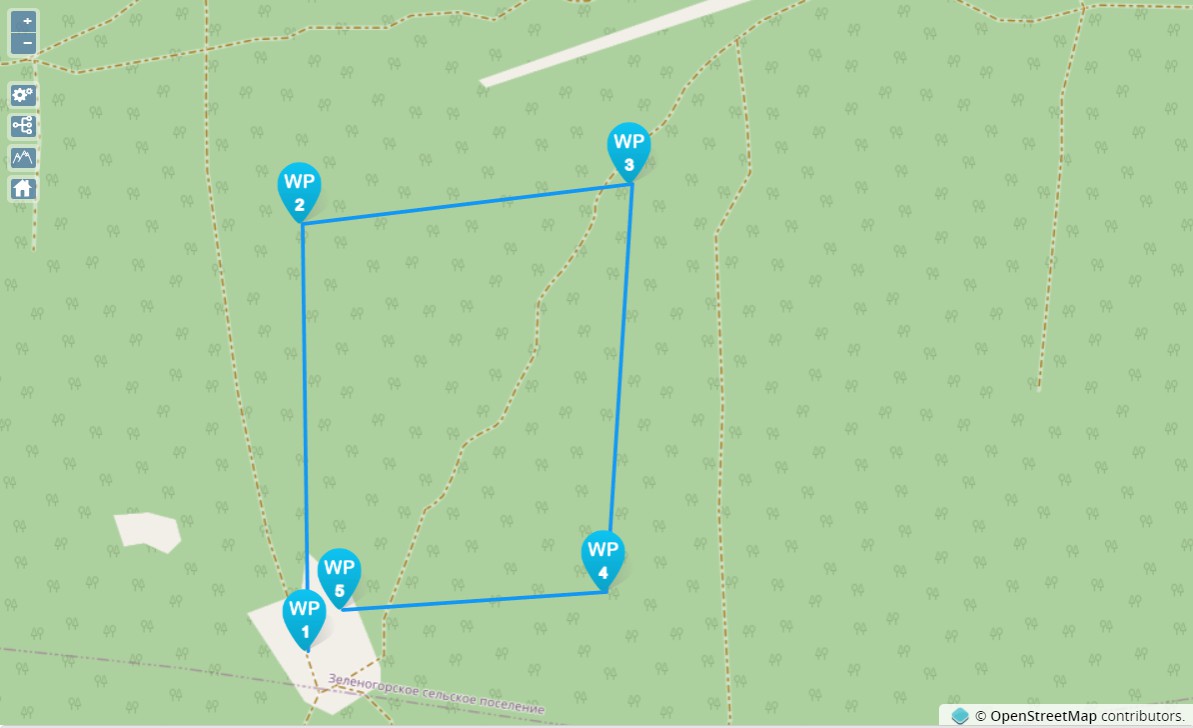
Чтобы настроить параметры конкретной точки, щелкните по ней плевой кнопкой мыши, значок станет красным, слева появится новый раздел «Edit point <номер точки>». Здесь можно настроить тип точки ‒ маршрутная точка WayPoint, удержание позиции по времени PH_TIME (Position Hold Time), цель POI (Point of Interest), посадка Land.

Далее указаны координаты точки, их можно изменить самостоятельно. Lat ‒ latitude, широта; Lon ‒ long, долгота. Координаты указаны в градусах (гг.ггггг). Северная широта и восточная долгота имею знак +, южная долгота и западная широта имеют знак ‒.
Обратите внимание
что широта имеет максимальный градус 90, а долгота 180.
Следующее значение ‒ высота точки в сантиметрах. В базовых настройка высота считается от земли, ниже можно настроить отсчет высоты от уровня моря.
Elevation ‒ превышение уровня земли над уровнем моря.
Grd Dist ‒ высота над уровнем земли. Скорость в см/с.
Сохраните миссию на персональном компьютере или в полетном контроллере, иначе, при переходе в другую вкладку, данные будут утеряны.
Экранное меню
Подробнее
Вкладка Экранное меню предназначено для полетов от первого лица (FPV). Здесь выбирается информация, которая будет отображаться в очках пилота. Можно создать 3 альтернативных макета изображения, а также посмотреть предпросмотр и в той же области перемещать параметры.
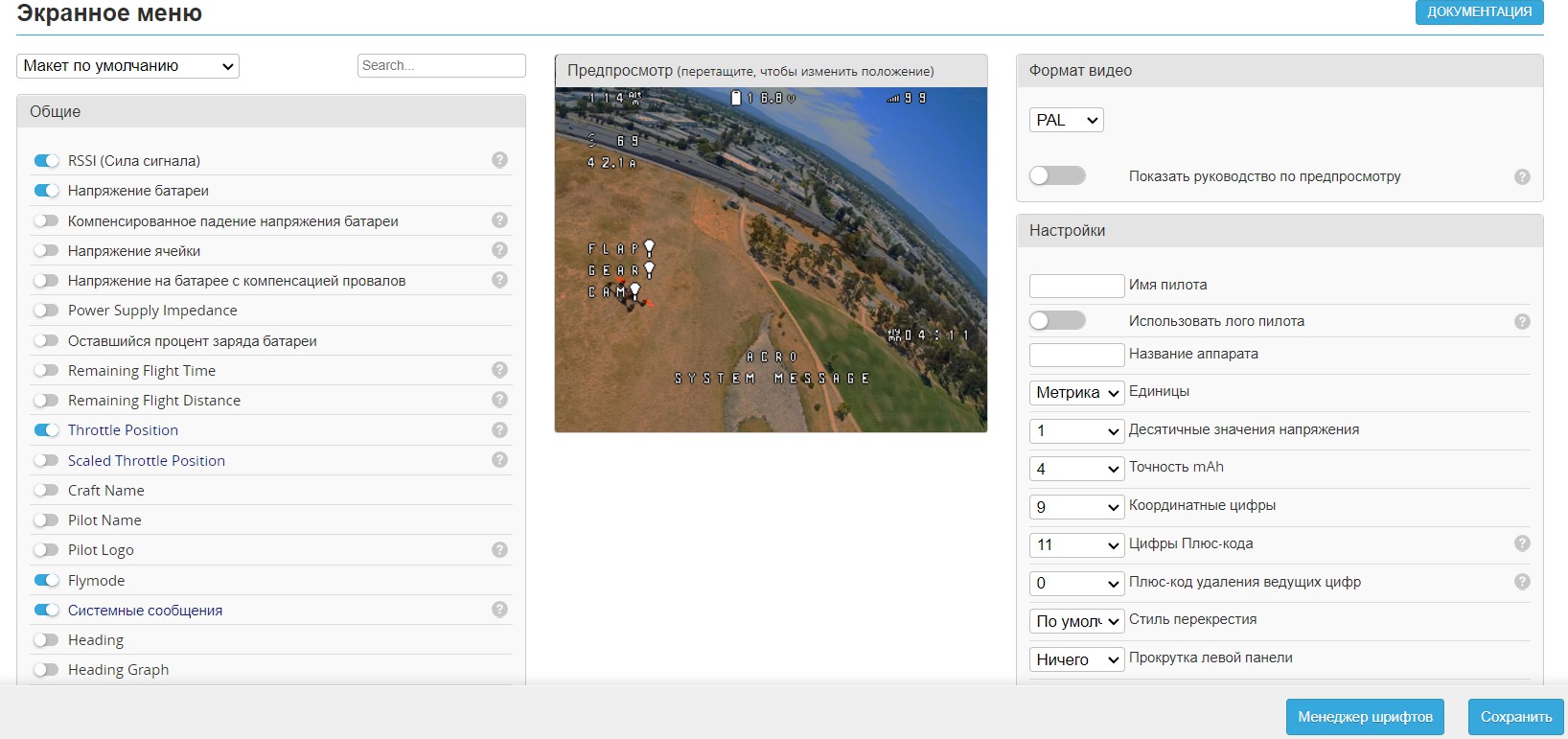
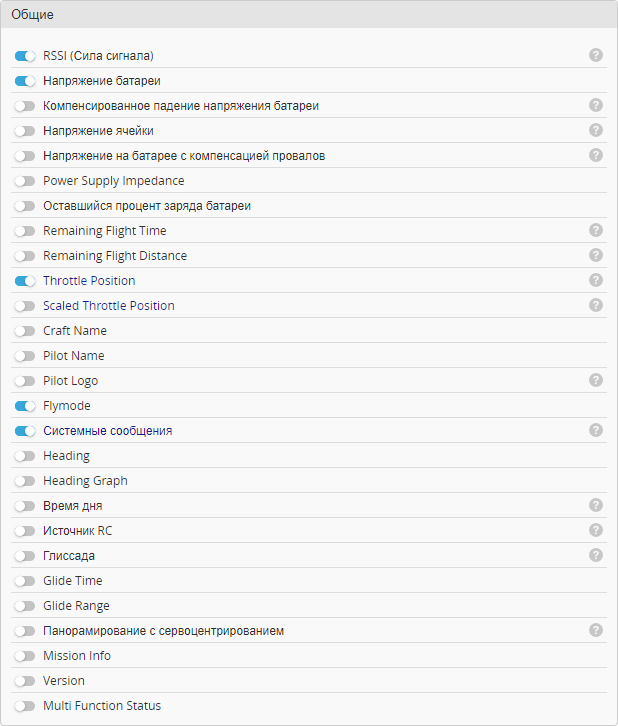
Общие настройки. Здесь отображаются основные параметры, такие как напряжение батареи, процент заряда, имя пилота, режим полета и т.д.
