Глава 1. Предварительная подготовка БВС
Вся установка и работа производится на квадрокоптере ARA EDU.
Рисунок 1.1. Квадрокоптер ARA EDU
Для обеспечения стабильной работы «квадрокоптер ARA EDU+ TrackingCam3» требуется выполнить последовательную инициализацию всех подсистем.
Алгоритм предполетной подготовки квадрокоптера и TrackingCam3:
Обновление ПО полетного контроллера;
Настройка параметров полетного контроллера;
Обновление образа TrackingCam3
Настройка DXL устройств (модулей)
1.1 Обновление ПО полетного контроллера
Проведите обновление ПО полетного контроллера. Обратите внимание, ниже представлено обновление и ссылки для 8 версии конфигуратора.
Создайте папку, где будет храниться приложение для обновления и прошивка.
Скачайте приложение для обновления (файл с расширением .exe) в соответствии со своей операционной системой в ранее созданную папку
https://github.com/AppliedRobotics/ARA-EDU/tree/main/ARA-Edu-update/update_gui

Рисунок 1.2. Страница GitHub с обновлением ПО полетного контроллера

Рисунок 1.3. Приложение для обновления ПО полетного контроллера
- Скачайте файл прошивки в туже папку
https://github.com/AppliedRobotics/ARA-EDU/tree/main/ARA-Edu-bin

Рисунок 1.4. Страница GitHub с обновлением прошивки полетного контроллера
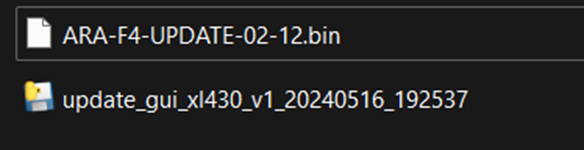
Рисунок 1.5. Актуальное название прошивки полетного контроллера
- Переименуйте прошивку в out и проверьте, что расширение файла .bin (см. рис. 1.6).
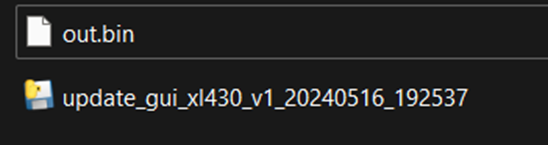
Рисунок 1.6. Содержание папки для обновления полетного контроллера
- Запустите приложение
Для Windows: двойным кликом мыши;
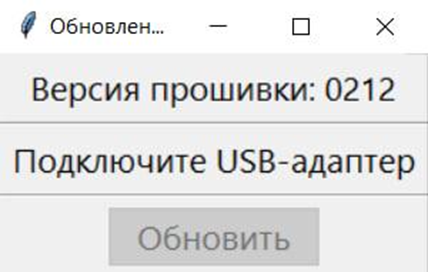
Рисунок 1.7. Приложение для обновления прошивки полетного контроллера
Для Linux: двойным кликом мыши, если при этом приложение не запускается, выполните следующие действия:
● Откройте терминал в папке расположения файлов;
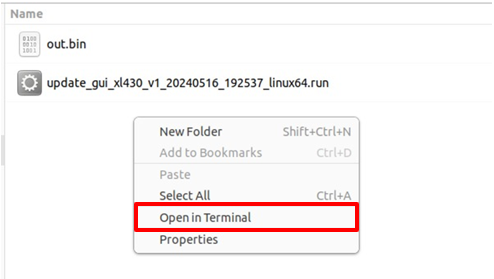
Рисунок 1.8. Открытие терминала в папке с приложением
● Введите сначала команду — это активирует файл приложения для дальнейшего запуска:
chmod +x «название файла»
● Затем введите команду — это запустит приложение для обновления:
./«название файла»

Рисунок 1.9. Команды запуска приложения в Linux
● Приложение откроется.

Рисунок 1.10. Приложение для прошивки полетного контроллера
- Подключите полетный контроллер к компьютеру с помощью провода micro USB. После этого в приложении появится сообщение, что устройство найдено. Обратите внимание, если полетный контроллер содержит ту же прошивку, что хранится в папке обновления, приложение не обнаружит устройство.
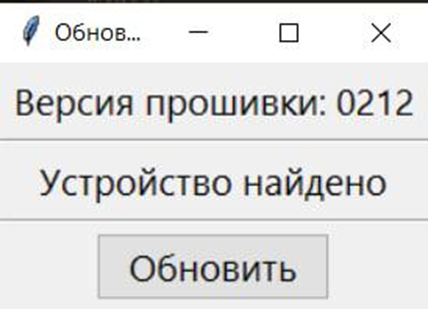
Рисунок 1.11. Внешний вид приложения для прошивки полетного контроллера после подключения полетного контроллера к компьютеру
- Нажмите кнопку «Обновить» и дождитесь окончания загрузки (первое число в версии прошивки будет на 1 больше второго).
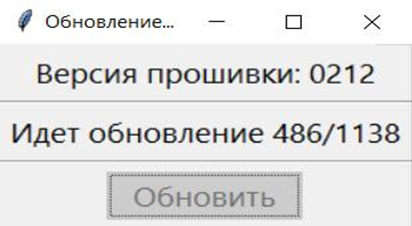
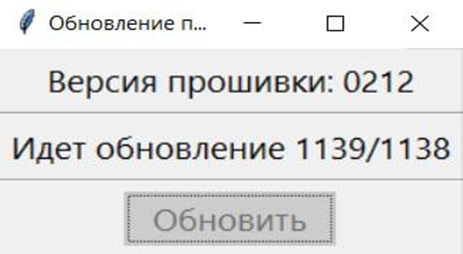
Рисунок 1.12. Внешний вид приложения для прошивки полетного контроллера в процессе и после обновления полетного контроллера
- После завершения обновления отключите провод USB.
1.2 Настройка параметров полетного контроллера
- Обновите прошивку полетного контроллера в соответствии с версией конфигуратора, на которую обновлен полетный контроллер. Данные параметры расположены по ссылке:
https://github.com/AppliedRobotics/ARA-EDU/tree/main/ARA-Edu-diff-tc3
Скачайте файл
Перейдите во вкладку конфигуратора “Командная строка”
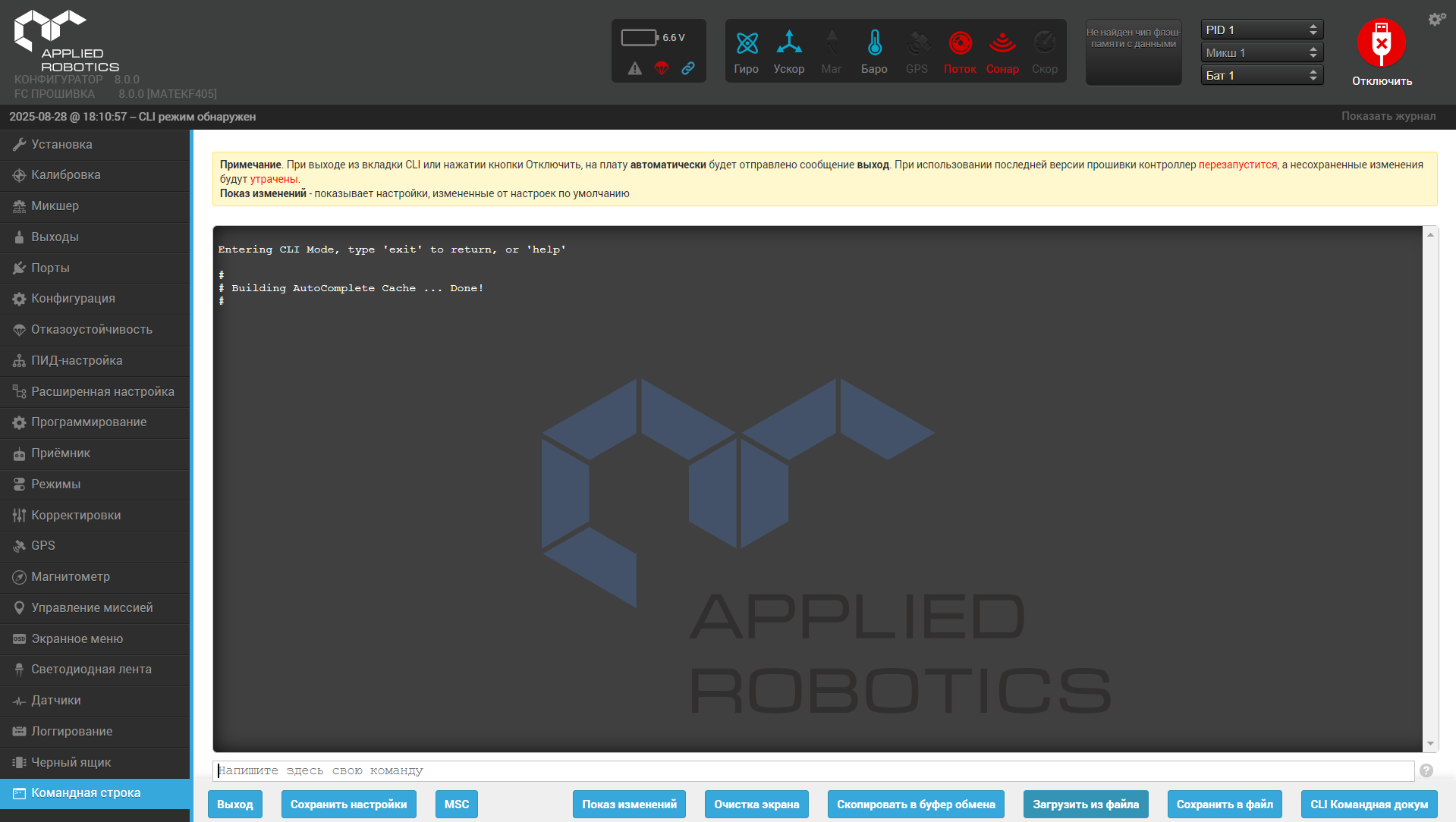
Рисунок 1.13. Вкладка “Командная строка” конфигуратора полетного контроллера
Нажмите кнопку “Загрузить из файла” и выберете скачанный файл.
Рисунок 1.14. Выбор diff-файла
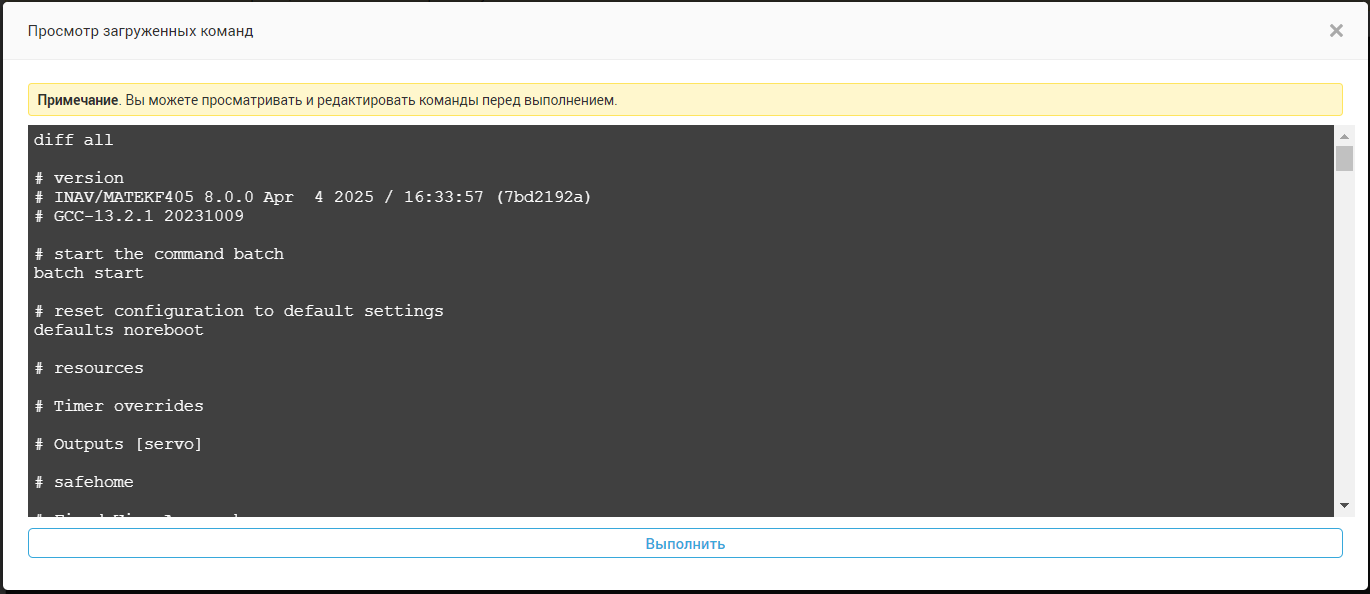
Рисунок 1.15. Просмотр загруженных команд после выбора diff-файла
В открывшемся окне нажмите кнопку “Выполнить”. Дрон перезагрузится и на полетный контроллер будут записаны новые настройки.
- Перейдите во вкладку “Калибровка” и выполните калибровку Optical Flow. Нажмите на кнопку “Калибровка потока”.
Полученное значение должно быть в диапазоне от 3 до 5 (рисунок 1.16).


