В данном разделе будут разобраны методы и подходы по непосредственной работе с периферийными функциональными модулями. Поскольку многие модули по принципам работы являются идентичными, то для таких модулей будут показаны обобщенные примеры. Для лучшего понимания процесса работы с модулями рекомендуется самостоятельно ознакомиться с принципами функционирования широко используемых простейших сенсоров, таких как: датчики расстояния, датчики освещения и т.п.
Рассматриваемые модули обладают двумя глобальными подходами к их применению. Первый подход они могут выступать как классические Arduino-датчики, подключение к которым выполняется с помощью стандартных проводов типа «мама-мама» или «папа-мама». Для такого способа подключения все модули имеют в своем составе шестипиновую гребенку с контактными линиями и на оборотной стороне каждого модуля есть расшифровка каждого пина. Для облегчения подключения модулей к Arduino может быть использована плата расширения для подключения сенсорных модулей AR-SENS-RJ14. Подключение модулей выполняется через встроенные разъемы RJ14 платы расширения.
Другим глобальным подходом к работе с модулями является использование их в качестве Dynamixel-совместимых устройств. На каждом из модулей находится микроконтроллер, который реализует Dynamixel-интерфейс, тем самым, позволяя подключать различные модули последовательно друг за другом в цепь. Такой способ подключения имеет преимущество, если необходимо подключить одновременно много модулей к контроллеру и максимально снизить количество используемых в коде библиотек. Для работы с несколькими разнотипными модулями одновременно достаточно только одной библиотеки.
Модули как Arduino-датчики
Для работы с периферийными модулями, как с Arduino-устройствами, можно использовать любую Arduino-подобную плату с выведенными необходимыми интерфейсами на ней и классическую среду разработки Arduino IDE. В качестве вычислительной платформы подойдет любая платформа, которую можно запрограммировать с помощью Arduino IDE. В данном случае рассмотрим способы работы с датчиками на примере Arduino подобной плате «Программируемому контроллеру моделей инженерных систем» («Контроллер КПМИС») в таблице 2.1 показаны базовые интерфейсы модулей и направление обмена данными с ними.
| Наименование модуля | Направление данных | Тип интерфейса | |
|---|---|---|---|
| 1 | Модуль «Аудиоусилитель» | Передача на модуль | прочее |
| 2 | Модуль «Датчик атмосферного давления» | Чтение с модуля | I2C |
| 3 | Модуль «Датчика линии» | Чтение с модуля | цифровой |
| 4 | Модуль «Датчик наклона» | Чтение с модуля | цифровой (2 линии) |
| 5 | Модуль «Датчик температуры и влажности» | Чтение с модуля | прочее |
| 6 | Модуль «Датчик цвета» | Чтение с модуля | I2C |
| 7 | Модуль «Датчик шума» | Чтение с модуля | аналоговый |
| 8 | Модуль «Драйвер двигателя постоянного тока» | Передача на модуль | прочее (цифровой + PWM) |
| 9 | Модуль «Драйвер двигателя постоянного тока (2 канала)» | Передача на модуль | прочее (цифровой + PWM) x2 |