Температура. Здесь можно вывести температуру датчиков.
Высота. В данном разделе настраивается вывод разных высот и вертикальной скорости.
Сила перегрузки. Выводит аэродинамическую перегрузку, которой подвергается воздушное судно по трем осям.
Таймеры. Засекает время от активации (Ontime) или от взлета (Flytime).
Отношение. В данной вкладке можно выбрать авиагоризонт.

Текущий измеритель. Выводит характеристики аккумуляторной батареи.
Ограничения мощности. Содержит параметры ограничения, например, активный предел тока.
Карты и радары. Предоставляет параметры карты, например, масштаб, радар, справочник по карте.
Видеопередатчик. Отображение канала передачи и уровня мощности видеопередатчика.
Индикаторы переключения. Индикаторы переключения периферии.
Глобальные перемены. Значения глобальных перемен.
Регулируемые значения RC. Значения регулирования радиосигнала по корректировкам ПИД-регуляторов, рэйтов, экспо и т.д.

Выходы ПИД-регуляторов. Значения ПИД-регуляторов, FW ‒ для самолетов, MC ‒ для мультироторов.
Формат видео. Выбор размера изображения.
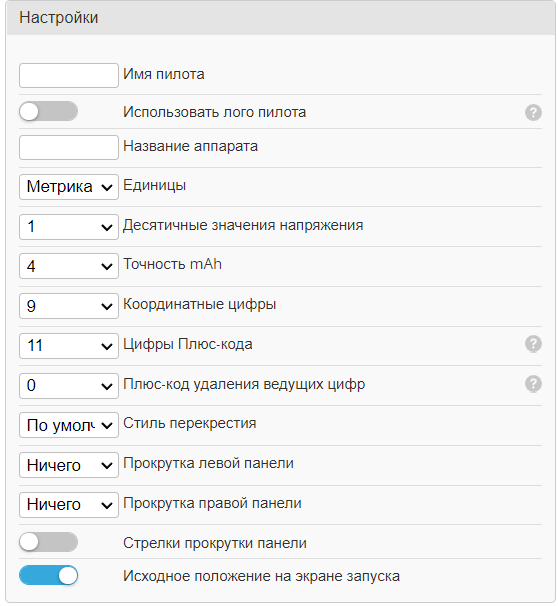
Настройки. Здесь настраиваются параметры, выводимые на OSD. Например, имя пилота, точность оборотов ESC, координатные цифры и т.д.
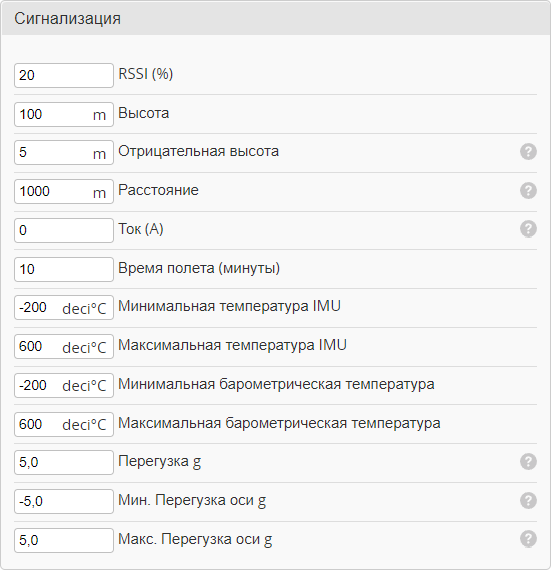
Сигнализация. Настройка параметров RSSI.
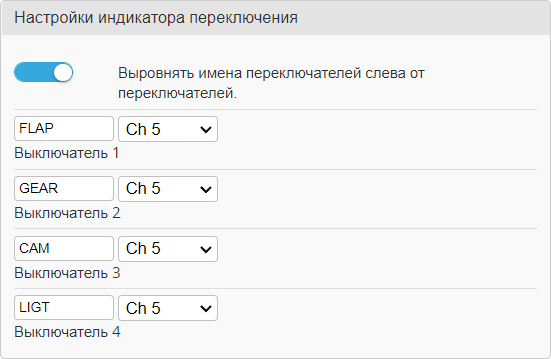
Настройки индикаторов переключения. Здесь можно настроить выключатели, закрепить из за каналом и дать имя.
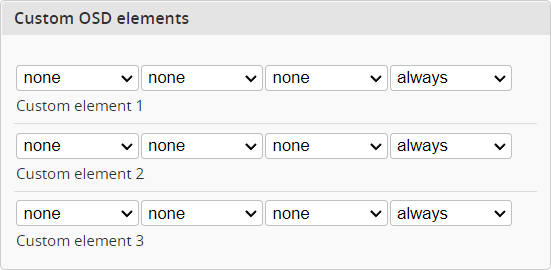
Custom OSD elements. В данной области можно настроить пользовательские элементы, не предусмотренные конфигуратором.
Настройки экранного меню панорамного сервопривода. Здесь настраивается режим, который позволяет отображать элементы меню направления указывали в нужном направлении при поворотах ракурса.
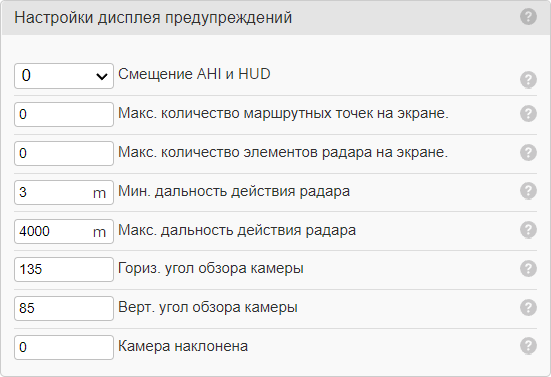
Настройки дисплея предупреждений. Параметры ограничения, после которых срабатывают предупреждения.
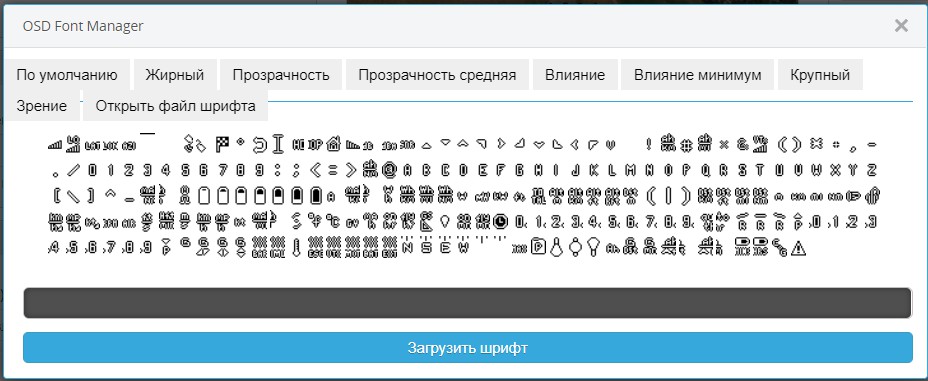
Менеджер шрифтов позволяет форматировать шрифт и загружать пользовательские шрифты.

После настройки нажмите «Сохранить» для внесения изменений.

Светодиодная лента
Подробнее
Контроллер полета может управлять цветами и эффектами отдельных светодиодов на ленте.