Рисунок 1.16. Результаты калибровки датчика Optical Flow
- Проверьте верную настройку пульта управления в соответствии с рисунком 1.17.
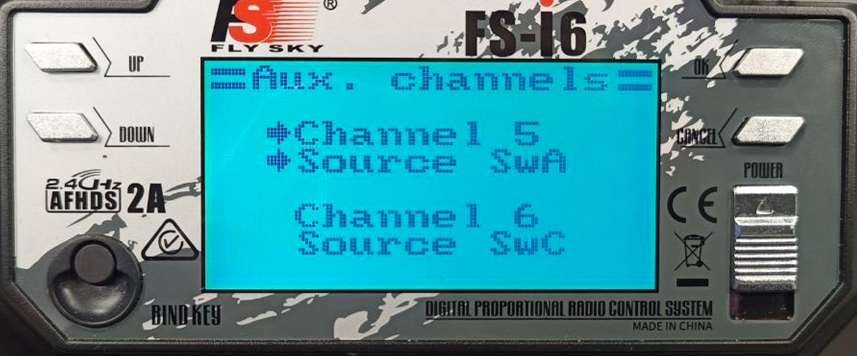
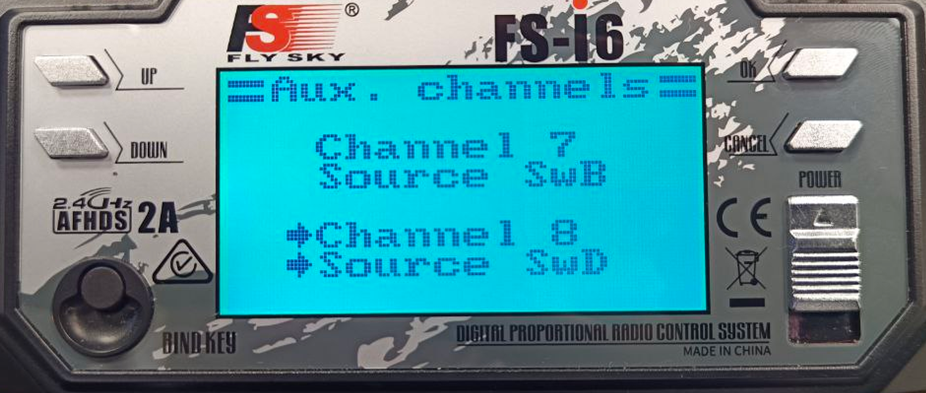
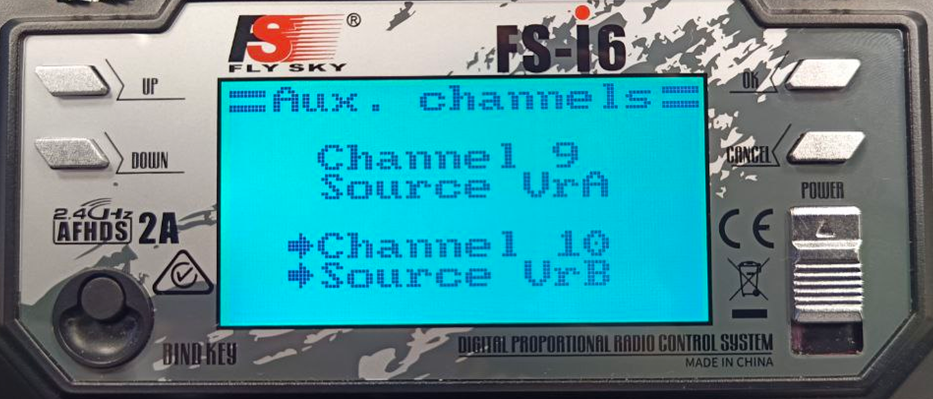
Рисунок 1.17. Проверка настройки пульта
- Проверьте стабильную работу режимов удержания высоты и позиции (AltHold и PosHold). Для этого проверьте наличие этих режимов в конфигураторе во вкладке «Режимы» (Modes).

Рисунок 1.18. Пример верной настройки режимов полета
- Если есть необходимость изменить базовые настройки режимов удержания высоты и позиции ARA EDU, это можно сделать в Конфигураторе, вкладка «ПИД-настройка» (PID-tuning). Чтобы открыть ПИД-регуляторы для режимов AltHold и PosHold, перейдите во вкладку «Дополнительные коэффициенты PID».