| 10 | Модуль «Звуковой пьезоизлучатель» | Передача на модуль | цифровой (PWM) |
| 11 | Модуль «ИК приемник» | Чтение с модуля | цифровой |
| 12 | Модуль «Инерциальный датчик и магнетометр» | Чтение с модуля | I2C |
| 13 | Модуль «Концевой микропереключатель» | Чтение с модуля | цифровой |
| 14 | Модуль «Тактовая кнопка» | Чтение с модуля | цифровой |
| 15 | Модуль «Потенциометр» | Чтение с модуля | аналоговый |
| 16 | Модуль «Светодиод» | Передача на модуль | цифровой |
| 17 | Модуль «Силовой ключ» | Передача на модуль | цифровой |
| 18 | Модуль «Трехцветный светодиод» | Передача на модуль | цифровой |
| 19 | Модуль «Энкодер» | Чтение с модуля | цифровой |
| 20 | Модуль «Ультразвуковой дальномер» | Чтение с модуля | цифровой |
| 21 | Модуль «Джойстик» | Чтение с модуля | аналоговый |
| 22 | Модуль «Освещенности» | Чтение с модуля | аналоговый |
| 23 | Модуль «Силы» | Чтение с модуля | аналоговый |
| 24 | Модуль «Преобразователь интерфейсов» | Чтение с модуля и запись на модуль | цифровой |
Таблица 2.1. Базовые интерфейсы модулей
Цифровые и аналоговые модули
Под цифровым или аналоговым модулем в рамках данного пособия понимается модуль со способом подключения, при котором используется 3 линии: питание, земля и сигнальная линия, которая в зависимости от типа модуля подключается либо к цифровой линии (передает или получает «0» или «1») контроллера, либо к аналоговой линии (получает непрерывный сигнал и декодирует его в диапазон 0 – 1023), либо к PWM линии (способной генерировать сигнал заданного уровня). Таким образом, работа с цифровыми датчиками при получении данных с них сводится к фиксированию уровня сигнала «0» или «1» (такие модули как: датчик линии, наклона, ИК приемника, концевого выключателя, тактовой кнопки, ИК энкодера). При управлении цифровым модулем можно передавать на него «0» или «1» для включения / выключения модуля (модули силового ключа, светодиода, трехцветного светодиода). Для примера такого способа управления рассмотрим светодиоды – при их включении они будут светить в полную силу. Однако, если необходимо управлять яркостью их свечения, то требуется подключить светодиоды к цифровым линиям с поддержкой PWM, после чего задавать уровень яркости их свечения программным способом. Так же, управление с помощью PWM линии обязательно для таких устройств, как модуль «Звуковой пьезоизлучатель» – для генерирования звуков. Таким образом, способ подключения цифровых модулей к контроллеру выбирается пользователем в зависимости от требований к решению задачи. При получении данных с аналогового модуля (датчик шума и потенциометр) непрерывный выходной сигнал с модуля должен быть оцифрован с помощью встроенного в контроллер АЦП и на выходе будет получено некое значение в диапазоне от 0 до 1023, соответствующее уровню выходного сигнала в диапазоне от 0 до 5В.
Рассмотрим процесс взаимодействия, реализованный путем каждого описанного выше способа.
Опрос модуля «Тактовая кнопка»