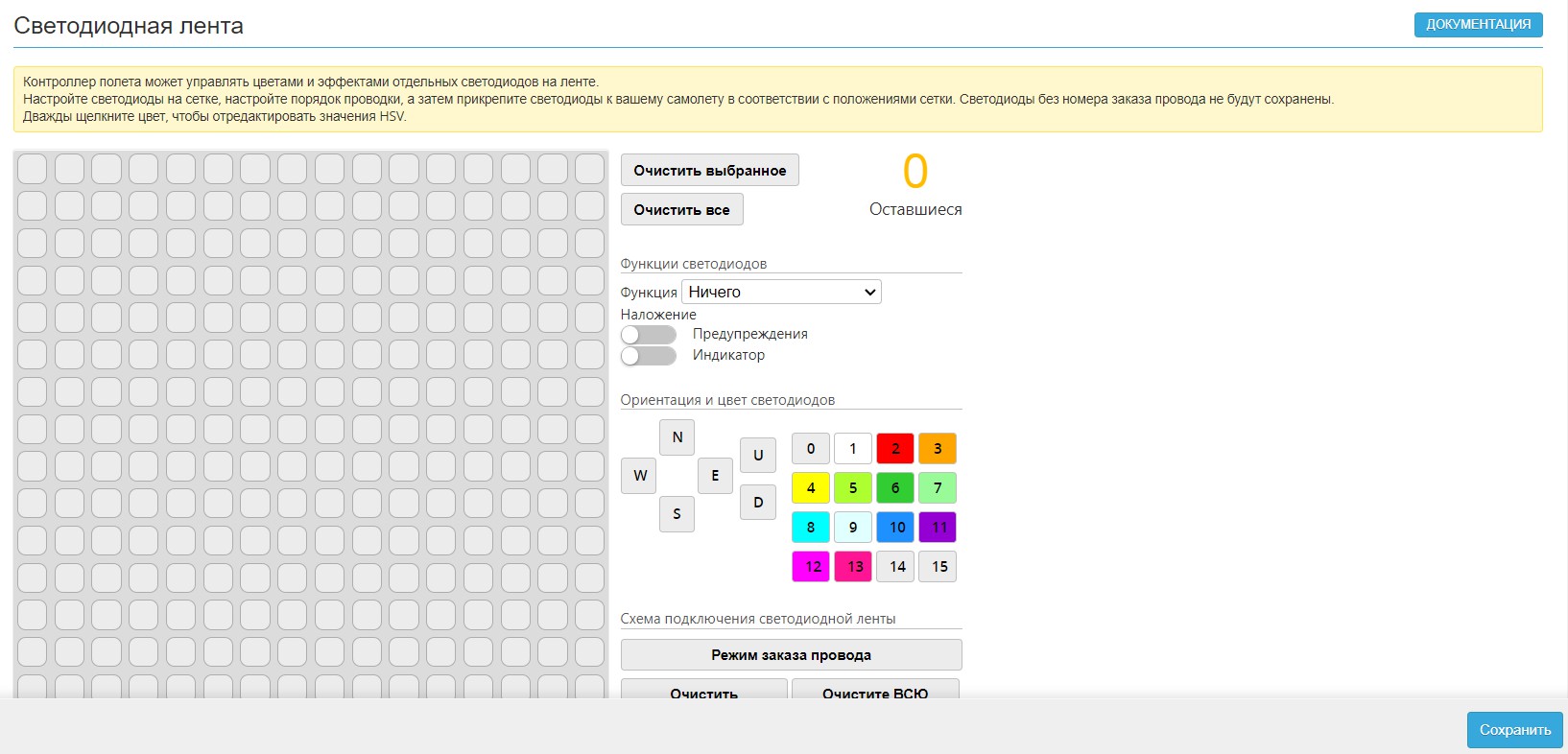
В данной вкладке настраивается светодиодная лента, которая по желанию может устанавливаться на учебный БАС в качестве габаритных огней.
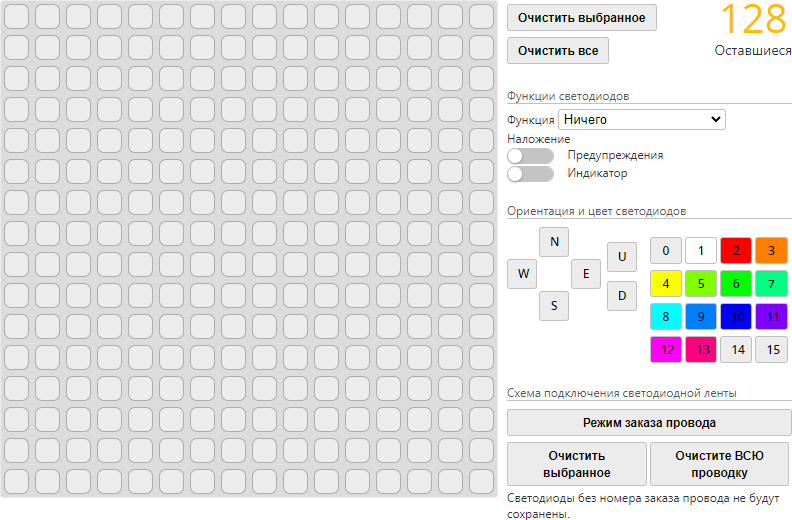
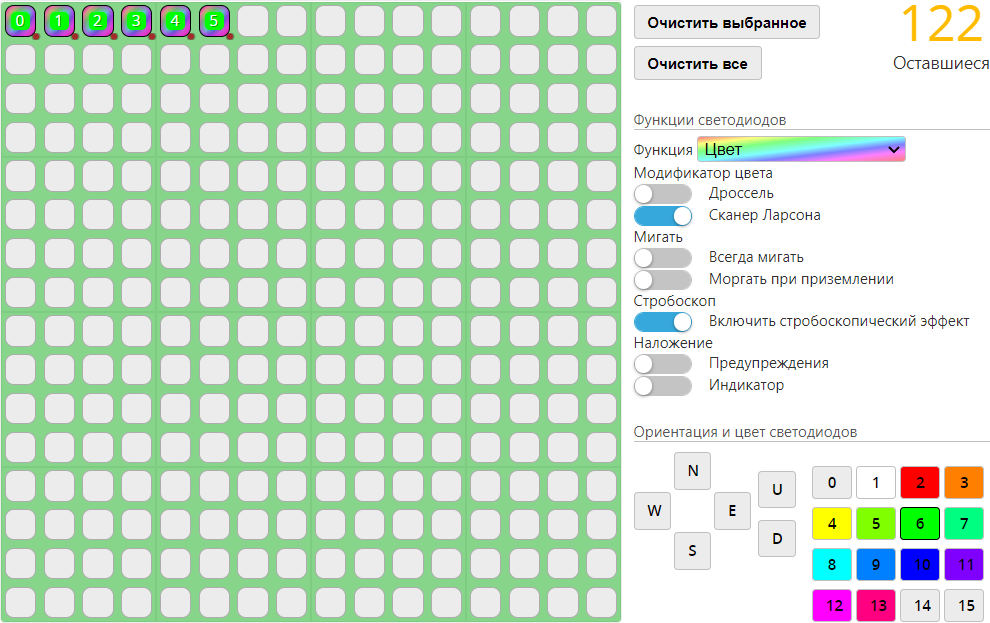
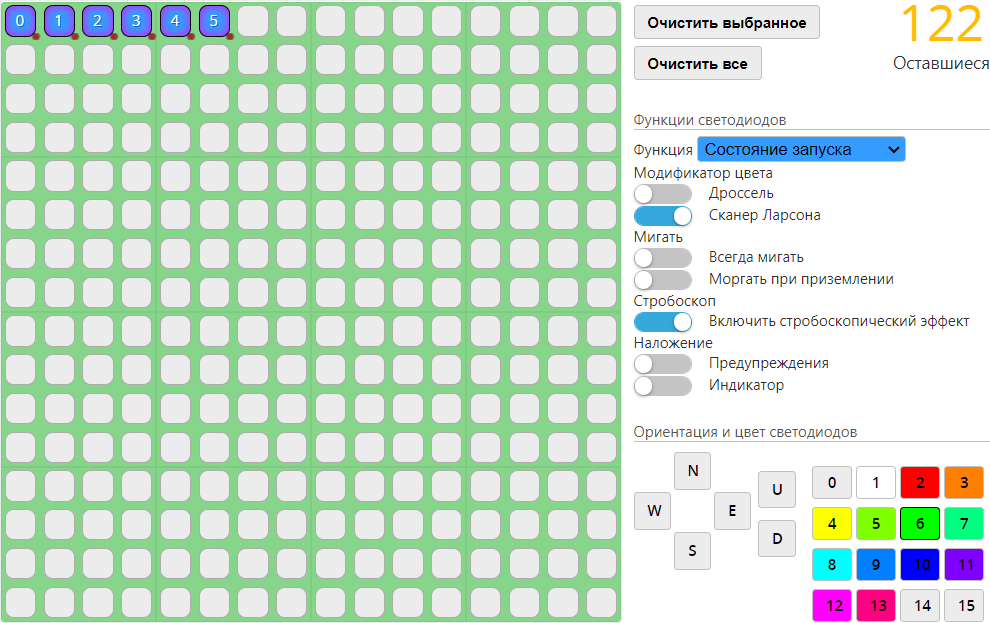
Конфигуратор поддерживает настройку 128 светодиодов. Настройка проводится по алгоритму:
- Нажмите кнопку Режим заказа провода
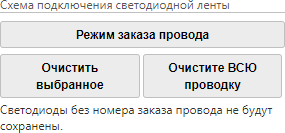
- Выберите светодиод на сетке
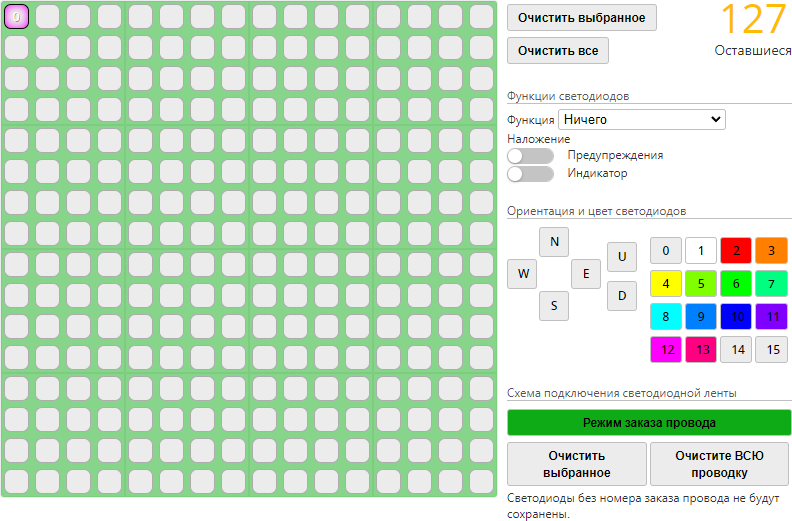
- Выберите функцию и назначьте опции, для каждой функции они разные.