Рисунок 1.19. Пример настройки ПИД-регулятора
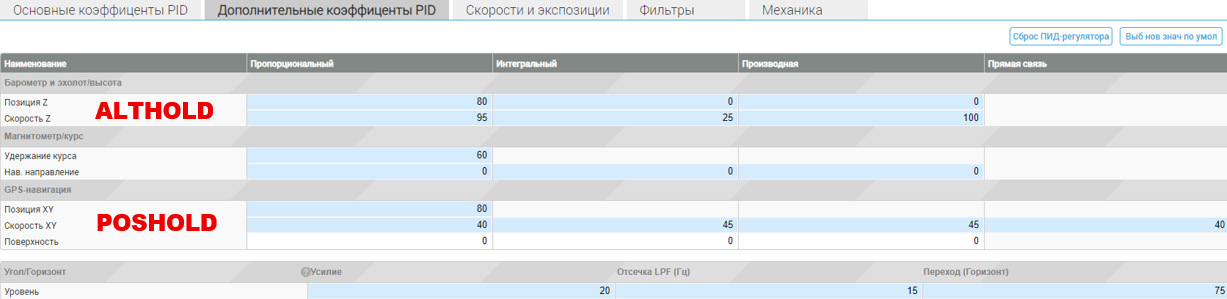
Рисунок 1.20. Пример настройки ПИД-регулятора для режимов AltHold и PosHold
Обратите внимание
настройка ПИД-регуляторов - долгий и нелегкий процесс, требующий аккуратности.
- Чтобы камера могла коммуницировать с полетным контроллером, необходимо активировать 5-ый последовательный порт. Для этого перейдите в Конфигураторе во вкладку «Порт» (Ports) и активируйте UART5. После нажмите «Сохранить и перезагрузить» (Save and Reboot).
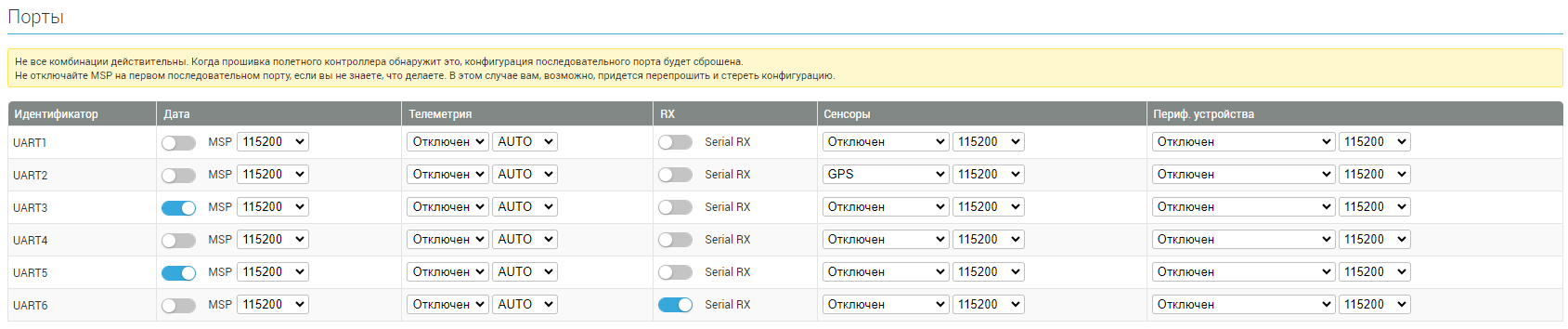
Рисунок 1.21. Настройка портов полетного контроллера
- Перейдите во вкладку «Командная строка» (CLI) и введите команду, указывающую скорость работы порта. Обратите внимание, что отсчет портов начинается с нуля, поэтому для пятого порта в команде указывается число четыре.
Введите команду и нажмите ENTER:
serial 4 1 1000000
где 4 - номер порта, 4 так как отсчет начинается с 0
1 - тип подключения (MSP)
1000000 - баудрейт
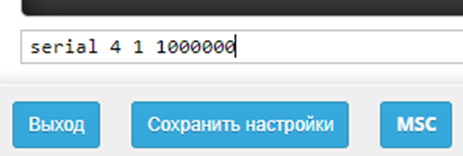
Рисунок 1.22. Ввод команды во вкладке “Командная строка”
- Если терминал не вывел никаких ошибок, введите команду save и нажмите ENTER. Дождитесь перезагрузки полетного контроллера. После перезагрузки, проверьте, что 5 порт остался активированным.
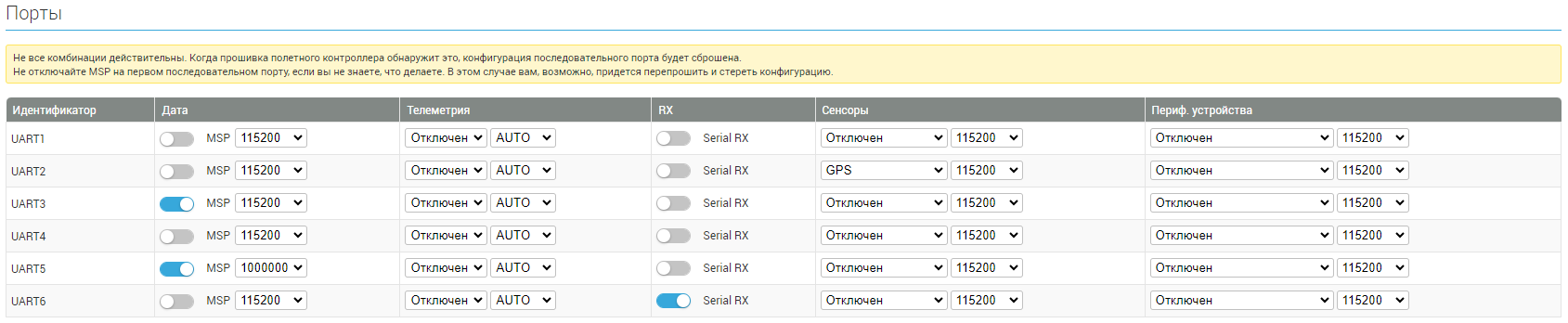
Рисунок 1.23. Проверка портов полетного контроллера после изменения скорости обмена данными 5 порта
На этом настройка полетного контроллера окончена. Следующий этап - обновление образа на TrackingCam3.
1.3 Подготовка и настройка TrackingCam3
1.3.1 Обновление образа TrackingCam3
- Скачайте файл обновления камеры по ссылке:
Чтобы обновить образ камеры, подключитесь к ней через провод miniUSB;
Зайдите в управляющий интерфейс камеры: http://trackingcam3.local:9999 , либо по IP: http://192.168.42.1:9999;
В открывшемся окне введите логин root и пароль 12345 и нажмите «Войти»;
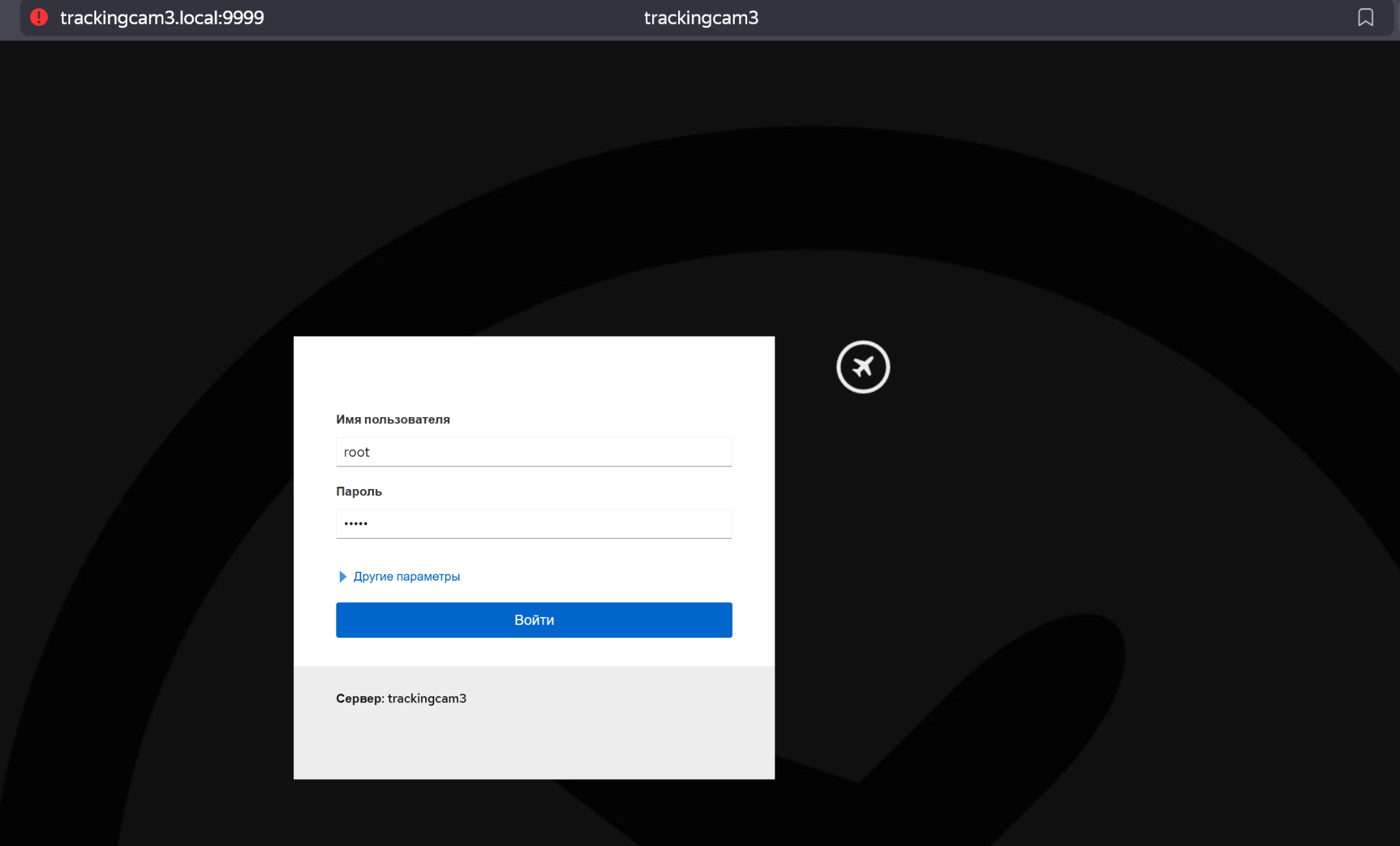
Рисунок 1.24. Окно ввода логина и пароля для доступа к управляющему интерфейсу камеры
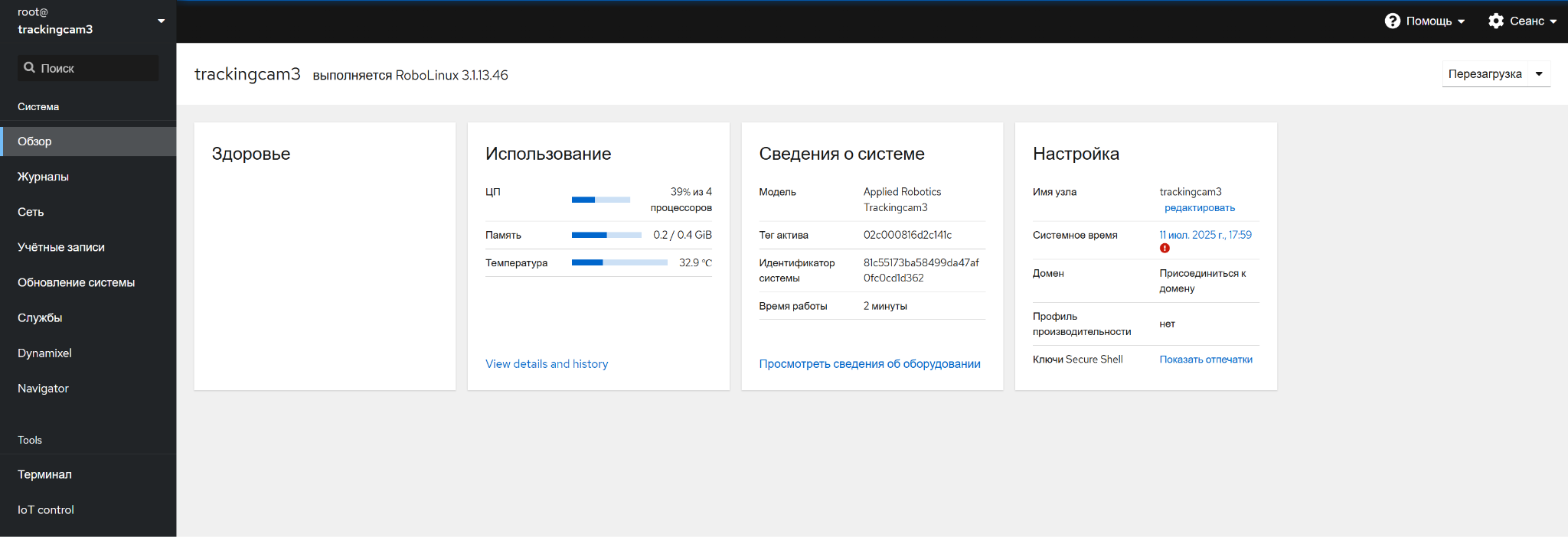
Рисунок 1.25. Обзор управляющего модуля TrackingCam3
- Перейдите во вкладку «Сеть» и настройте камеру на подключение к внешней сети. Для настройки Wi-Fi нажмите на интерфейс wlan0.
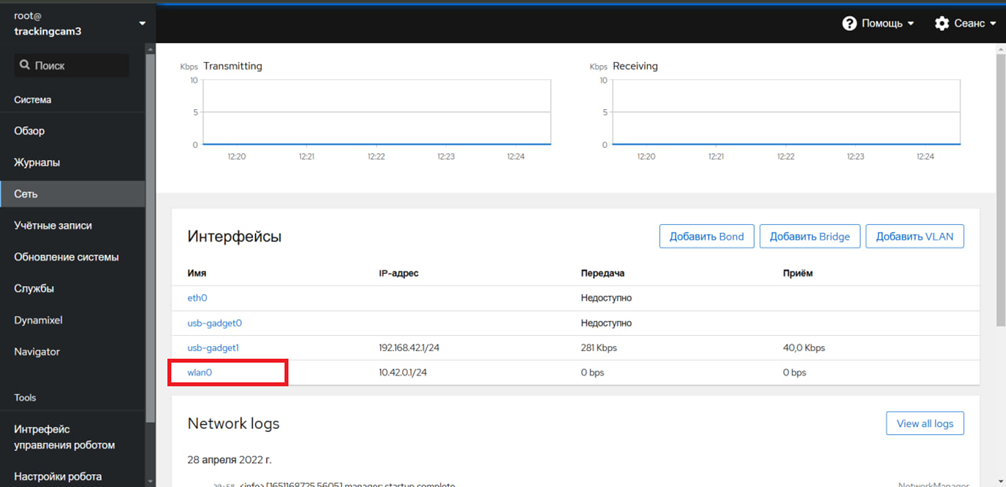
Рисунок 1.26. Настройка сети
Здесь происходят настройки сети дрона. Сеть используется в двух режимах: точка доступа и подключение внешней сети.
- Нажмите «Редактировать» напротив Wi-Fi.