Подключаем модуль «Тактовая кнопка» к контроллеру КПМИС в соответствии со схемой расположения контактов. Линию модуля 5В подключаем к линии 5В контроллера, линию GND – к GND контроллера, а SIG – к цифровой линии. В результате, подключённый к модуль будет выглядеть следующим образом (см. Рис. 2.1 и Рис. 2.2).
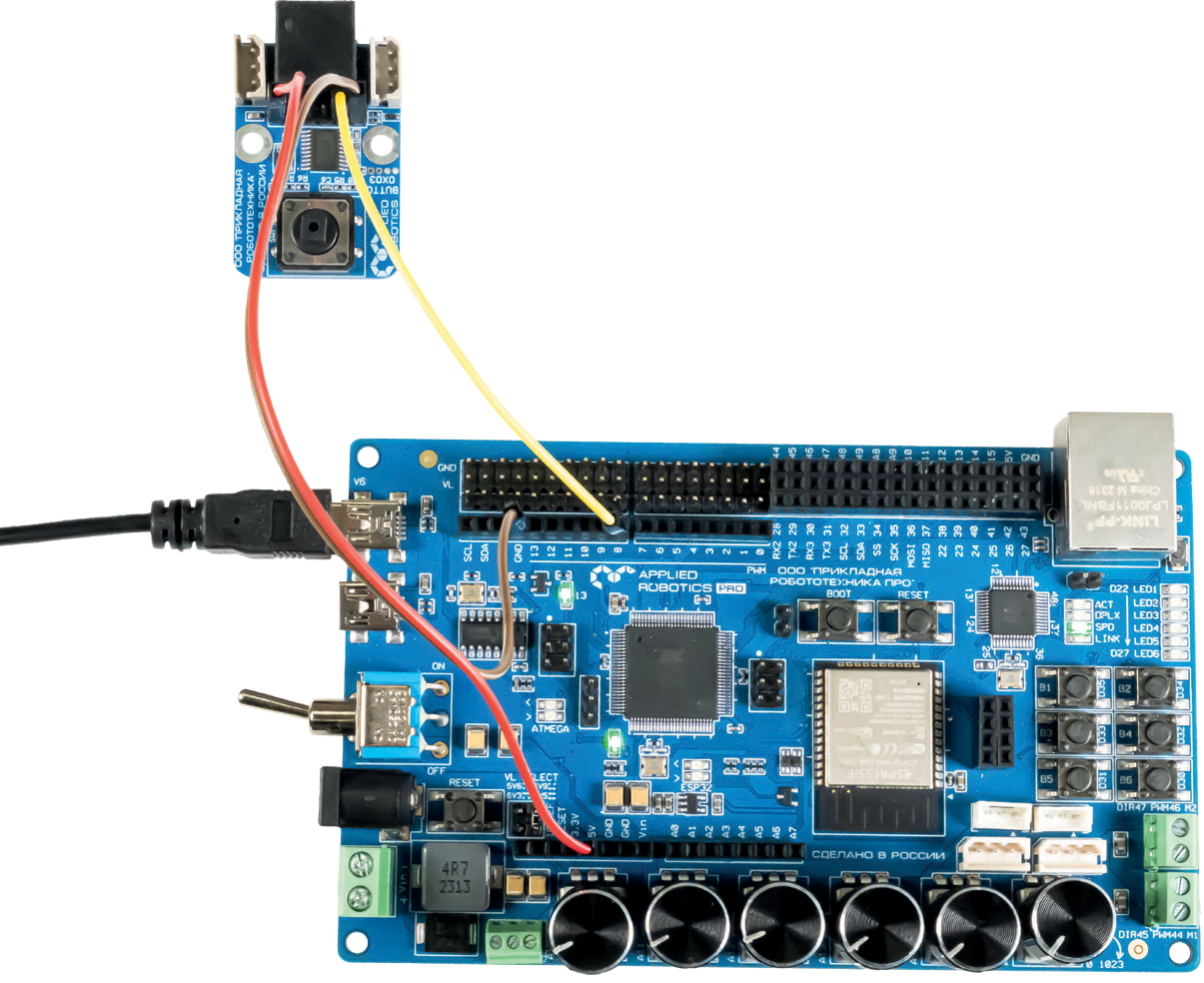 Рис. 2.1. Подключение модуля «Тактовая кнопка» к контроллеру КПМИС
Рис. 2.1. Подключение модуля «Тактовая кнопка» к контроллеру КПМИС
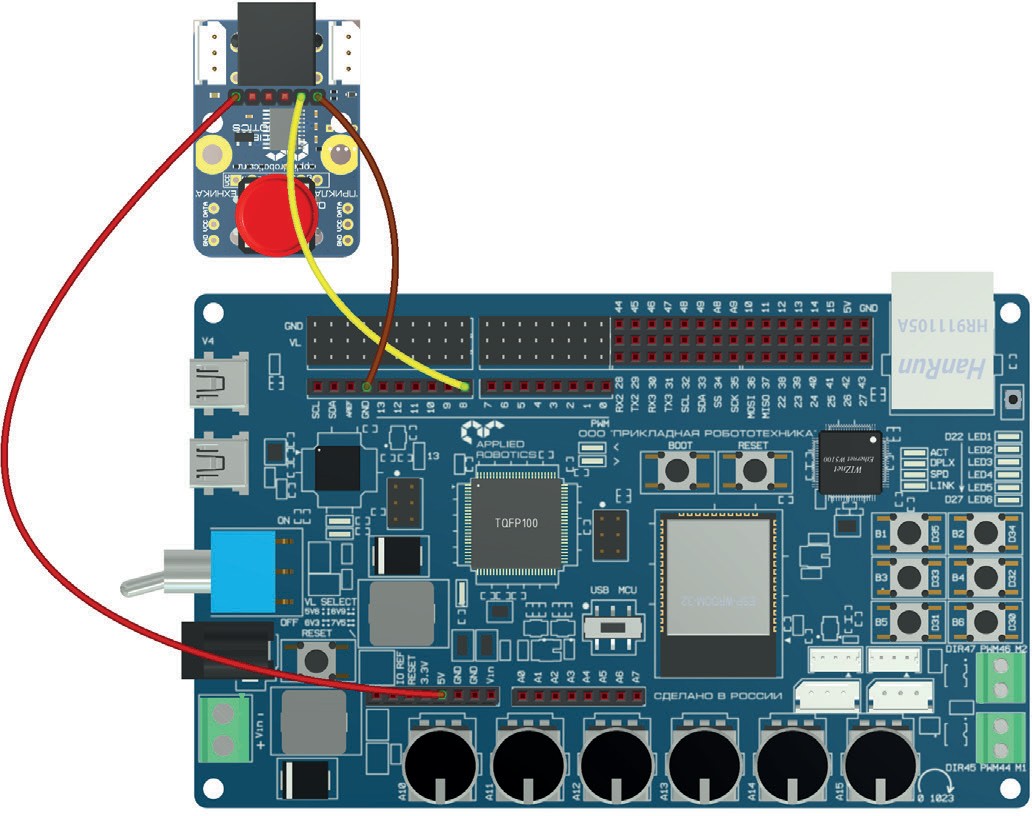 Рис. 2.2. Схема подключения модуля «Тактовая кнопка» к контроллеру КПМИС
Рис. 2.2. Схема подключения модуля «Тактовая кнопка» к контроллеру КПМИС
Для работы с модулем «Тактовая кнопка» напишем в среде Arduino IDE следующий код:
// номер цифровой линии, к которой подключен SIG const
int buttonPin = 8;
// переменная для хранения состояния кнопки
uint8_t buttonState = 0;
//инициализируем соединение по последовательному порту
Serial.begin(115200);
// инициализируем цифровую линию SIG, как вход
pinMode(buttonPin, INPUT);
}
void loop(){
//считываем значения с цифровой линии
buttonState = digitalRead(buttonPin);
// проверяем, нажата ли кнопка
// если нажата, то buttonState будет иметь значение «HIGH»:
if (buttonState == LOW) {
// сообщаем, что кнопка нажата
Serial.println(“Button pressed”);
}
else {
// сообщаем, что кнопка не нажата
Serial.println(“Button not pressed”);
}
// пауза в полсекунды при опросе кнопки
delay(500);
}
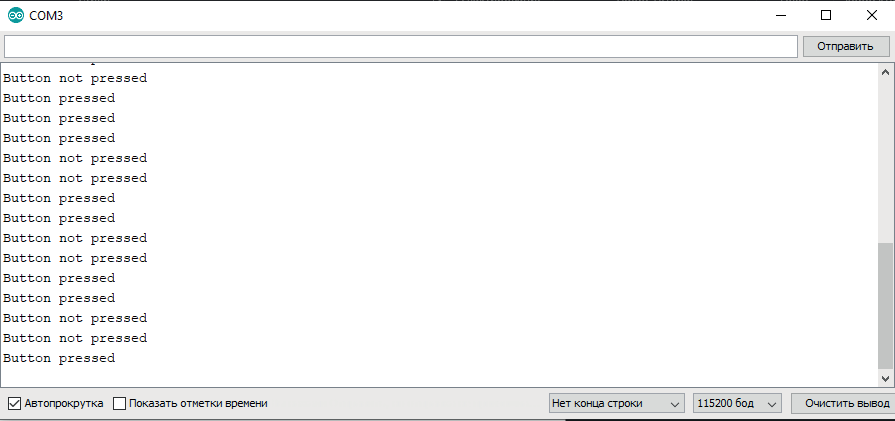 Рис. 2.3. Вывод в монитор порта информации о нажатии кнопки
Рис. 2.3. Вывод в монитор порта информации о нажатии кнопки
Аналогичным образом можно получать данные со всех цифровых модулей и использовать эти данные в своих системах управления.
Управление модулем «Трехцветный светодиод»
Подключаем модуль «Трехцветный светодиод» к контроллеру КПМИС, в соответствии со схемой расположения контактов. Линию модуля 5В подключаем к линии 5В контроллера, линию GND – к GND контроллера, а линии управления цветовыми составляющими R, G и B – соответственно, к цифровым линиям. В результате, подключённый к контроллеру КПМИС модуль будет выглядеть следующим образом (Рис. 2.4 и Рис. 2.5):
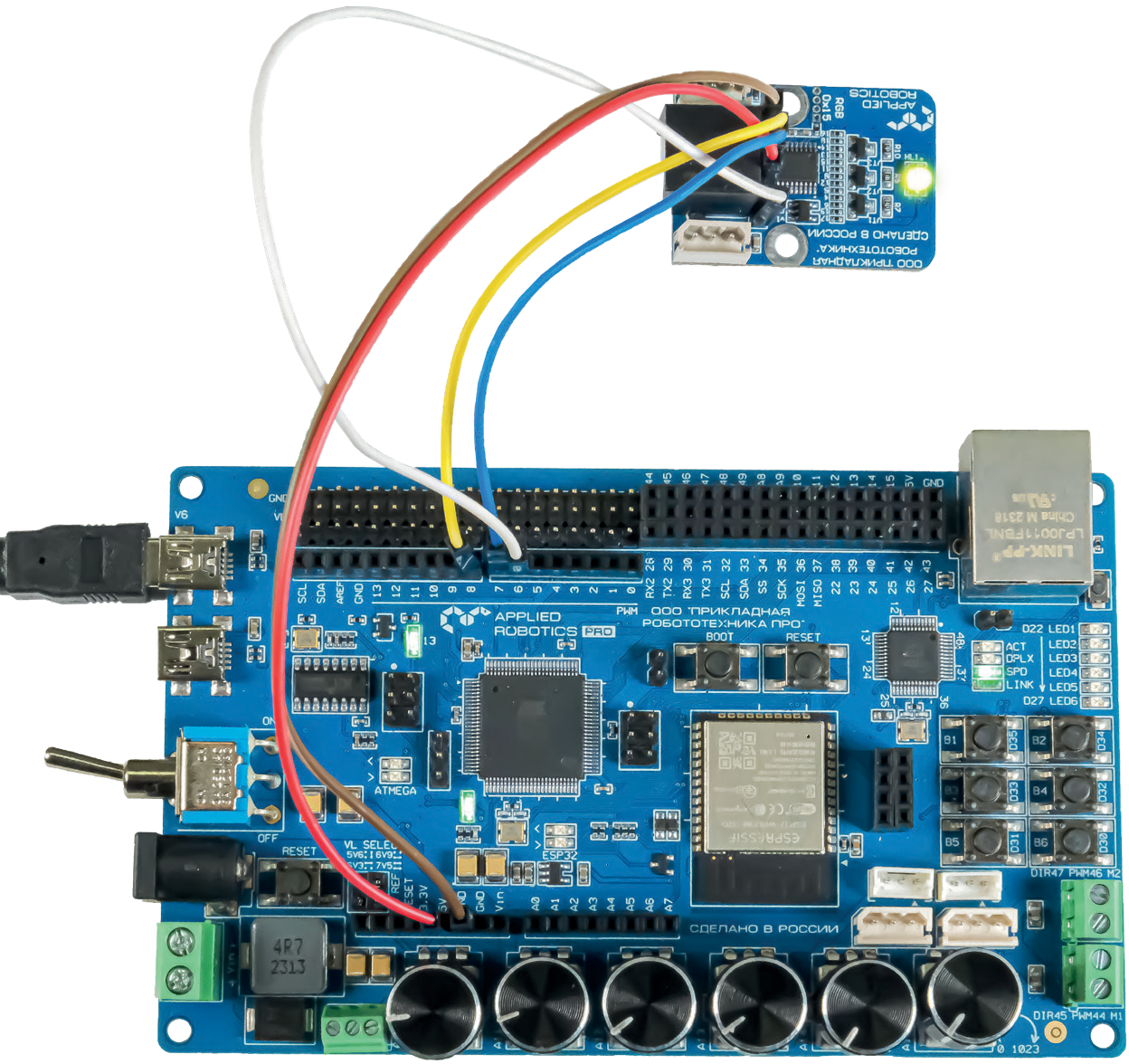 Рис. 2.4. Подключение модуля «Трехцветный светодиод» к контроллеру КПМИС
Рис. 2.4. Подключение модуля «Трехцветный светодиод» к контроллеру КПМИС
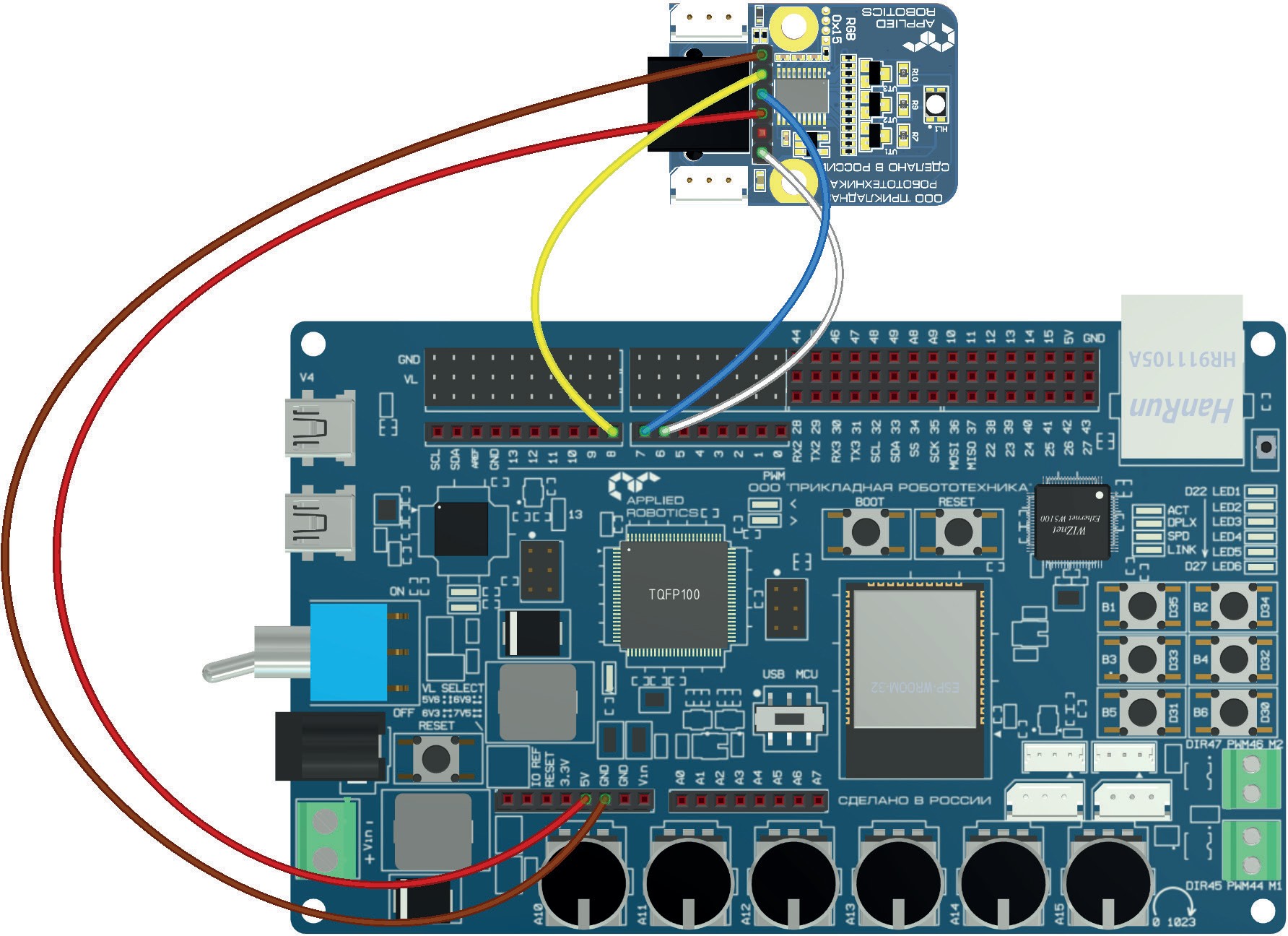 Рис. 2.5. Схема подключения модуля «Трехцветный светодиод» к контроллеру КПМИС
Рис. 2.5. Схема подключения модуля «Трехцветный светодиод» к контроллеру КПМИС
Для управления светодиодом напишем в среде Arduino IDE следующий скетч и загрузим его в контроллер стандартным способом:
// номера цифровой линии, к которой подключены линии RGB const
int RPin = 6;
const int GPin = 7;
const int BPin = 8;
// инициализируем цифровые линии, как выход
pinMode(RPin, OUTPUT);
pinMode(GPin, OUTPUT);
pinMode(BPin, OUTPUT);
}
void loop(){
// включаем все составляющие последовательно
// через каждые 2 секунды