- Выйдете из Режима заказа провода, нажав на кнопку еще раз.
Светодиодная лента может служить не только как украшение борта, но и как индикатор различных параметров, а также знаком отличия за счет цвета. Для светодиодной ленты доступны функции.
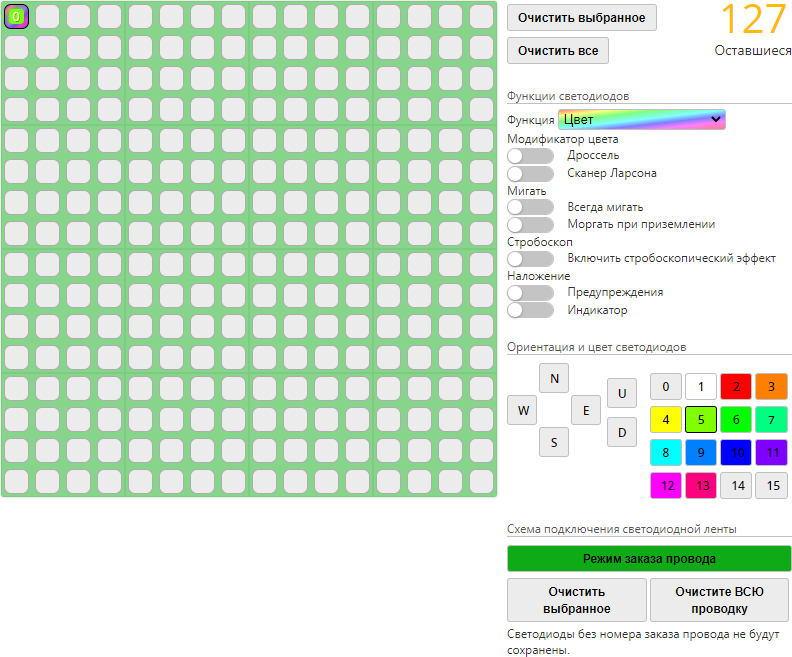
Функции светодиодной ленты:
Цвет. Позволяет настроить цвет светодиодов.
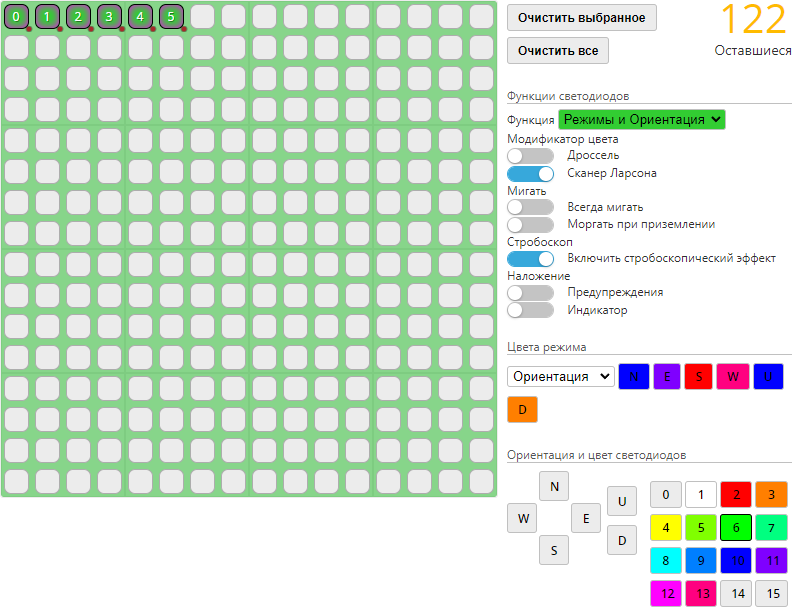
Режимы и Ориентация. Осуществляет индикацию направления воздушного судна в зависимости от режима.
Состояние запуска. Позволяет настроить индикацию состояния запуска, например, красный ‒ DISARM, зеленый ‒ ARM.
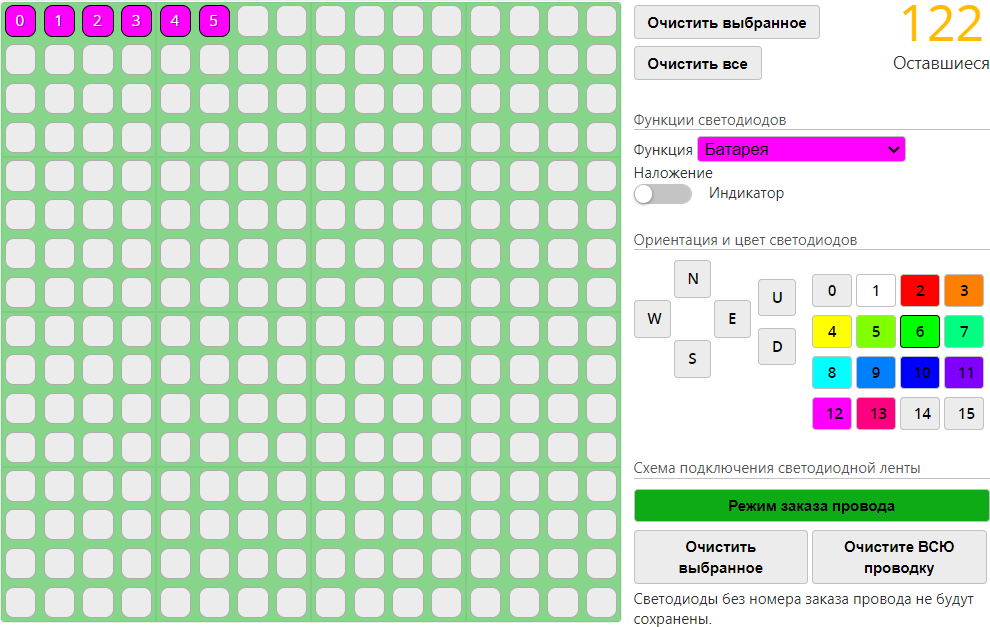
Батарея. Позволяет отображать уровень заряда АКБ, от зеленого к красному.
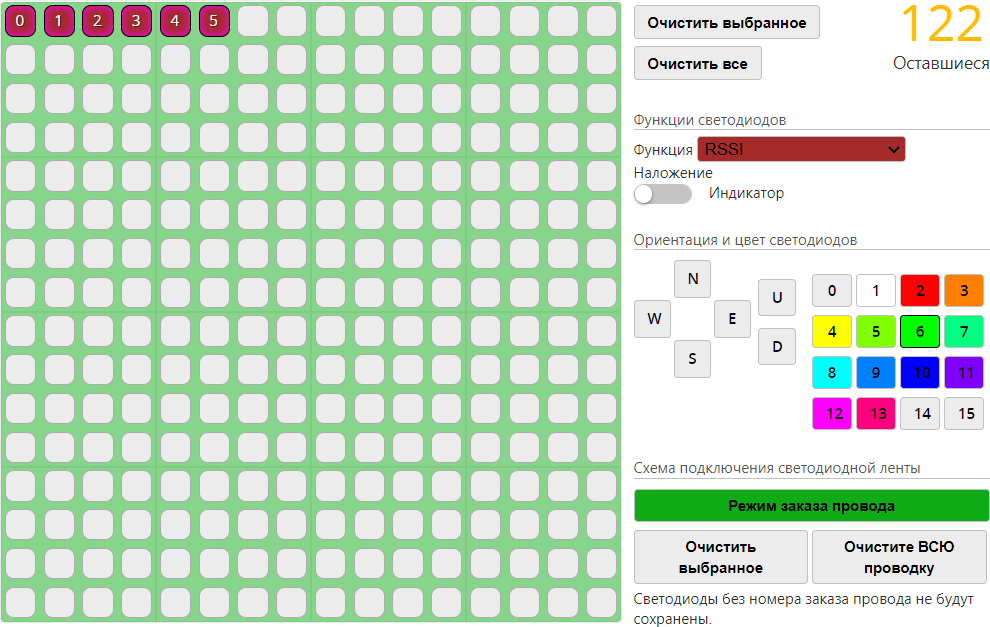
RSSI. В этом режиме цвет и частота мигания светодиодов привязаны к уровню RSSI. При достижении RSSI ниже 50% светодиоды будут мигать медленно, а при достижении RSSI ниже 20% — быстро.