Рисунок 1.27. Wi-Fi соединение для модуля TrackingCam3
- Выберите режим «Клиент». Далее введите название сети Wi-Fi и пароль, используемой в вашем рабочем пространстве.
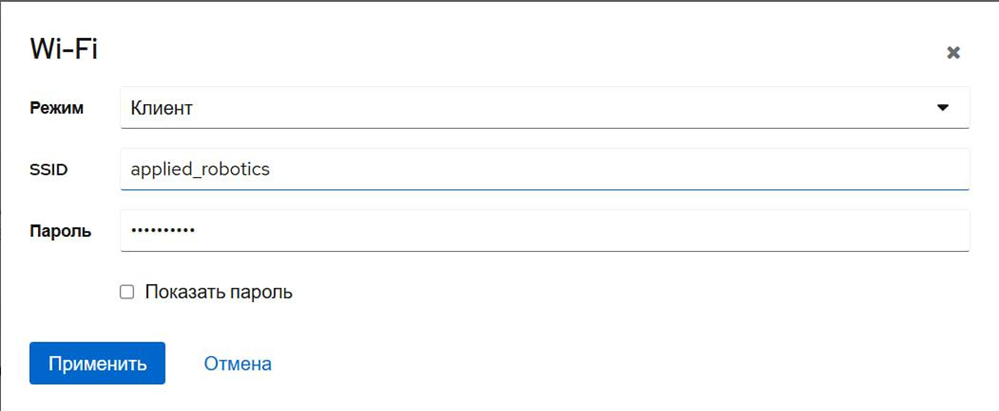
Рисунок 1.28. Вход в режим “Клиент” Wi-Fi соединения модуля TrackingCam3
- Нажмите «Применить». При успешном подключении к сети произойдет изменение графиков.

Рисунок 1.29. Графики передачи данных модуля TrackingCam3
- Перейдите во вкладку «Navigator»;
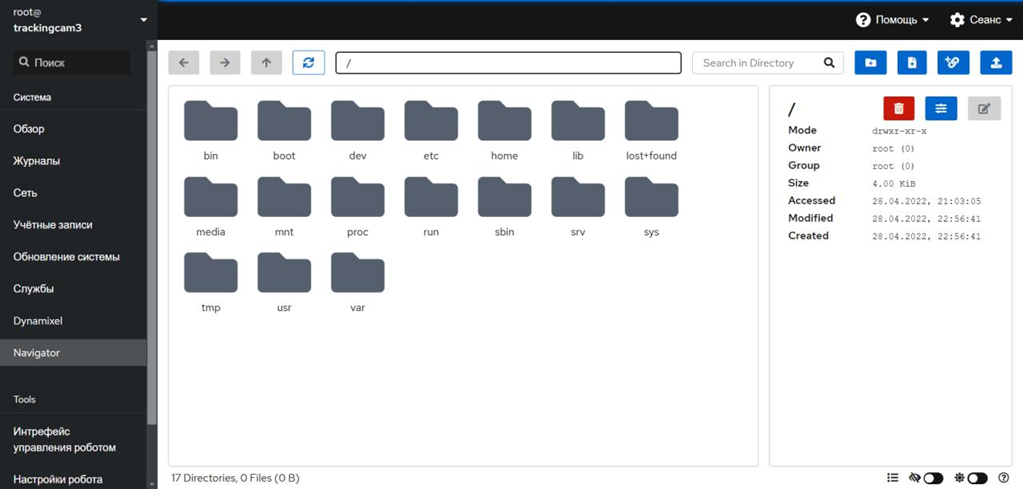
Рисунок 1.30. Файловая система модуля TrackingCam3
- В адресной строке введите путь home/root и перейдите в данную папку;

Рисунок 1.31. Путь к папке root в файловой системе модуля TrackingCam3
- Загрузите файл обновления в данную папку:
● Нажмите кнопку «Upload Files» и выберите скачанный файл

Рисунок 1.32. Загрузка файла для обновления прошивки модуля TrackingCam3
● Или перетащите файл из Проводника в область настройки TrackingCam3
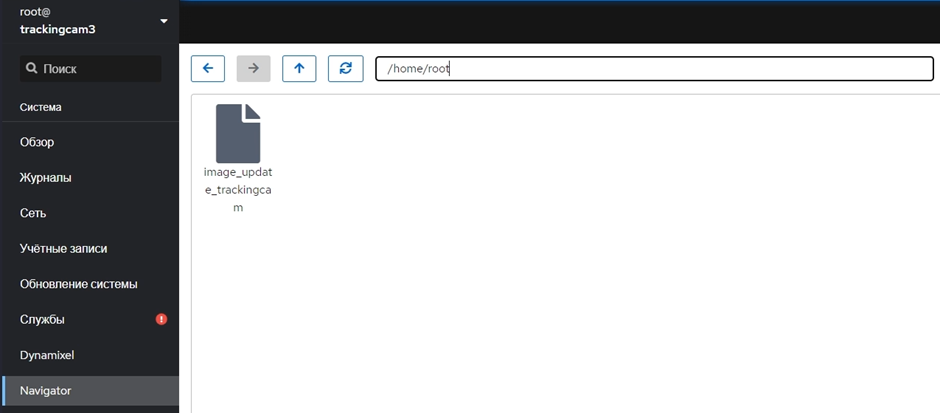
Рисунок 1.33. Файл обновления в папке root
- Перейдите во вкладку «Терминал»;
Рисунок 1.34. Командная строка модуля TrackingCam3
- В Терминале с помощью команд cd и ls проверьте, что камера подключена к сети и терминал открыт в нужной папке.
cd - команда переместит консоль в папку /home/root
ls - команда отобразит содержимое в текущей папке
Рисунок 1.35. Командная строка модуля TrackingCam3
- После проверки введите команду запуска файла:
./image_update_trackingcam -u
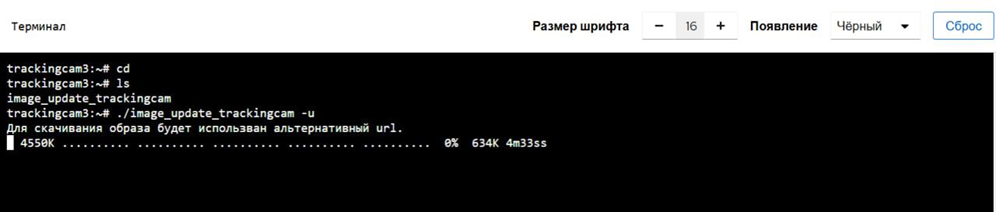
Рисунок 1.36. Загрузка обновления модуля TrackingCam3
- После ввода команды начнется загрузка актуальной версии обновления. Процесс обновления может занять до нескольких минут, после завершения модуль разорвет соединение. Подождите несколько минут и камера снова будет доступна для работы.