digitalWrite(RPin, HIGH);
delay(2000);
digitalWrite(GPin, HIGH);
delay(2000);
digitalWrite(BPin, HIGH); delay(2000);
// выключаем все составляющие
digitalWrite(RPin, LOW);
digitalWrite(GPin, LOW);
digitalWrite(BPin, LOW);
// плавное включение красного
for (int i=0; i<255; i++){
analogWrite(RPin,i);
delay(5);
}
// выключаем составляющую
digitalWrite(RPin, LOW);
// плавное включение зеленого
for (int i=0; i<255; i++){
analogWrite(GPin,i);
delay(5);
}
// выключаем составляющую
digitalWrite(GPin, LOW);
// плавное включение синего
for (int i=0; i<255; i++){
analogWrite(BPin,i);
delay(5);
}
// выключаем составляющую
digitalWrite(BPin, LOW);
}
В результате, трехцветный светодиод на модуле будет вести себя следующим образом:
Поочередно включатся все его составляющие, таким образом, что в итоге он будет светиться белым цветом. После чего, каждая из составляющих светодиода будет включаться на минимальной яркости, а затем увеличивать ее.
Аналогичным образом, но используя другие функции, происходит управление модулем «Звуковой пьезоизлучатель» (см. Рис. 2.6 и Рис. 2.7):
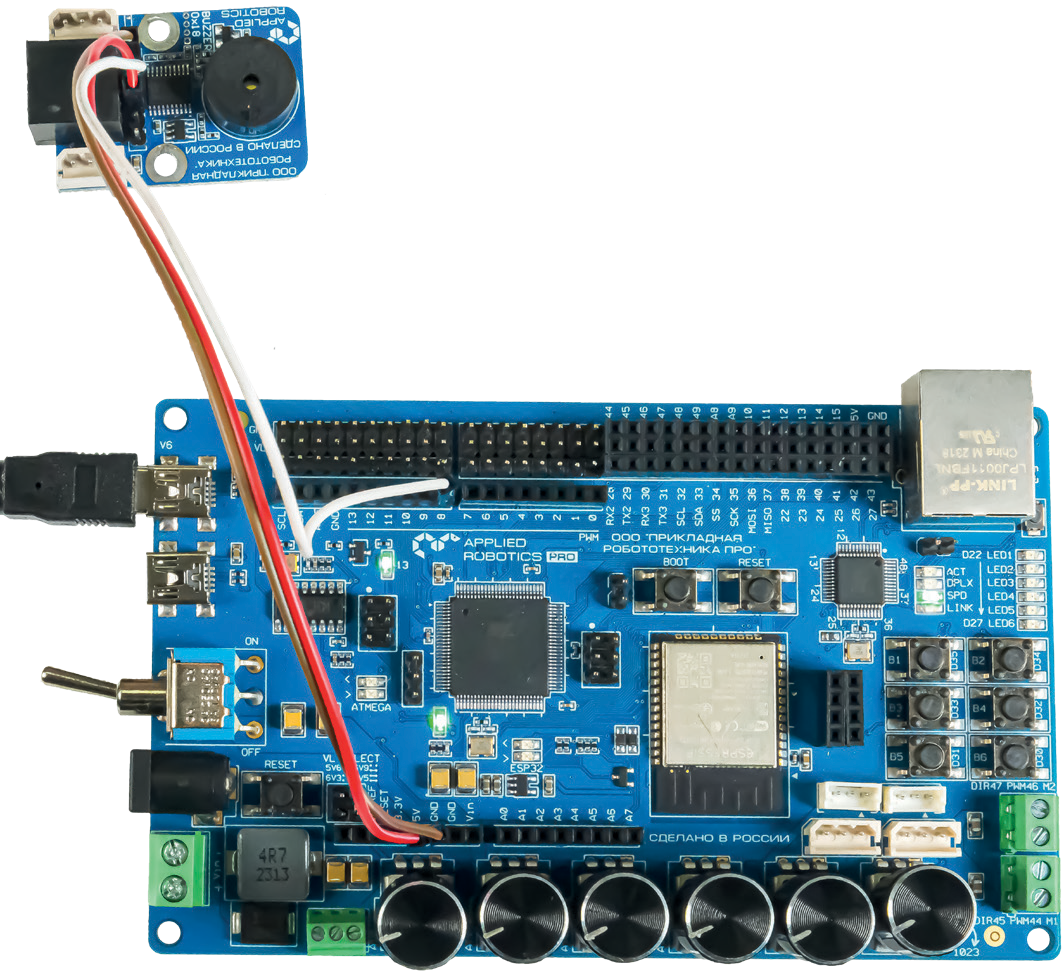 Рис. 2.6. Подключение модуля «Звуковой пьезоизлучатель» к контроллеру КПМИС
Рис. 2.6. Подключение модуля «Звуковой пьезоизлучатель» к контроллеру КПМИС
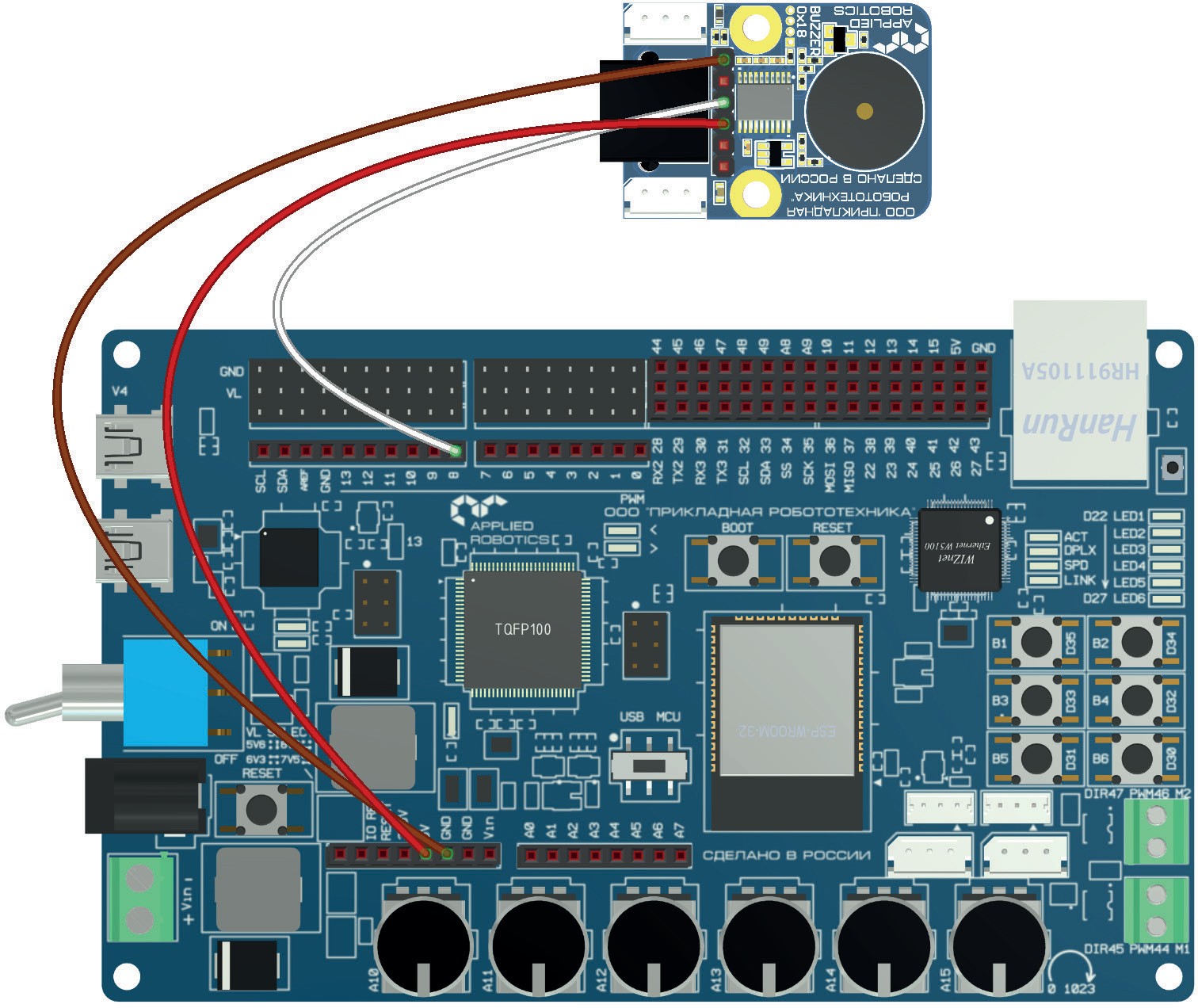 Рис. 2.7. Схема подключения модуля «Звуковой пьезоизлучатель» к контроллеру КПМИС
Рис. 2.7. Схема подключения модуля «Звуковой пьезоизлучатель» к контроллеру КПМИС
Код в среде Arduino IDE, в этом случае, будет выглядеть следующим образом:
// номер цифровой линии, к которой подключен звуковой пьезоизлучатель
const uint8_t BuzzPin = 8;
void setup(){
// Выводим звуковой сигнал с частотой 2048 Гц и длительностью 0,1 сек
tone(BuzzPin, 2048, 100);
delay(200);
// повторяем вывод звука
tone(BuzzPin, 2048, 100);
}
void loop(){
}
Таким образом, можно управлять цифровыми модулями, используя как управление низким и высоким уровнем, так и управление путем плавного изменения уровня управляющего сигнала.
Получение данных с модуля «Потенциометр»
Подключаем модуль «Потенциометр» к контроллеру КПМИС, в соответствии со схемой расположения контактов. Линию модуля 5В подключим к линии 5В контроллера, линию GND – к GND контроллера, а линию SIG подключим к аналоговой линии. В результате, подключённый к контроллеру КПМИС модуль будет выглядеть следующим образом (см. Рис. 2.8 и Рис 2.9):
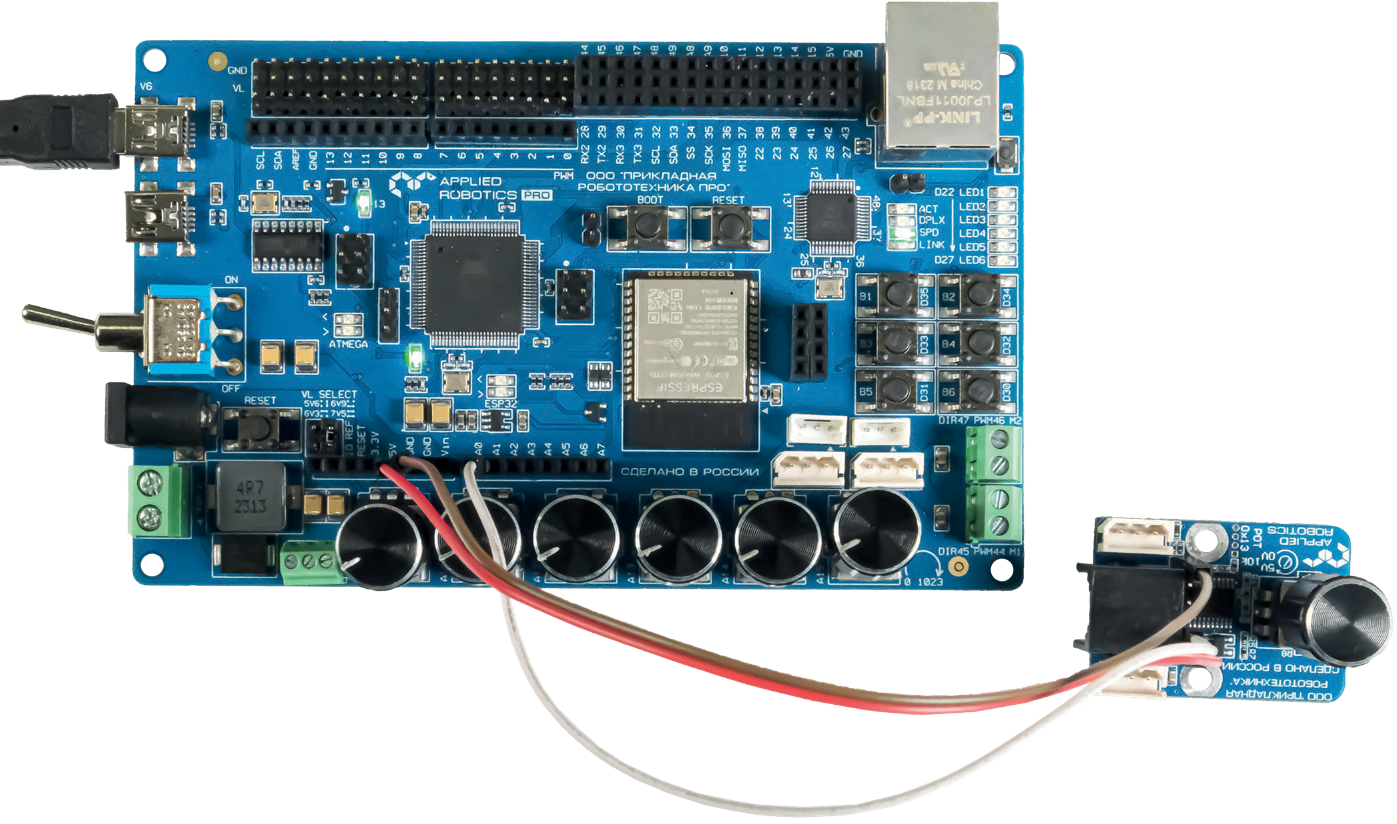 Рис. 2.8. Подключение модуля «Потенциометр» к контроллеру КПМИС
Рис. 2.8. Подключение модуля «Потенциометр» к контроллеру КПМИС
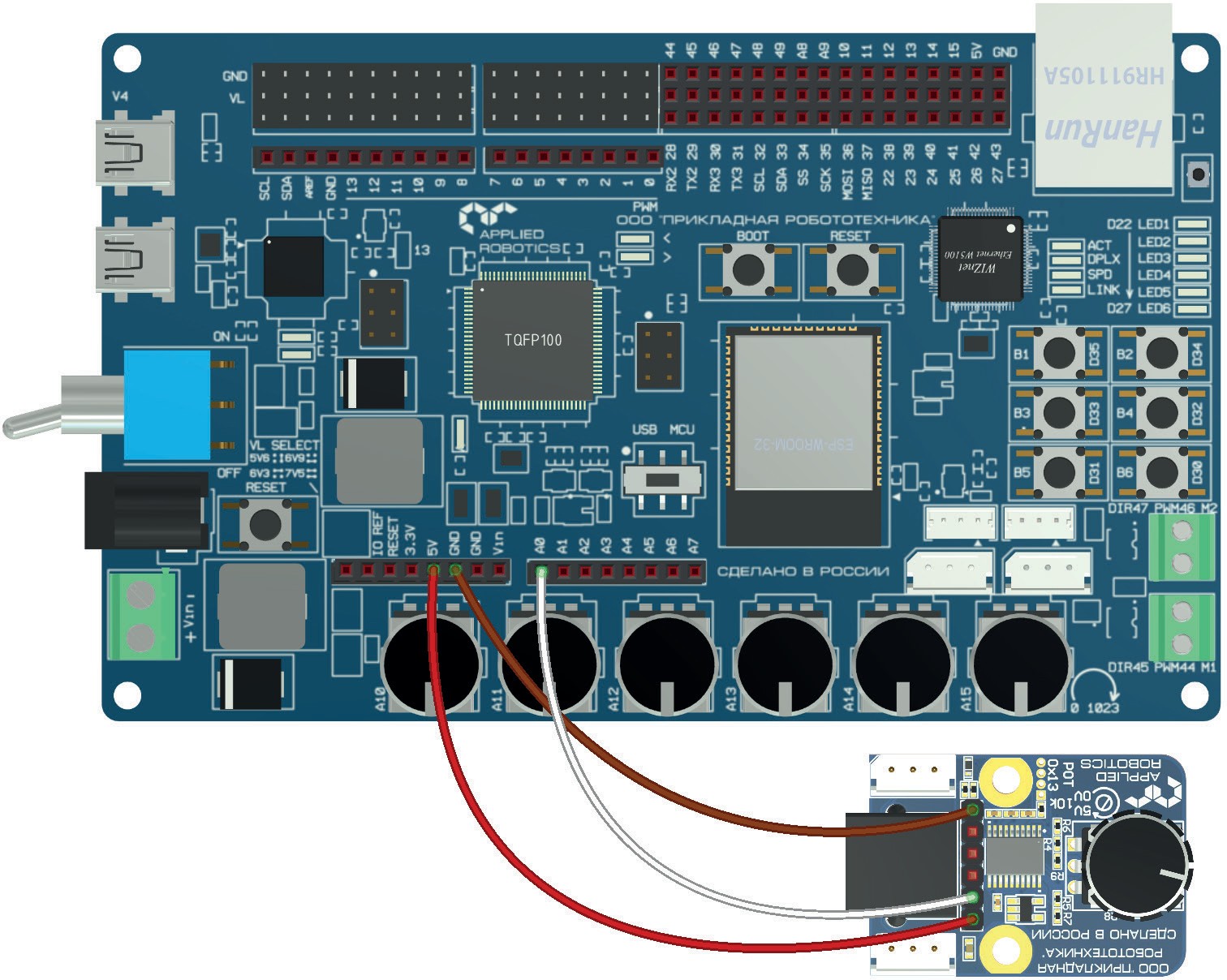 Рис. 2.9. Схема подключения модуля «Потенциометр» к контроллеру КПМИС
Рис. 2.9. Схема подключения модуля «Потенциометр» к контроллеру КПМИС
void setup() {
// инициализируем соединение по последовательному порту
Serial.begin(115200);
}
void loop(){
// читаем данные на аналоговом порту в переменную
int PotValue = analogRead(A0);
// выводим данные в монитор порта