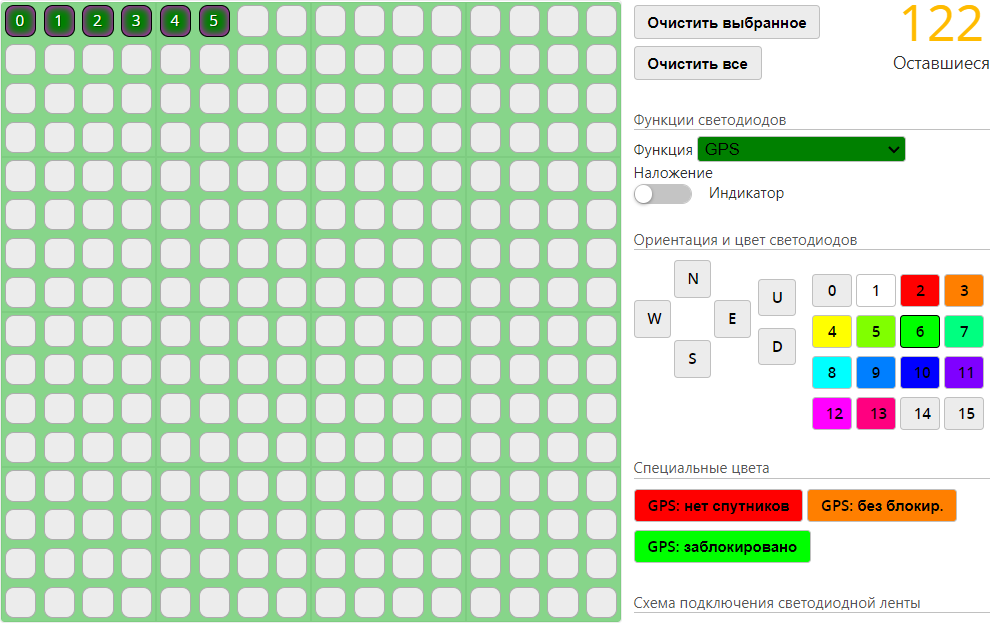
GPS. Режим GPS отображает состояние сигнала GPS. Светодиоды будут мигать столько раз, сколько найдено спутников.
Кольцо. Данный режим используется для настройки светодиодных
колец, они отображают уровень дроссельной заслонки, загораясь по кругу.
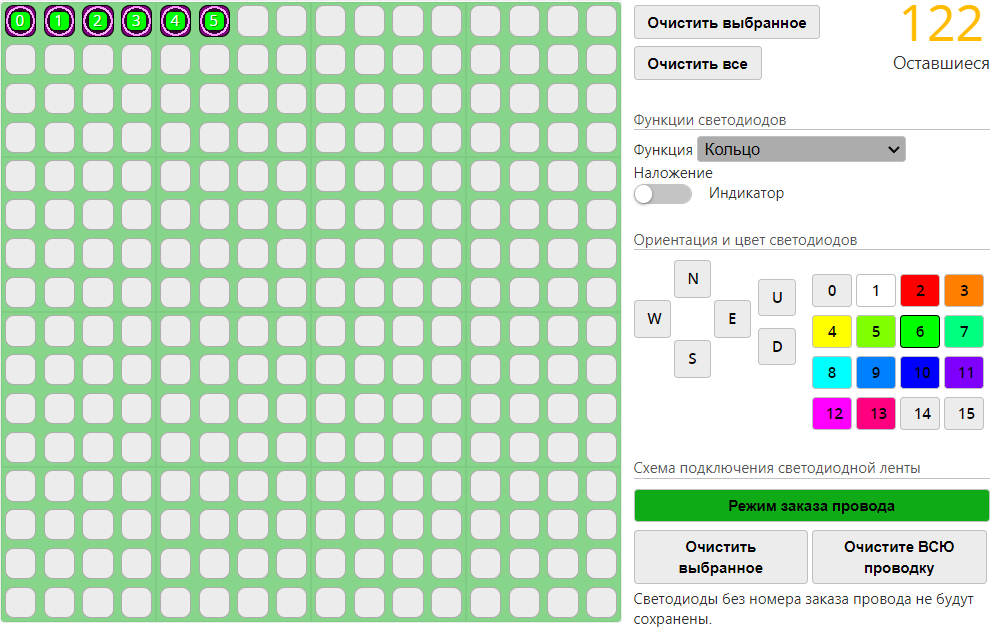
Дополнительные функции:
Дроссель ‒ отображение уровня газа.
Сканер Ларсона ‒ визуальный эффект, обычно представленный в виде светодиодной полосы, на которой светящаяся точка или полоса перемещается из стороны в сторону, затем возвращается назад.
Всегда мигать ‒ светодиоды поочередно мигают черным и текущим цветом.
Моргать при приземлении ‒ мигание активируется, когда газ менее 50%.
Включить стробоскопический эффект ‒ проявляется в виде видимого мерцания или прерывистого свечения, которое возникает из-за быстрого изменения интенсивности света.
Предупреждения ‒ в данном режиме светодиоды мигают согласно предупреждениям.
| Предупреждения | Реакция светодиода | Примечания |
|---|---|---|
| Блокировка ARM | мигание поочередно черным и зеленым | Калибровка или ошибка положения воздушного судна |
| Низкий заряд батареи | мигание поочередно черным и красным | |
| Ошибка оборудования | мигание поочередно черным и синим | Неисправность элементов схемы, проверьте подключение датчиков |
| Failsafe | мигание поочередно голубым и желтым | Для действия режима должна быть активирована отказоустойчивость |
Индикатор ‒ светодиоды отображают направление движения в соответствии с собственным расположением.
После настройки нажмите «Сохранить» для внесения изменений.

Датчики
Подробнее
Вкладка Датчики выводит графики показаний датчиков.