Рисунок 1.37. Загрузка обновления модуля TrackingCam3
- После обновления изменятся: версия ПО и активный слот
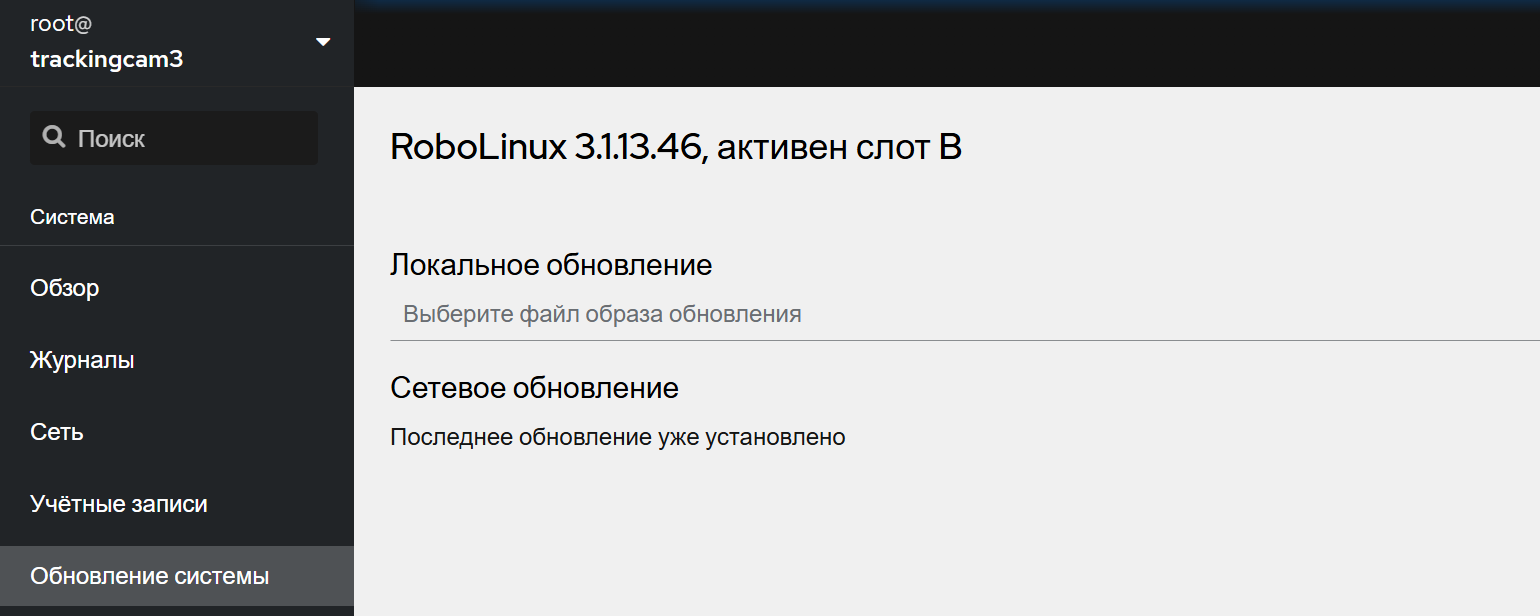
Рисунок 1.38. Обновленная версия прошивки модуля TrackingCam3
1.3.2 Настройка Wi-Fi сети БВС
После обновления образа необходимо выполнить настройки собственной Wi-Fi сети БВС.
Подключите камеру к компьютеру с помощью провода mini USB;
Зайдите в управляющий интерфейс камеры: http://trackingcam3.local:9999, либо по IP: http://192.168.42.1:9999 ;
В открывшемся окне введите логин и пароль;
Перейдите во вкладку «Сеть» и настройте камеру на подключение к внешней сети. Для настройки Wi-Fi нажмите на интерфейс wlan0.
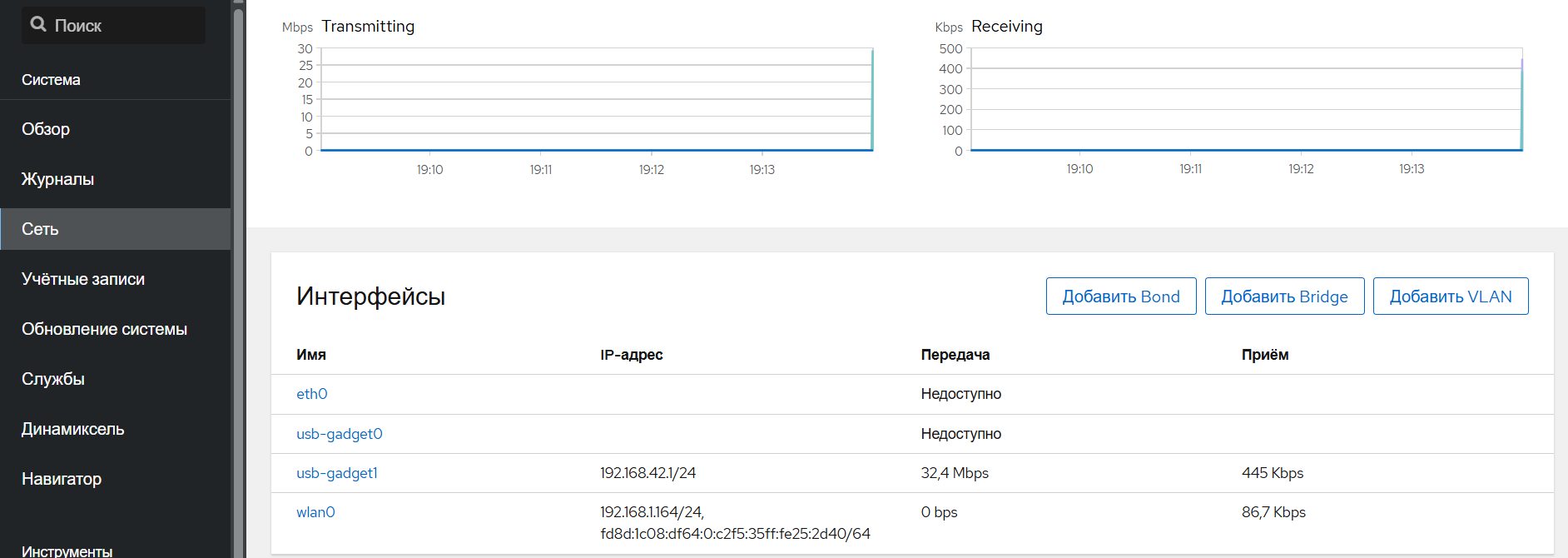
Рисунок 1.39. Вкладка «Сеть» управляющего интерфейса камеры
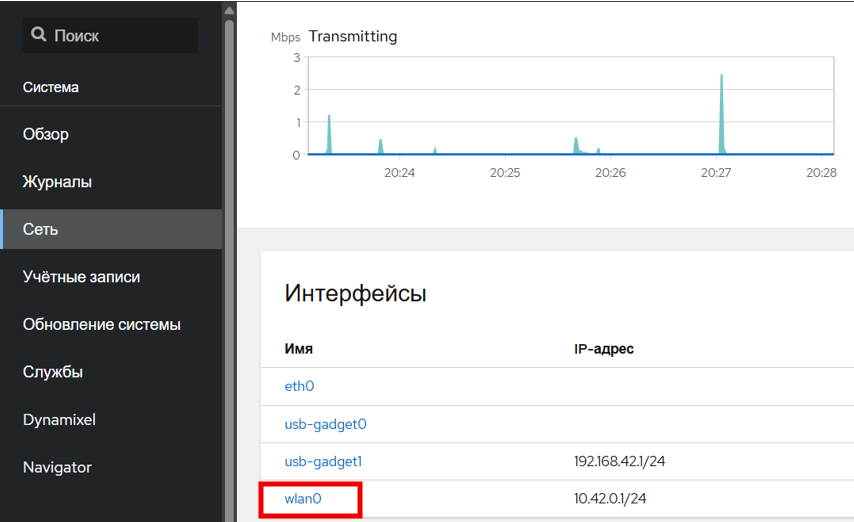
Рисунок 1.40. Интерфейс wlan0 для настройки Wi-Fi
Здесь происходят настройки сети камеры. Проверьте, чтобы состояние было активно.
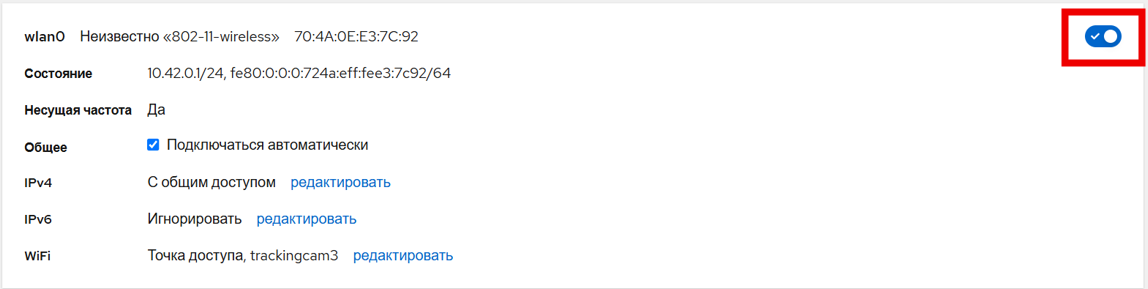
Рисунок 1.41. Настройки Wi-Fi
Сеть используется в двух режимах: точка доступа и подключение внешней сети.
Преимущество подключения к внешней сети заключается в том, что вы не теряете интернет-соединение при работе с камерой, однако если сеть перегружена, подключение к камере и получение информации будут долгими и затрудненными. В этом случае рекомендуется настроить сеть камеры в режиме точки доступа, это обеспечит более быструю связь с ней.
Нажмите «Редактировать» напротив Wi-Fi;
Рисунок 1.42. Редактирование Wi-Fi
- Настройка подключения в режиме точки доступа:
В качестве режима выберите точку доступа. Укажите уникальный идентификатор сети (SSID) и пароль для беспроводной сети, создаваемой камерой TrackingCam3.
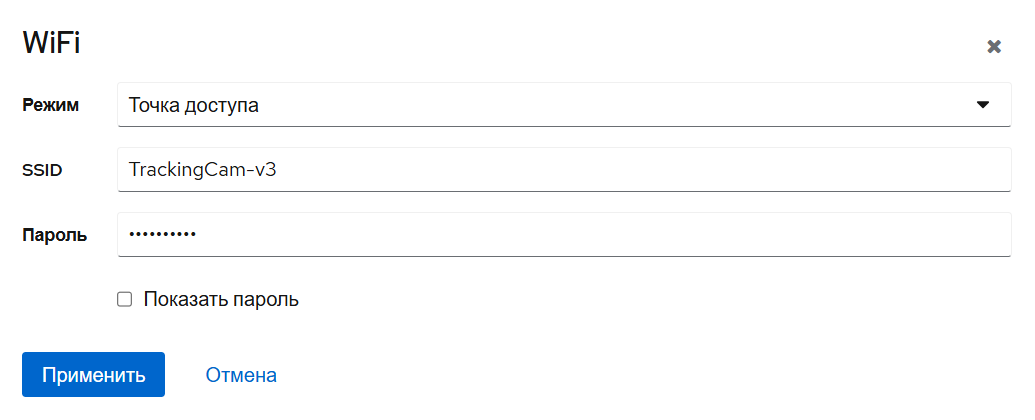
Рисунок 1.43. Настройка сети в режиме Точки доступа
Нажмите «Применить», чтобы сохранить изменения. После этого камера начнет раздавать Wi-Fi с заданными вами названием и паролем.
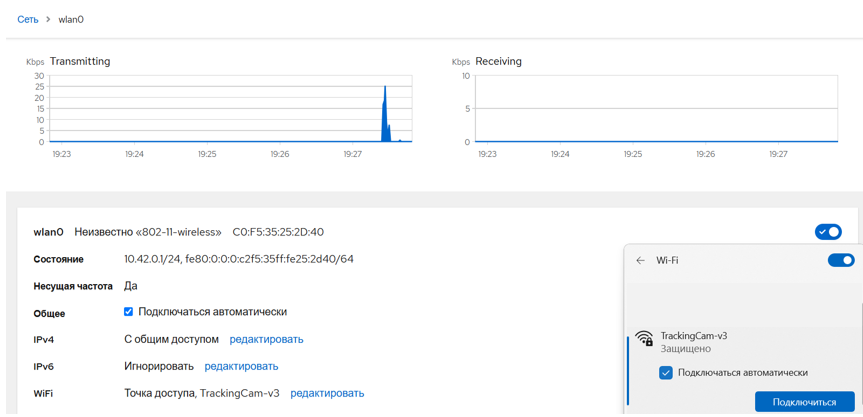
Рисунок 1.44. Собственная Wi-Fi сеть камеры
Внимание
Чтобы избежать путаницы при совместном использовании нескольких БВС одновременно – создавайте уникальные названия и не подключайте несколько БВС к одной сети.
- Настройка подключения в режиме подключения внешней сети:
В качестве режима выберите Клиент. Далее введите название сети Wi-Fi и пароль, используемой в вашем рабочем пространстве.
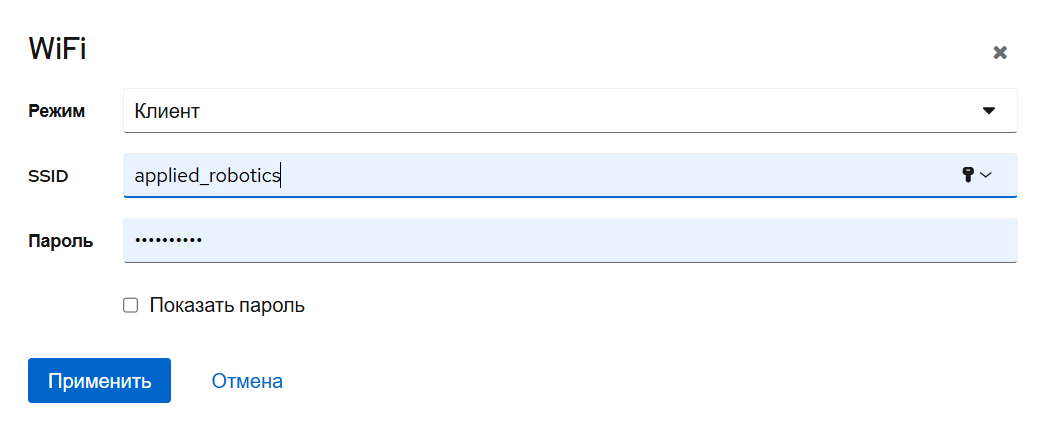
Рисунок 1.45. Настройка сети в режиме Клиент
Нажмите «Применить». При успешном подключении к сети произойдет изменение графика.