Serial.println(PotValue);
// пауза
delay(100);
}
В результате работы загруженного кода, в монитор порта будут выводиться оцифрованные показания с потенциометра (см. Рис. 2.10).
Таким образом, возможны обмен и получение данных с простейших цифровых и аналоговых модулей, подключенных к Arduino-подобным контроллерам. Оставшиеся нерассмотренные цифровые и аналоговые модули обладают теми же подходами к работе, что и те модули, которые были рассмотрены ранее.
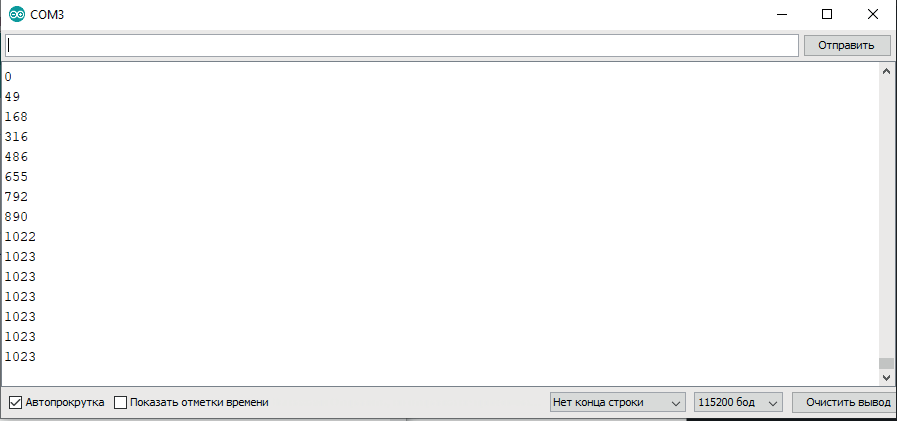 Рис. 2.10. Окно монитора порта с показаниями модуля «Потенциометр»
Рис. 2.10. Окно монитора порта с показаниями модуля «Потенциометр»
I2C модули
I2C интерфейс широко распространен в современной электронике. Данный интерфейс представляет собой две двунаправленные линии связи, называемые линией последовательных данных (SDA) и линией тактирования (SCL), которые реализуют последовательный протокол обмена данными. В дополнение к двум сигнальным линиям требуются линия питания и земля. Данный интерфейс позволяет последовательно подключать несколько модулей к одному контроллеру. Это происходит благодаря тому, что каждый I2C модуль является ведомым устройством (Slave) и имеет уникальный адрес, за счет которого ведущее устройство (Master) способно находить конкретное устройство в цепи и обмениваться данными именно с ним. Таким образом, устройства, поддерживающие I2C интерфейс, могут быть очень разнообразными по своей сути. И для работы с ними, как правило, применяются соответствующие библиотеки, существенно облегчающие процесс написания кода и обработки данных.
В качестве примера рассмотрим процесс работы с модулем «Датчика атмосферного давления» на чипе BMP280. Подключаем данный модуль к контроллеру КПМИС, в соответствии со схемой расположения контактов. Линию модуля 5В подключим к линии 5В контроллера, линию GND – к GND контроллера, а линии интерфейса SCL и SDA, соответственно к SCL и SDA на плате. В результате, подключённый к контроллеру КПМИС модуль будет выглядеть следующим образом (см. Рис. 2.11 и Рис 2.12):
Прежде чем приступить к написанию кода программы, для упрощения этого процесса требуется скачать библиотеку для работы с датчиком атмосферного давления (барометром) на чипе BMP280. Таких библиотек существует много, в данном примере воспользуемся библиотекой iarduino_Pressure_BMP, скачиваемой с сайта https://iarduino.ru/file/227. html.
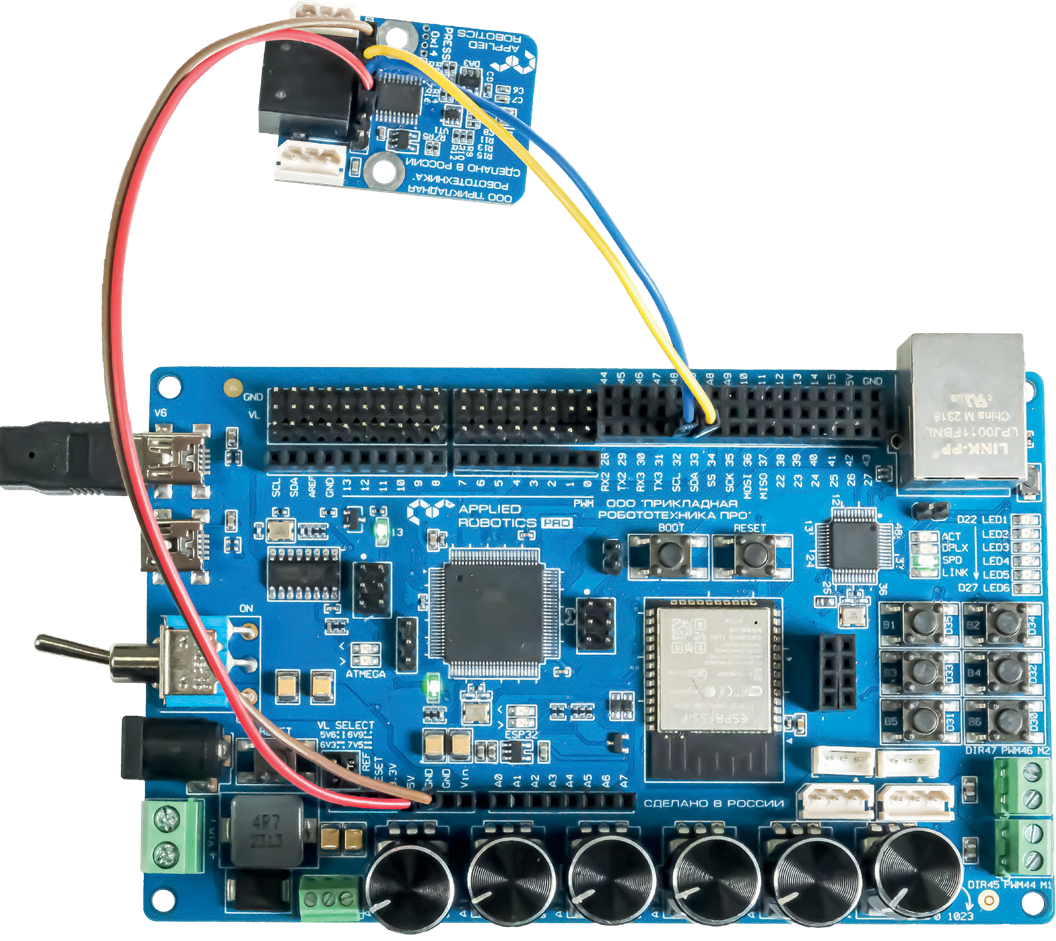 Рис. 2.11. Подключение модуля «Датчик атмосферного давления» к контроллеру КПМИС
Рис. 2.11. Подключение модуля «Датчик атмосферного давления» к контроллеру КПМИС
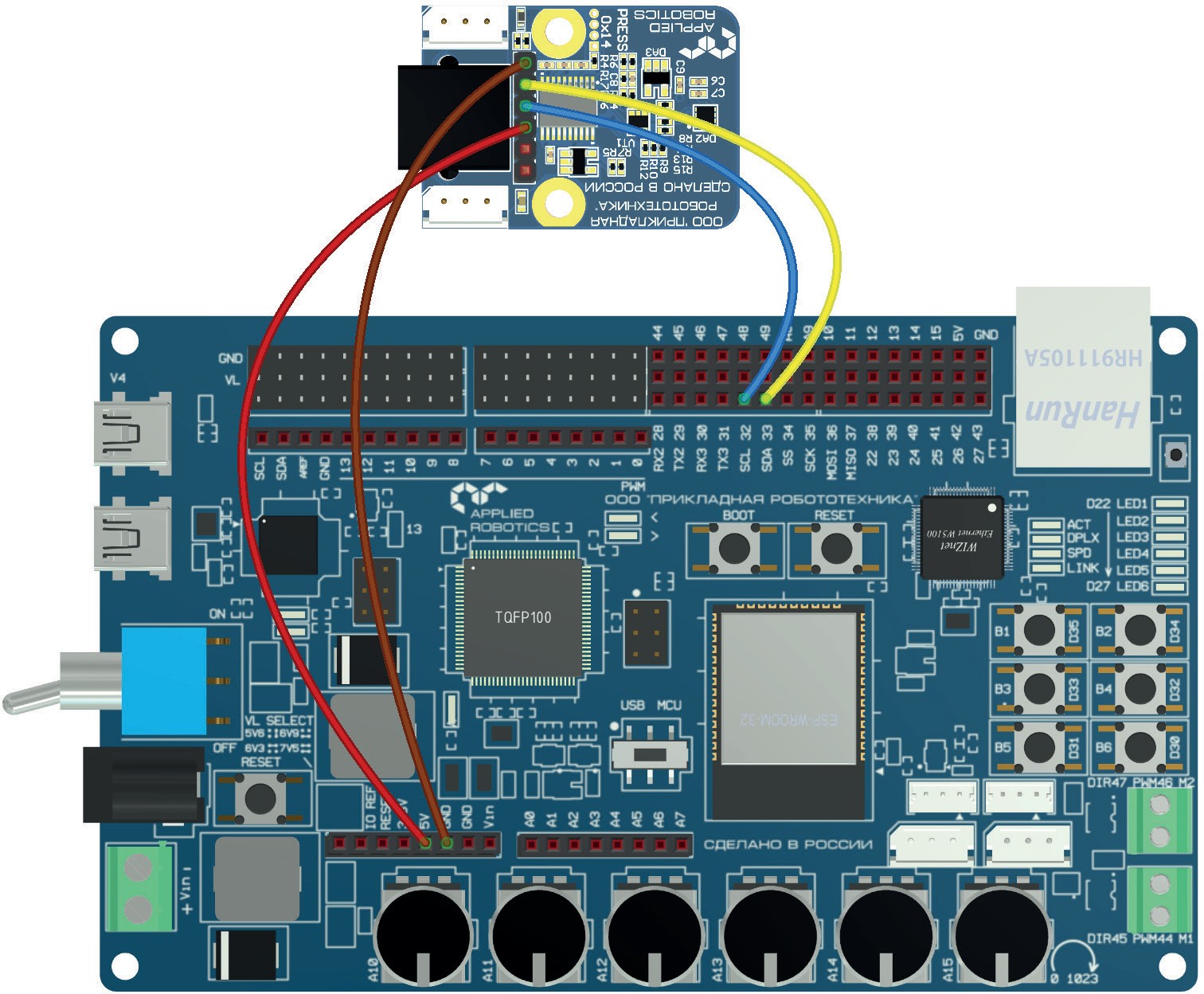 Рис. 2.12. Схема подключения модуля «Датчик атмосферного давления» к контроллеру КПМИС
Рис. 2.12. Схема подключения модуля «Датчик атмосферного давления» к контроллеру КПМИС
После загрузки, библиотеку требуется установить в среду разработки стандартными методами, после чего можно приступать к написанию кода. Код для работы с модулем «Датчик атмосферного давления» будет выглядеть следующим образом:
// подключение библиотеки для работы с I2C интерфейсом
#include <Wire.h>
// подключение библиотеки «iarduino_Pressure_BMP»
#include <iarduino_Pressure_BMP.h>
// объявление объекта sensor для работы с датчиком давления
iarduino_Pressure_BMP sensor;
void setup(){
// инициализируем соединение по последовательному порту
Serial.begin(115200);
delay(1000);
// инициируем работу с датчиком. Текущая высота будет принята за 0 м.
sensor.begin();
}
void loop (){
// Считываем данные и выводим следующие параметры: температуру в °С, давление в мм. рт. ст., изменение высоты, относительно значения, указанного в функции begin (по умолчанию 0 метров).
if(sensor.read(1))
{
Serial.println((String)”CEHCOP BMP” + sensor.type + “: \t P = “ + sensor. pressure + “\tMM.PT.CT, \t T = “ + sensor.temperature + “ *C, \t\t B = “+sensor. altitude+” M.”);
}
else
{Serial.println(“HET OTBETA OT CEHCOPA”);}
// Считываем данные и выводим следующие параметры: температуру в °С и давление в Па, давление в мм. рт. ст., изменение высоты, относительно значения, указанного в функции begin(по умолчанию 0 метров).
if(sensor.read(2))
{Serial.println((String)”CEHCOP BMP” + sensor.type + “: \t P = “ + sensor. pressure + “\tPa, \t\t T = “ + sensor.temperature + “ *C, \t\t B = “+sensor. altitude+” M.”);}
else
{Serial.println(“HET OTBETA OT CEHCOPA”);} delay(3000);
}
Рис. 2.13. Окно монитора порта с показаниями модуля «Датчик атмосферного давления»
По сути, работа с любыми I2C модулями, подключаемыми к Arduino-совместимым платам, сводится к установке соответствующей библиотеки и ее простейшего применения. Таким образом, подключив аналогично модуль «Датчика цвета» и модуль «Инерциальный датчик и магнетометр», можно организовать их опрос и использовать полученные данные в своих проектах.
Прочие модули
К прочим модулям, в данном случае, относятся те модули, которые не имеют стандартного способа взаимодействия (например, как в случае использования интерфейса I2C или при подключении стандартных цифровых или аналоговых датчиков). В связи с чем, при работе с каждым из них необходимо в каждом конкретном случае использовать уникальный подход – используя, например, готовую библиотеку или комбинацию способов управления. Рассмотрим процессы работы с модулями производства ООО «Прикладная робототехника», требующими нестандартные подходы к управлению.
Модуль «Датчик температуры и влажности воздуха»
Модуль «Датчик температуры и влажности воздуха» построен на базе сенсора DHT11, способного определять температуру и влажность окружающей среды в области около нормальных климатических условий (при температуре от 0 до 50 градусов и влажности от 20 до 90%). Подключение модуля к контроллеру КПМИС выполняется в соответствии с распиновкой разъема. Таким образом, линию модуля 5В подключим к линии 5В контроллера, линию GND – к GND контроллера, а линию управления SIG – к цифровой линии. В результате, внешний вид подключенного модуля будет выглядеть, как на Рис. 2.14 и Рис. 2.15.