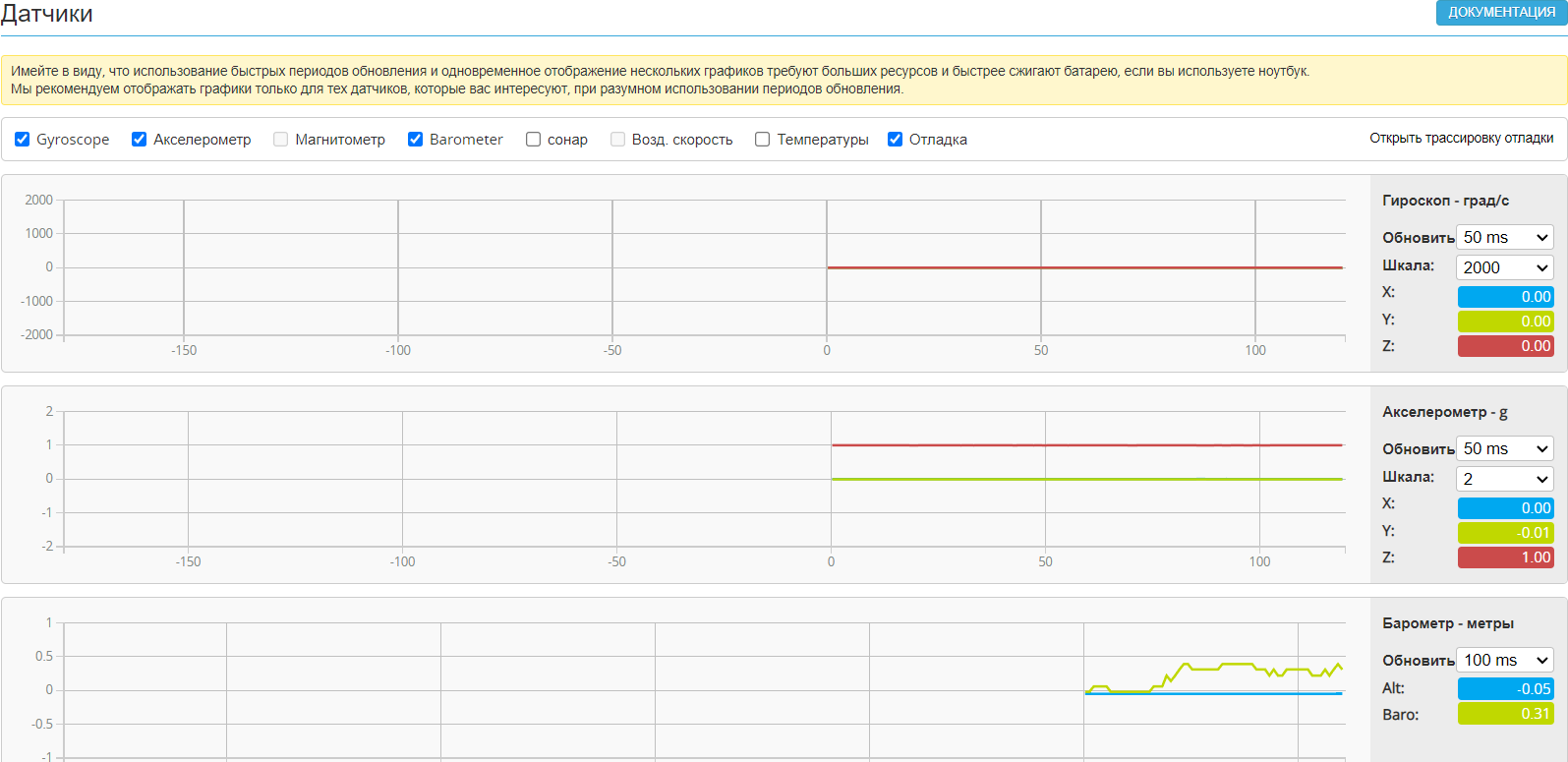
Для отображения доступны: Гироскоп, Акселерометр, Магнитометр, Барометр, Сонар, Воздушная скорость (трубка Пито или приемник воздушного давления ПВД), Температуры, Отладка (Debug). Чтобы включить график, поставьте галочку напротив нужного датчика.
Для каждого датчика доступны параметры:
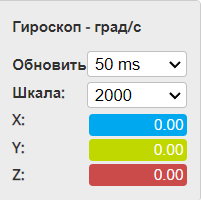
Частота обновления.
Шкала.
Отображаются значения по осям.
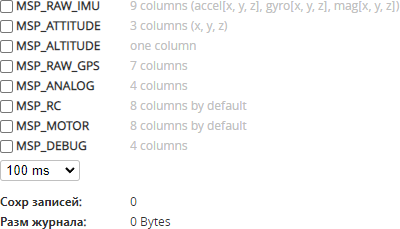
В режиме отладки доступны несколько режимов вывода значений. Они настраиваются с помощью командной строки.
Введите команду:
getdebug_mode
В командной строке отобразится текущий режим отладки и доступные режимы. Для отслеживания датчика оптического потока выберите FLOW_RAW.
В Датчиках можно посмотреть правильность получаемых данных и, например, отследить, правильно ли установлен датчик оптического потока.
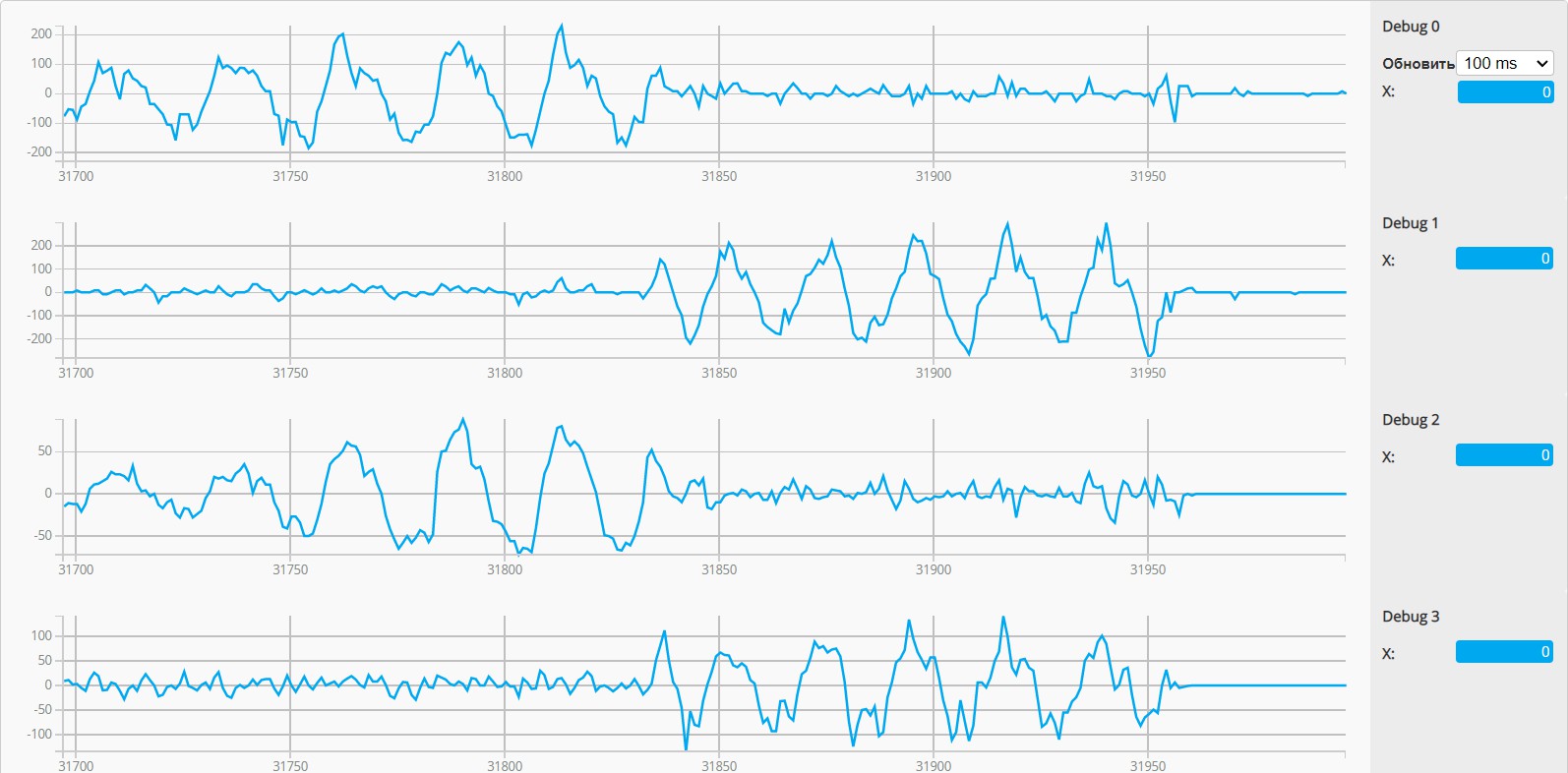
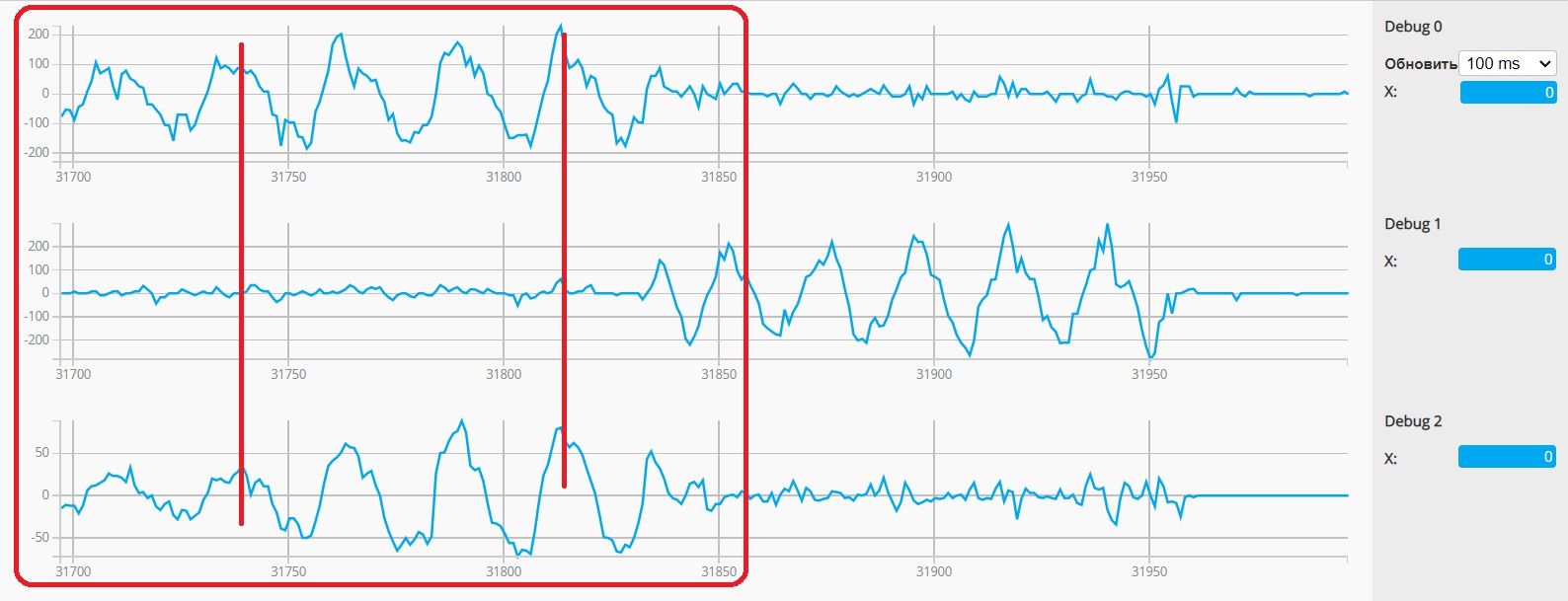
Чтобы проверить работу датчика оптического потока, необходимо поднять его на небольшую высоту и перемещать по осям X и Y, учитывая наклон, грубо говоря, симулируя реальный полет. Графики Debug 0 и Debug 2 отвечают за ось X (тангаж). Если датчик работает правильно, их данные будут совпадать.