Рисунок 1.46. Изменение графика при успешном подключении к внешней сети
Чтобы избежать путаницы при совместном использовании нескольких БПЛА одновременно, не подключайте несколько БПЛА к одной сети, либо при подключении используйте IP-адрес камеры. Чтобы узнать его смотрите подраздел 1.3.2.
Внимание
Подключение по IP-адресу является приоритетным, если к сети подключено несколько камер, так как этот способ позволяет избежать неприятных последствий в виде подключения к чужой камере.
1.3.3 Подключение к Wi-Fi сети БВС
- Подключение ПК к собственной Wi-Fi сети камеры, когда камера находится в режиме Точки доступа:

Рисунок 1.47. Подключение к Wi-Fi сети модуля TrackingCam3
Для подключения выберите «Подключиться, используя ключ безопасности» (либо «Подключиться с помощью пароля») и введите установленный вами пароль.
Рисунок 1.48. Ввод пароля Wi-Fi соединения модуля TrackingCam3
- Подключение к сети вашего рабочего пространства, когда камера находится в режиме «Клиент»:
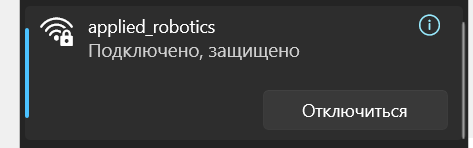
Рисунок 1.49. Подключение к внешней сети
1.3.4 Получение и изменение IP-адреса камеры
Чтобы узнать IP-адрес камеры:
Подключите камеру к компьютеру с помощью провода mini USB и зайдите в управляющий интерфейс камеры;
Перейдите в раздел “Сеть”.
usb-gadget – тут прописывается IP камеры при подключении к ней через USB провод.
Напротив wlan0 прописан IP камеры, который она имеет при настроенной Wi-Fi сети.
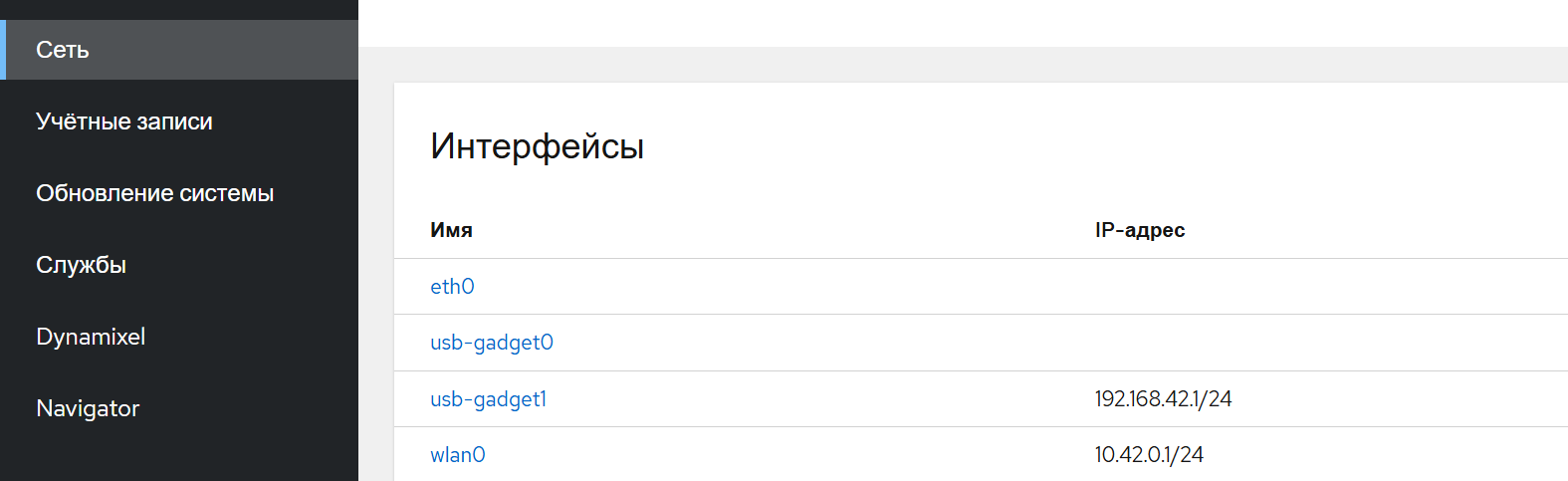
Рисунок 1.50. Переход в раздел “Сеть” в интерфейсе камеры
10.42.0.1 – это базовый IP камеры, когда камера находится в режиме Точки доступа.
Если камера находится в режиме «Клиент», IP-адрес будет другим. В этом режиме камера имеет уникальный IP-адрес в сети, и он всегда будет разным. Пример:
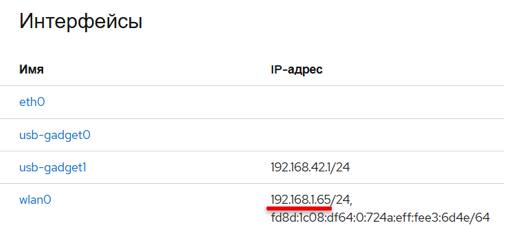
Рисунок 1.51. Пример IP-адреса камеры при настройке сети в режиме «Клиент»
При необходимости вы можете изменить IP-адрес камеры. Это доступно только в режиме Точки доступа.
Алгоритм изменения IP-адреса камеры:
Подключите камеру к ПК с помощью провода mini USB;
Зайдите в управляющий интерфейс камеры. Перейдите на вкладку «Сеть»;
Во вкладке «Сеть» перейдите в wlan0. Нажмите “Редактировать” напротив IPv4;
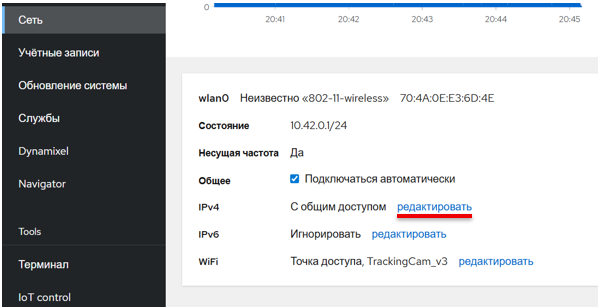
Рисунок 1.52. Редактировать IPv4
- В строке «Адреса» выберите «Вручную»
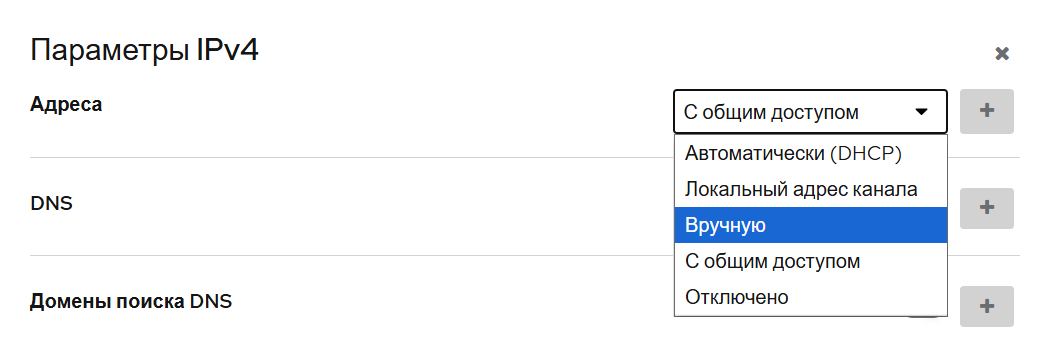
Рисунок 1.53. Настройка изменения адреса вручную
- Базово прописываем 192.168.42.<ваше число>. В примере ниже «ваше число» берется 10, но вы можете выбрать его от 0 до 255. 24 – это маска сети.