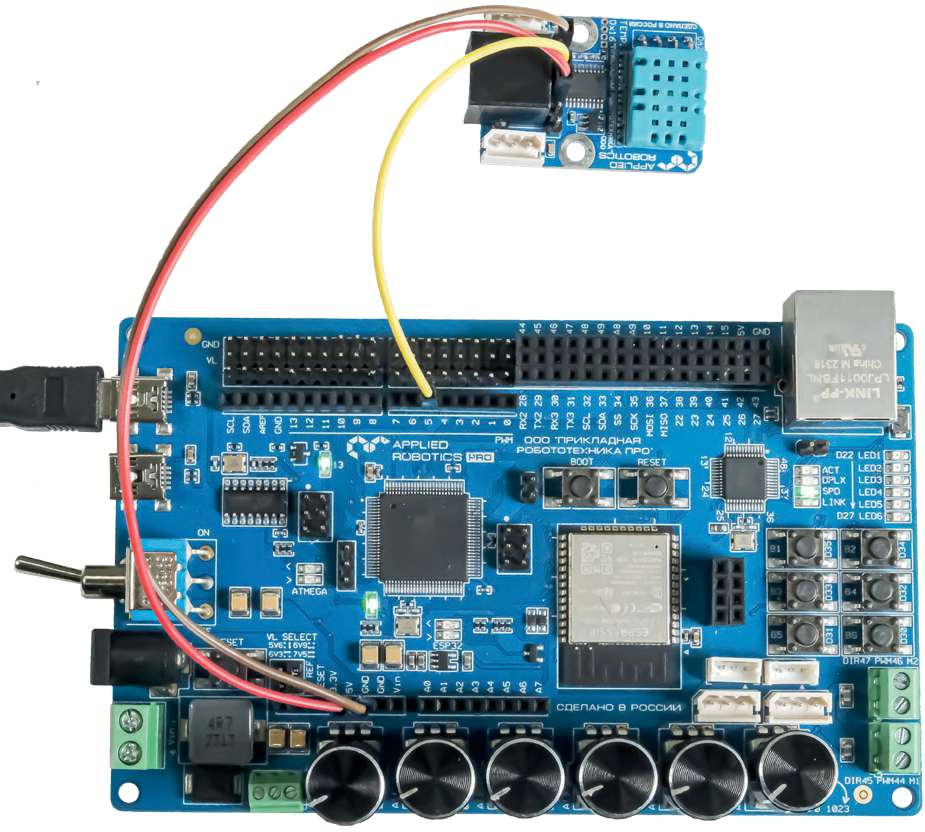 Рис. 2.14. Подключение модуля «Датчик температуры и влажности воздуха» к контроллеру КПМИС
Рис. 2.14. Подключение модуля «Датчик температуры и влажности воздуха» к контроллеру КПМИС
Поскольку данный модуль имеет уникальный протокол обмена данными, подобный 1-Wire, для работы с ним рекомендуется использовать подходящую библиотеку. Таких библиотек существует достаточно много, но в данном примере воспользуемся библиотекой «iarduino_DHT», скачать которую можно по следующей ссылке: https://iarduino.ru/file/225. html. После установки библиотеки стандартными способами можно открыть базовый пример и модифицировать его под актуальные требования. В результате, получится следующий код:
// подключаем библиотеку для работы с датчиком DHT
#include <iarduino_DHT.h>
// объявляем переменную для работы с датчиком DHT, указывая номер цифрового вывода, к которому подключён модуль
iarduino_DHT sensor(5);
void setup(){
// открываем последовательный порт на скорости 9600 бод
Serial.begin(115000);
// выполняем задержку для перехода датчика в активное состояние
delay(1000);
}
void loop(){
// читаем показания датчика
switch(sensor.read()){
case DHT_OK:
Serial.println((String) “CEHCOP B KOMHATE: “ + sensor.hum + “% “ + sensor.tem + “*C”);
break;
case DHT_ERROR_CHECKSUM:
Serial.println( “CEHCOP B KOMHATE: HE PABEHCTBO KC”);
break;
case DHT_ERROR_DATA:
Serial.println( “CEHCOP B KOMHATE: OTBET HE COOTBETCTB. CEHCOPAM ‘DHT’”);
break;
case DHT_ERROR_NO_REPLY:
Serial.println( “CEHCOP B KOMHATE: HET OTBETA”);
break;
default:
Serial.println( “CEHCOP B KOMHATE: ERROR”); break;
}
delay(2000);
}
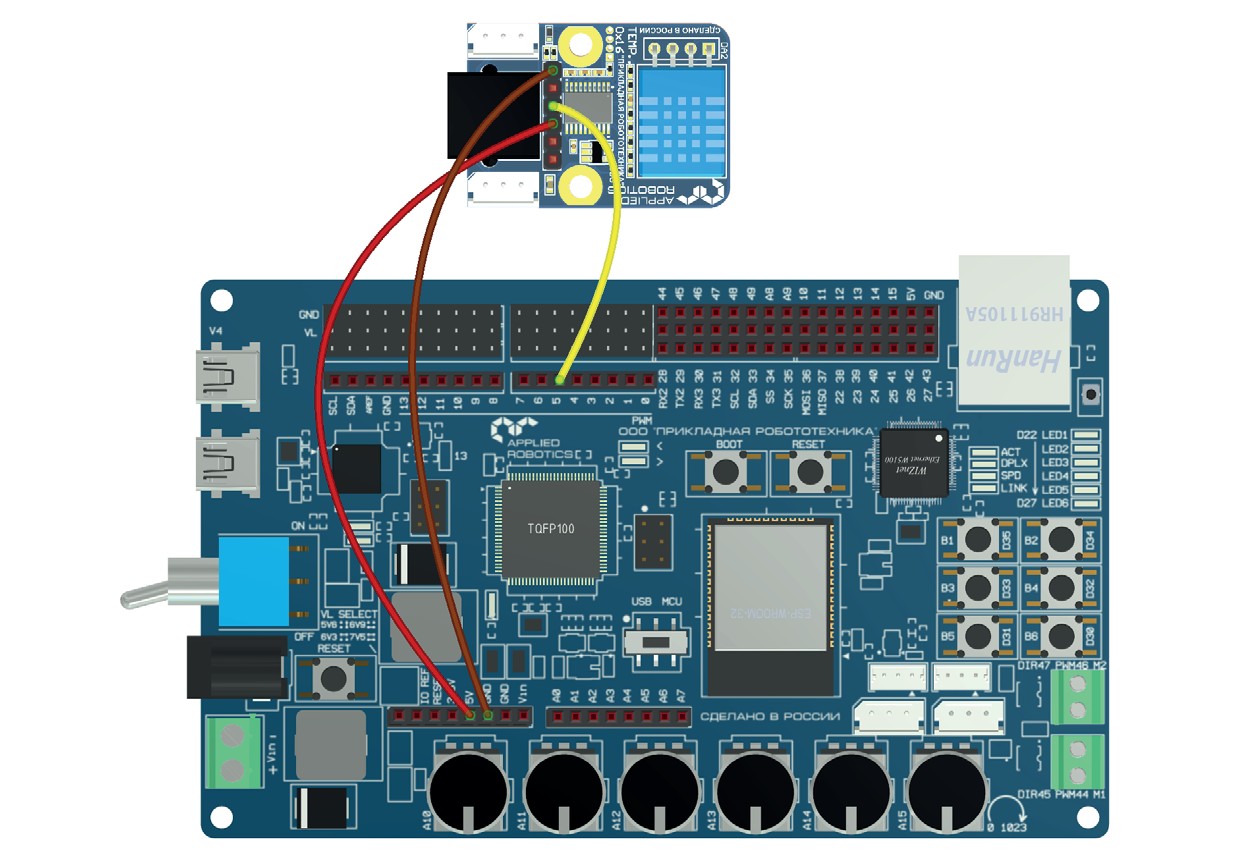 Рис. 2.15. Подключение модуля «Датчик температуры и влажности воздуха» к контроллеру КПМИС
Рис. 2.15. Подключение модуля «Датчик температуры и влажности воздуха» к контроллеру КПМИС
В результате, загрузив данный код в контроллер стандартным способом и открыв монитор порта, можно увидеть следующие данные (см. Рис. 2.16). Причем, если оказать влияние на модуль (прикоснуться к нему пальцем или подуть на него), показания будут изменяться, поскольку изменятся влажность и температура.
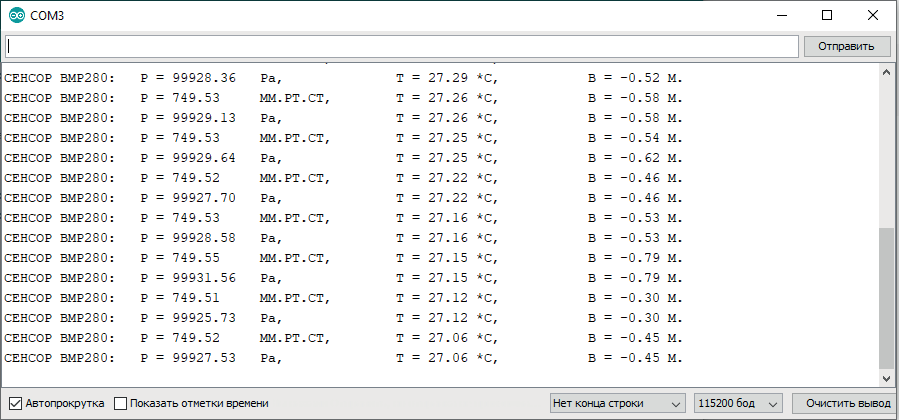 Рис. 2.16. Окно монитора порта с показаниями температуры и влажности
Рис. 2.16. Окно монитора порта с показаниями температуры и влажности
Таким образом, можно реализовать опрос модуля «Датчик температуры и влажности воздуха», построенного на базе датчика DHT.
Модуль «Драйвер двигателя постоянного тока»
Модуль «Драйвер двигателя постоянного тока» построен на микросхеме, которая способна управлять скоростью и направлением вращения двигателя постоянного тока за счет двух входных параметров: сигнала, задающего направление вращения (постоянный цифровой сигнал низкого или высокого уровня), и PWM сигнала, задающего скорость вращения двигателя. В качестве примера рассмотрим одноканальный модуль «Драйвер двигателя постоянного тока», однако, данный подход аналогичен и для модуля «Драйвер двигателя постоянного тока (2 канала)». Подключение модуля к контроллеру КПМИС выполняется в соответствии с распиновкой. Таким образом, линию модуля VCC подключим к линии 5В контроллера, линию GND – к GND контроллера, линию управления DIR и линию управления PWM – к цифровой линии. В результате, внешний вид подключенного модуля будет выглядеть как на Рис. 2.17 и Рис. 2.18.