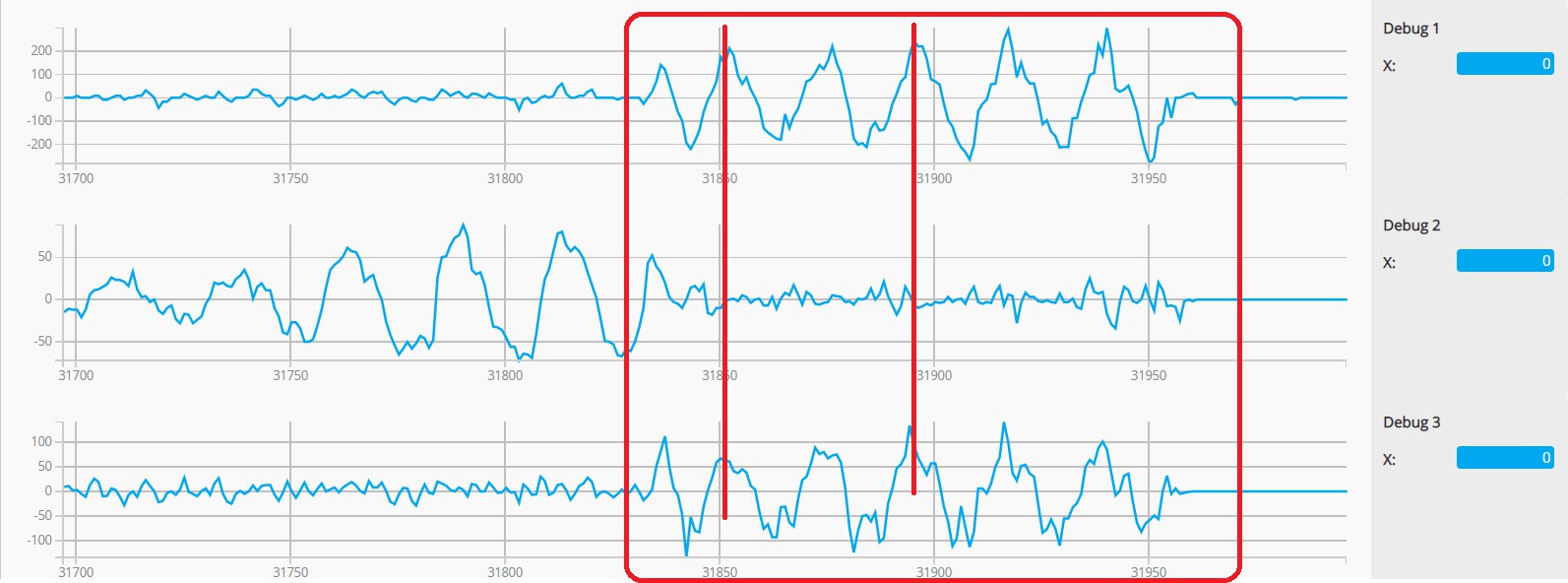
Графики Debug 1 и Debug 3 отвечают за ось Y (крен) и тоже должны совпадать.
Логирование
Подробнее
Здесь происходит логирование в файл csv и сразу же доступен просмотр «сырых» данных. Такой формат логирования полезен для настройки дрона на стендах, чтобы сразу обнаруживать помехи, вибрации и прочее.
После настройки выберите файл журнала и начните логирование. Логирование доступно только во время подключения полетного контроллера к Конфигуратору ‒ по проводу или по wi-fi.
Черный ящик
Подробнее
Blackbox ‒ это устройство, которое записывает данные во время полета.
Черный ящик записывает следующие показатели:
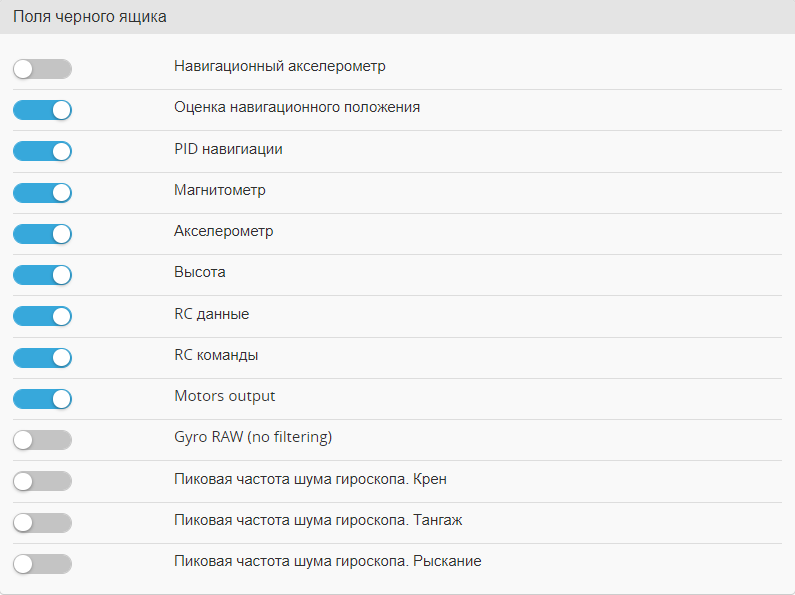
Отключите полетный контроллер от источников питания (компьютер и АКБ) и вставьте в него SD карту. Включите запись данных, переместив ползунок и нажмите «Сохранить и перезагрузить».
Выберите устройство регистрации: для SD-карт On-board SD card slot.
Выберите частоту записи данных. Частота зависит от объема память SD-карт. Для воздушных судов в основном используют SD-карты на 8-16 Гб, для таких карт подходит частота записи 1/32 (3%).
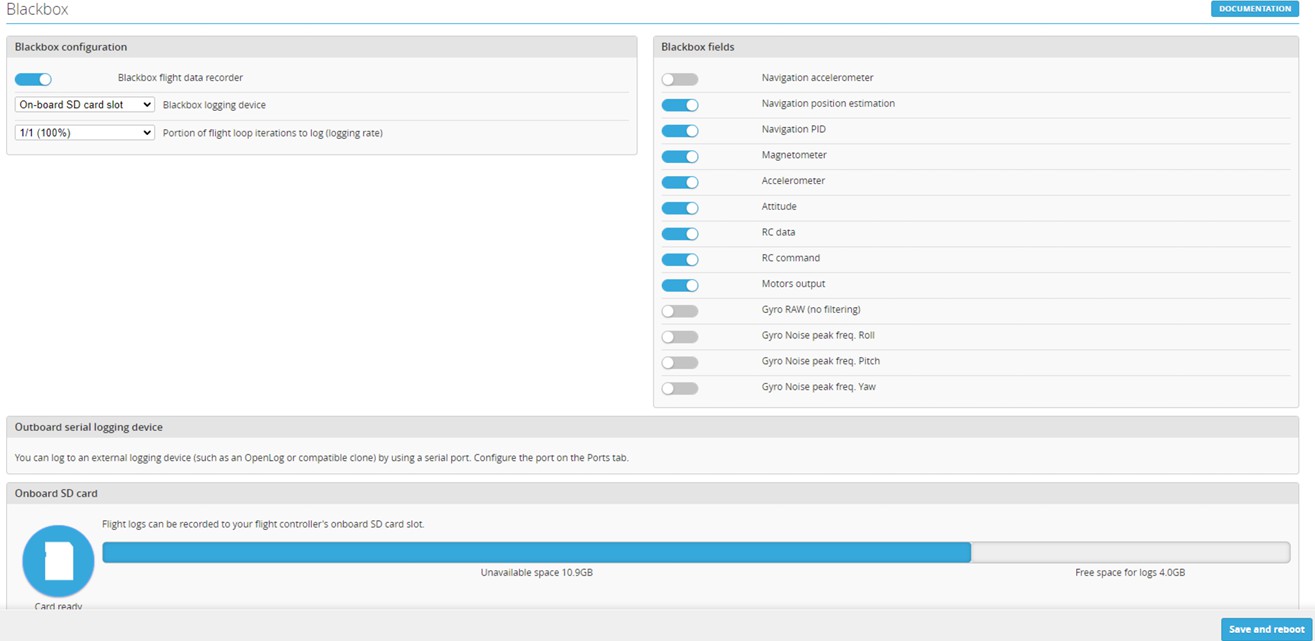
После настройки нажмите «Сохранить и перезагрузить» для внесения изменений.