Рисунок 1.54. Редактирование IPv4
Перезагрузите камеру. Отключите и снова подключите провод.
Далее необходимо выставить такую же подсеть на Вашем персональном компьютере. Перейдите в «Настройки» Wi-Fi, который раздает камера.
Для Windows:
Нажмите “Редактировать” назначение IP.
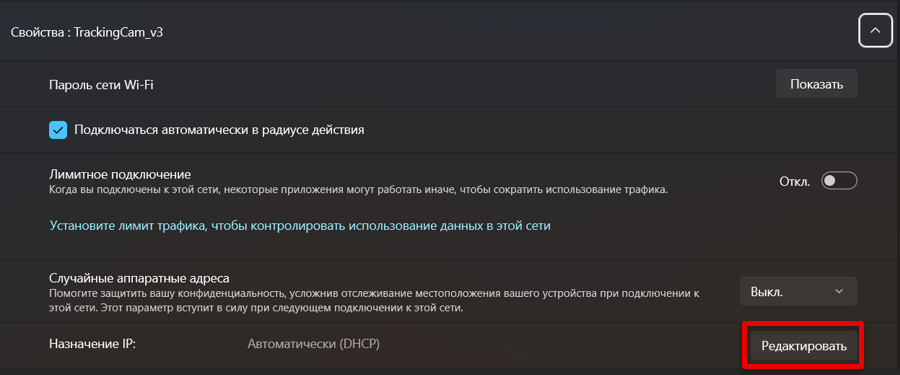
Рисунок 1.55. Редактировать назначение IP
- Ручная настройка IP-адреса.
Для Windows:
В открывшемся окне в выпадающем списке выберите «Вручную» и переведите ползунок IPv4 в активное положение. Введите IP-адрес для компьютера. Он должен отличаться от IP камеры. В маске подсети пропишите 255.255.255.0. Нажмите «Сохранить».

Рисунок 1.56. Изменение параметров IPv4 в настройках компьютера на Windows
Для Linux:
Перейдите в настройку IPv4, выберите “Manual”. Введите IP-адрес для компьютера. Он должен отличаться от IP камеры. В маске подсети пропишите 255.255.255.0. Нажмите «Apply».

Рисунок 1.57. Изменение параметров IPv4 в настройках компьютера на Linux
- Для подключения к камере перейдите в командную строку (терминал) компьютера.
Для Windows:
Win+R, введите команду cmd.
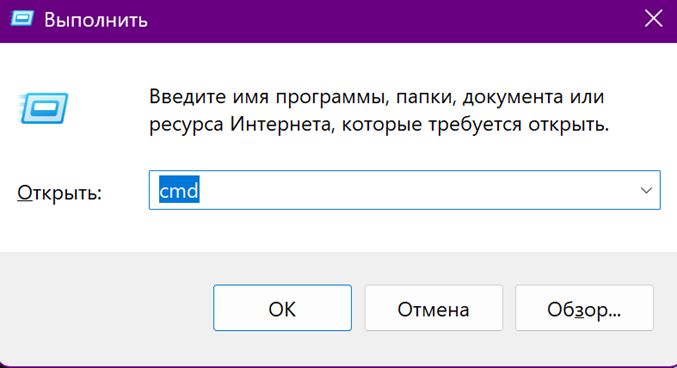
Рисунок 1.58. Командная строка компьютера на Windows
Для Linux:
Перейдите в терминал

Рисунок 1.59. Терминал
- Подключитесь к Wi-Fi камеры и посмотрите, чтобы IP-адрес беспроводной сети был таким, какой вы задали.
Для Windows:
В командной строке введите команду
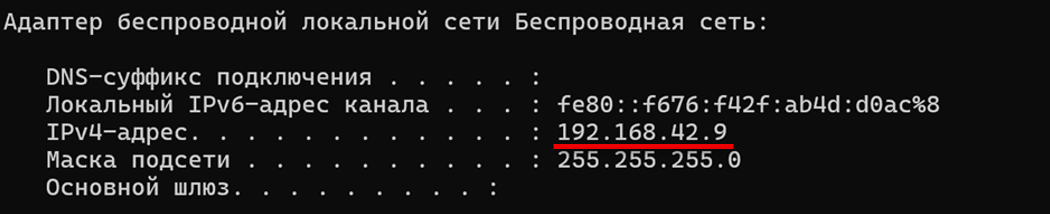
Рисунок 1.60. Вывод в командной строке Windows после ввода команды
Для Linux:
В терминале ведите команду
ip a show wlp0s20f3
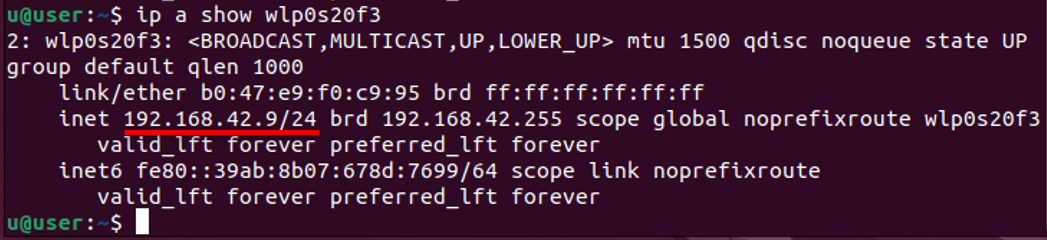
Рисунок 1.61. Вывод в терминале Linux после ввода команды
- Далее напишите команду
ping<IP камеры>. Убедитесь, что происходит обмен данными с камерой.
ping<IP камеры>
Для Windows:
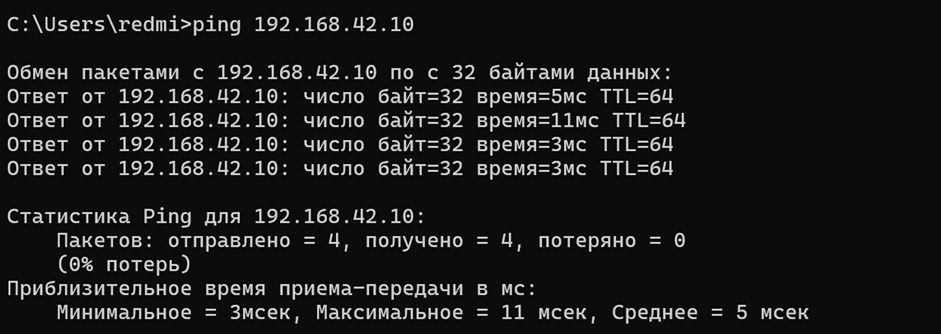
Рисунок 1.62. Вывод в командной строке Windows после ввода команды
Для Linux:
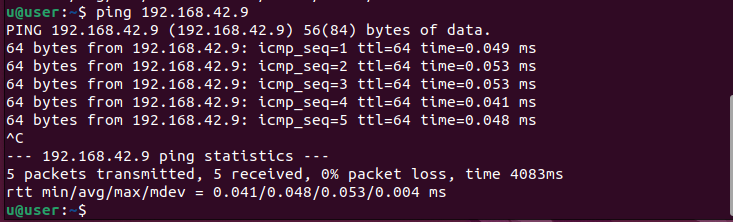
Рисунок 1.63. Вывод в терминале Linux после ввода команды
- Теперь, помимо перехода по ссылке http://trackingcam3.local:9999 , вы можете подключиться к графическому интерфейсу камеры через новый IP-адрес. Для этого в браузерной строке введите
192.168.42.<ваше число>:9999