Командная строка
Подробнее
Вкладка командная строка заменяет собой все описанные выше вкладки. Здесь можно настроить все параметры и найти дополнительные.
Обратите внимание
что при переходе из Командной Строки в другую вкладку будет перезагрузка.
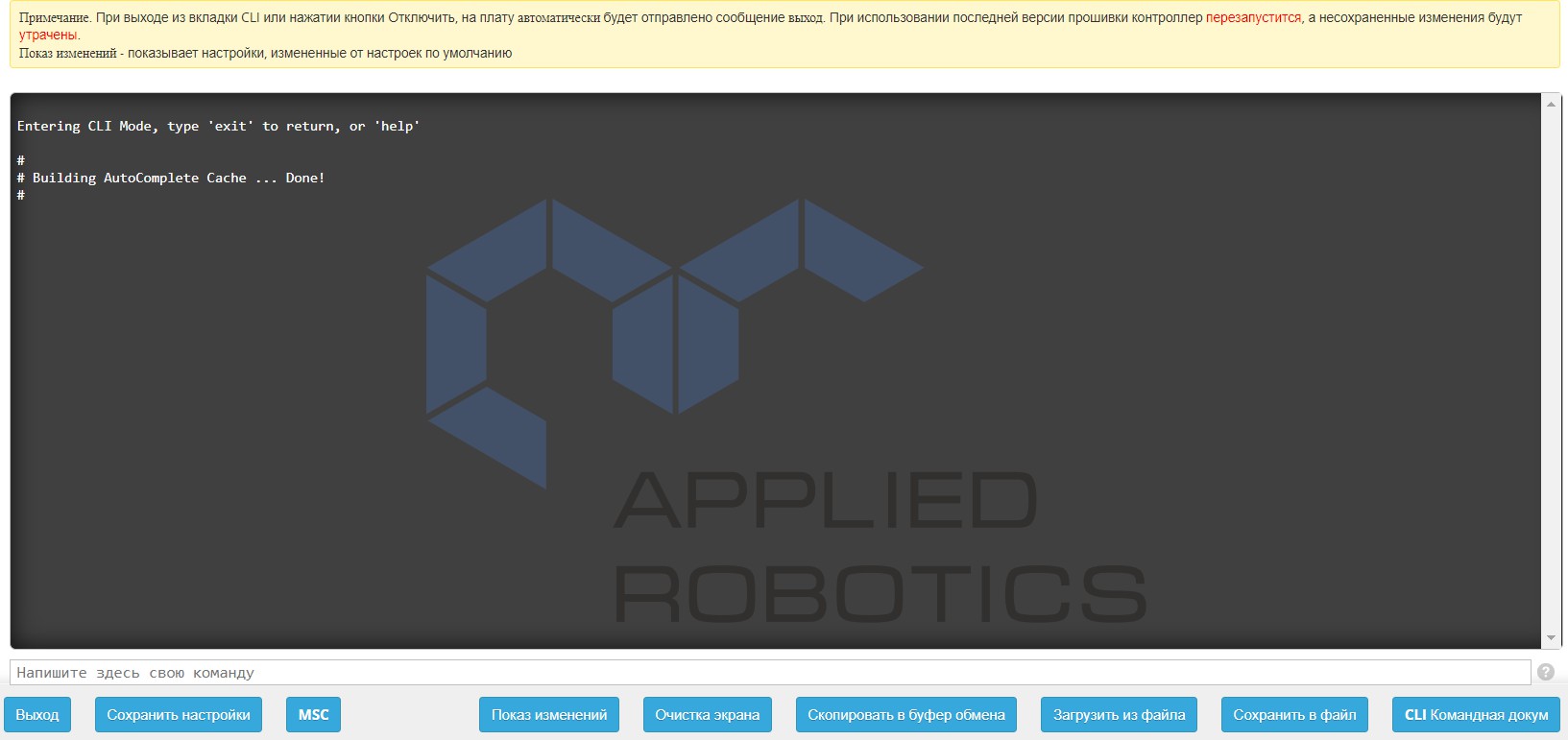
Для вывода функций введите команду:
help
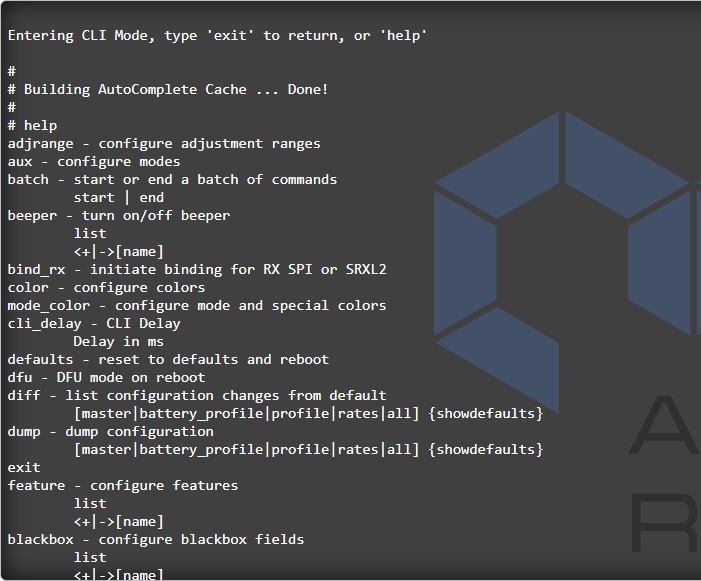
Важные функции командной строки:
Сохранить все измененные параметры ‒ diff-файл, готовый профиль с настройками дрона.
Сохранить все параметры ‒ dump-файл.
Загрузить файл с настройками полетного контроллера ‒ diff или dump файл.
Перед тем как загрузить готовые настройки необходимо сбросить те настройки, которые уже есть в полетном контроллере, для этого введите
команду:
Перед загрузкой настроек снимите пропеллеры или отключите АКБ.
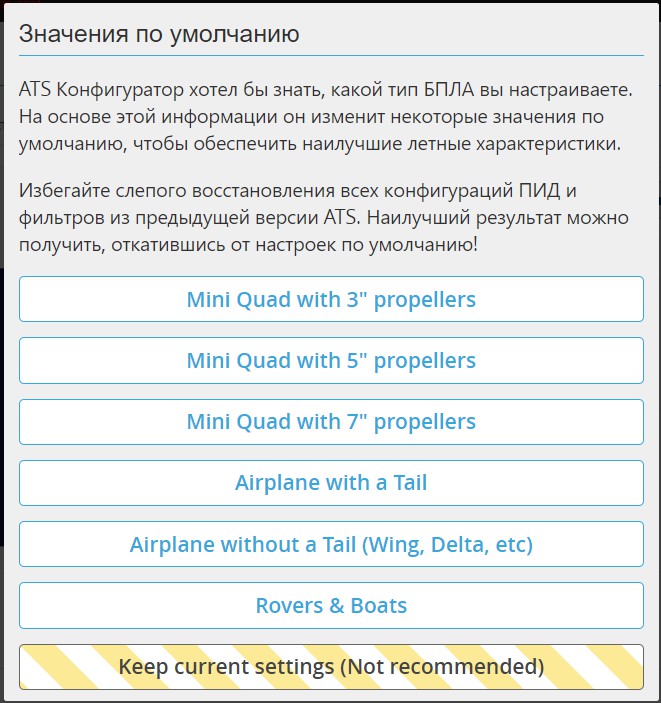
defaults
После этого дождитесь перезагрузки, теперь на полетном контроллере нет никаких настроек, он даже не знает, какого он типа воздушное судно. После перезагрузки появятся Пресеты (автоматические настройки), выберите «Keep current settings».
Снова зайдите во вкладку Командная строка и загрузите файл.