- Если вам необходимо вернуть базовый IP камеры и подключение по нему, выполните шаги 1-4 данной инструкции. В параметрах IPv4 верните «С общим доступом»:
Рисунок 1.64. Возврат настроек Wi-Fi в управляющем интерфейсе камеры
Также верните настройки Wi-Fi сети камеры на компьютере:
Для Windows:
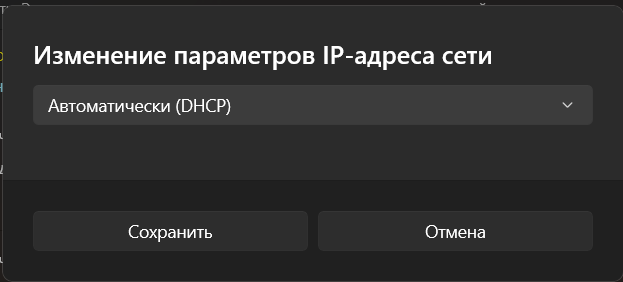
Рисунок 1.65. Возврат настроек Wi-Fi сети камеры на компьютере Windows
Для Linux:
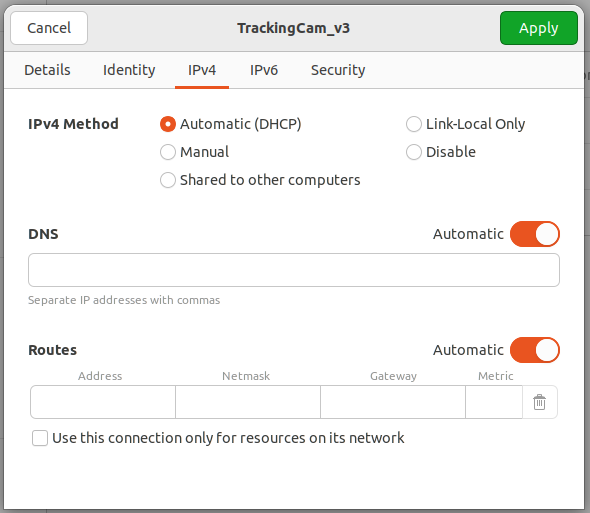
Рисунок 1.66. Возврат настроек Wi-Fi сети камеры на компьютере Linux
1.4 Настройка DXL устройств(модулей)
При программировании ARA EDU доступно использование дополнительных DXL-модулей:
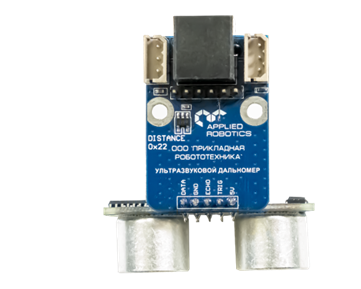
- Модуль “Ультразвуковой дальномер”
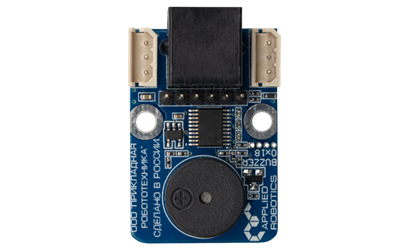
- Модуль “Звуковой пьезоизлучатель”
- Модуль “Трехцветный светодиод”
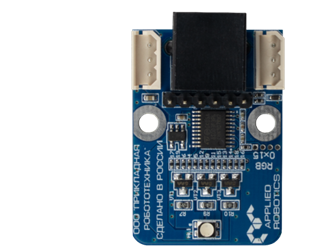
- Модуль “Датчик освещенности”
Все эти устройства можно использовать при автономном полете дрона, например, сигнализировать о чем-либо или обходить препятствия.
Перед использованием DXL устройства необходимо прошить:
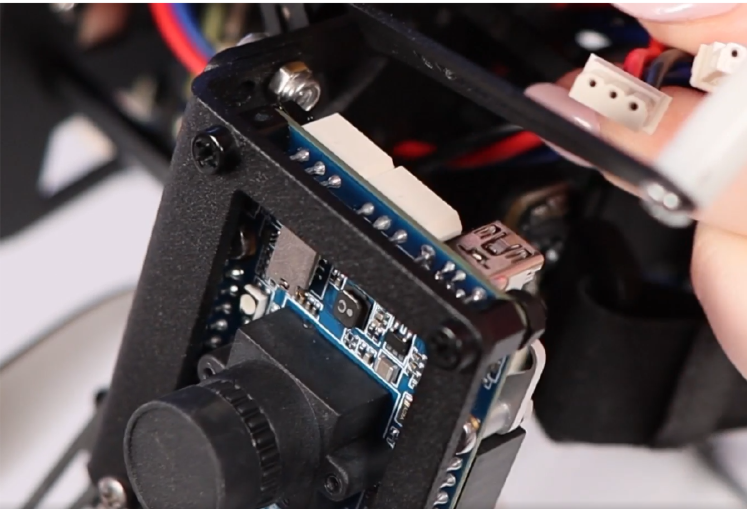
Отключите Универсальный вычислительный модуль FC-ESP32-HAT из электрической схемы. Подключите датчики «Ультразвуковой дальномер», «Трехцветный светодиод», «Датчик освещенности» последовательно друг к другу при помощи DXL проводов, последний в цепи подключите в полетный контроллер. Модуль «Звуковой пьезоизлучатель» подключите к TC3 с помощью провода DXL. Проверьте, что TC3 подключена в полетный контроллер с помощью провода DXL;
Подключите аккумулятор;
Подключитесь к TrackingCam3 через провод miniUSB и зайдите в управляющий интерфейс;
Перейдите в раздел “Терминал”;
Введите команду:
systemctl stop eagle-eye.service
- Дождитесь выполнения команды

- Введите:
source /etc/profile.d/ros/setup.bash
- Дождитесь инициализации программного окружения

- Введите
ros2 run eagle_eye_drivers dxl_setup

- После выполнения команды введите цифру 1 и нажмите ENTER
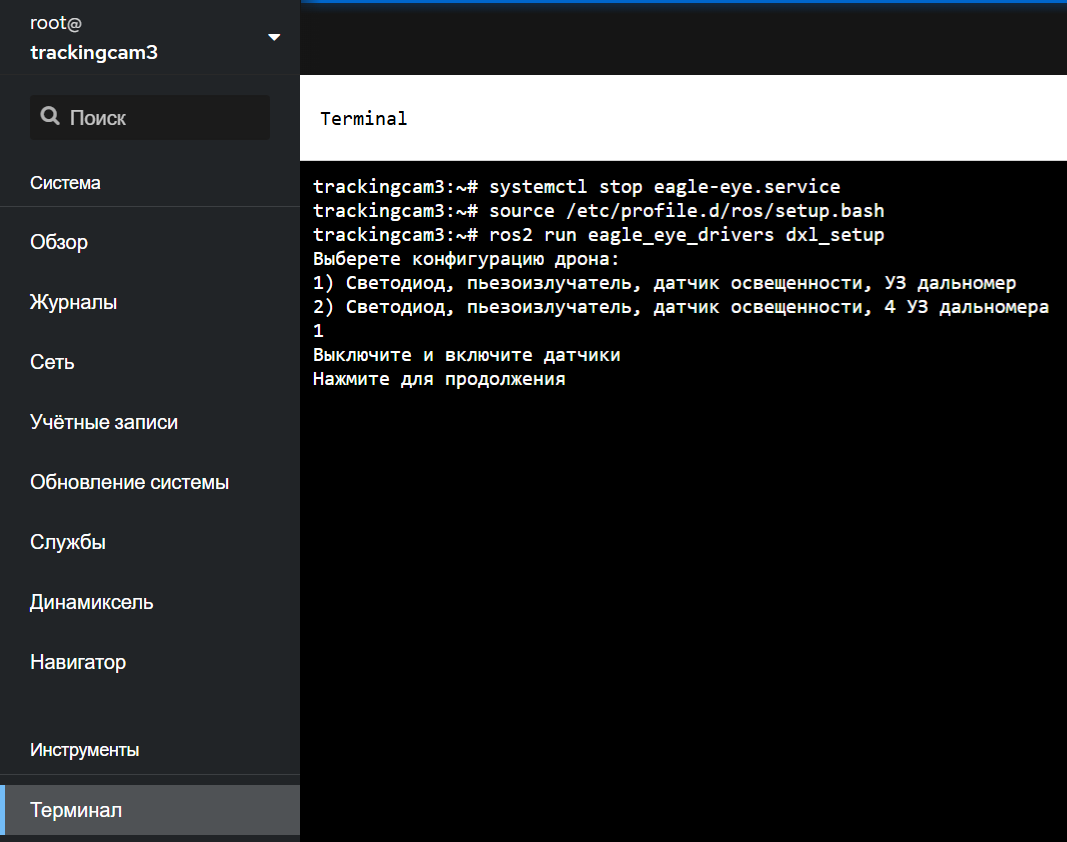
- Отключите датчики (отключите dxl провода) и полетный контроллер от TrackingCam3 и снова подключите, после чего нажмите ENTER
Начнется проверка подключения датчиков

- Если все этапы были выполнены корректно, то появится следующее сообщение:

Если же в выводе будет ошибка, проверьте, что все датчики подключены корректно.