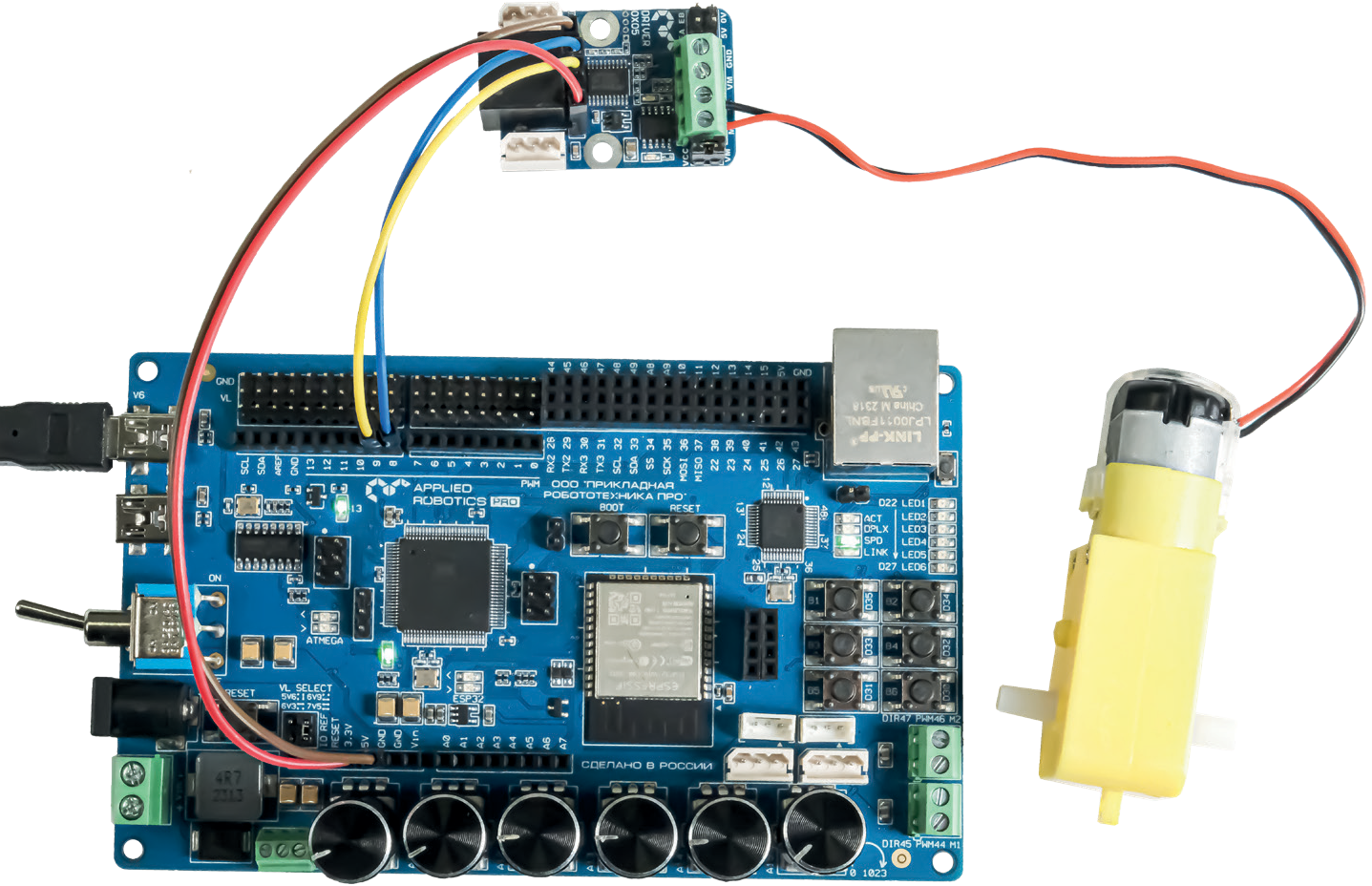 Рис. 2.17. Подключение модуля «Драйвер двигателя постоянного тока» к контроллеру КПМИС
Рис. 2.17. Подключение модуля «Драйвер двигателя постоянного тока» к контроллеру КПМИС
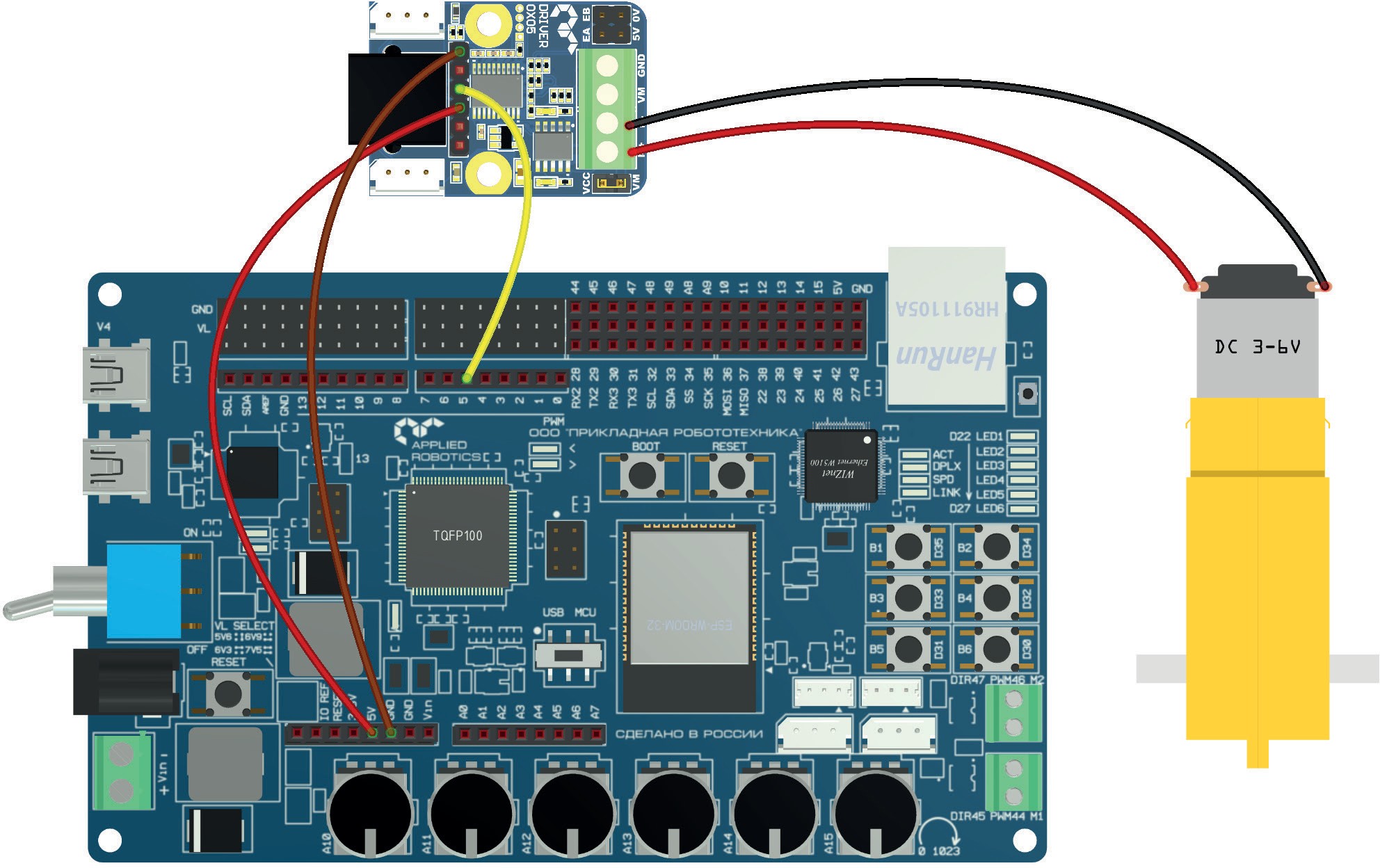 Рис. 2.18. Подключение модуля «Драйвер двигателя постоянного тока» к контроллеру КПМИС
Рис. 2.18. Подключение модуля «Драйвер двигателя постоянного тока» к контроллеру КПМИС
Соответственно, если используется двухканальный модуль драйвера двигателей, то необходимо выполнить подключение и второго драйвера двигателя аналогичным образом.
Управление драйвером выполняется стандартным образом. Для его реализации используем следующий код:
const uint8_t DirM1 = 8;
// указываем линию, к которой подключена линия управления скоростью
const uint8_t SpeedM1 = 9;
// объявляем переменную скорости uint8_t Speed = 0;
void setup(){
// инициализируем линии на выход. Устанавливаем их в значение «0»
pinMode(DirM1, OUTPUT);
digitalWrite(DirM1, LOW);
pinMode(SpeedM1, OUTPUT);
digitalWrite(DirM1, LOW);
}
void loop(){
// задаем направление вращения
digitalWrite(DirM1, LOW );
// увеличиваем скорость
while(Speed<255){
analogWrite(SpeedM1, Speed++);
delay(5);
}
// уменьшаем скорость
while(Speed>0){
analogWrite(SpeedM1, Speed--);
delay(5);
}
// меняем направление
digitalWrite(DirM1, HIGH );
// увеличиваем скорость
while(Speed<255){
analogWrite(SpeedM1, Speed++);
delay(5);
}
// уменьшаем скорость
while(Speed>0){
analogWrite(SpeedM1, Speed--);
delay(5);
}
}
В результате загрузки данного кода в контроллер, двигатель постоянного тока, подключенный к модулю насчет ускоряться в одном направлении, затем произведет снижение скорости до 0, после чего изменит направление и повторит все снова. В случае использования двухканального модуля драйверов моторов в данный код необходимо аналогичным показанному способом добавить переменные для управления мотором М2 и отправить им соответствующие команды.
Плата расширения для подключения сенсорных модулей
В качестве модуля, облегчающего подключение периферийных функциональных модулей к Arduino-совместимым контроллерам, существует плата расширения для подключения сенсорных модулей (AR-SENS-RJ14), позволяющая подключать модуль с помощью 6ти-контактного кабеля. Внешний вид платы расширения представлен на Рис. 2.19.
 Рис. 2.19. Внешний вид платы расширения AR-SENS-RJ14
Рис. 2.19. Внешний вид платы расширения AR-SENS-RJ14
На плате расширения для подключения сенсорных модулей расположены 12 комбинированных портов ввода-вывода, содержащих в своем составе по 6 линий, в которые входят как линии данных, так и линии, организующие питание модулей. Схема расположения портов и их распиновка приведены на Рис. 2.20.
Таким образом, исходя из распиновки портов разъема, при подключении к выбранному порту модуля управлять им надо линиями, относящимися к конкретному порту (линии подписаны в нотации Arduino Leonardo). К большинству портов можно подключать любые цифровые и аналоговые модули в любом порядке. Однако, из-за специфики некоторых модулей, имеются отдельные разъемы для подключения периферийных модулей, работающих по интерфейсу I2C, а также модуля
«Трехцветный светодиод», поскольку он требует 3 цифровых линии для управления. При ошибочном подключении модуль «Трехцветный светодиод» не выйдет из строя, так как питание у всех модулей унифицировано, но взаимодействовать с ним не получится.
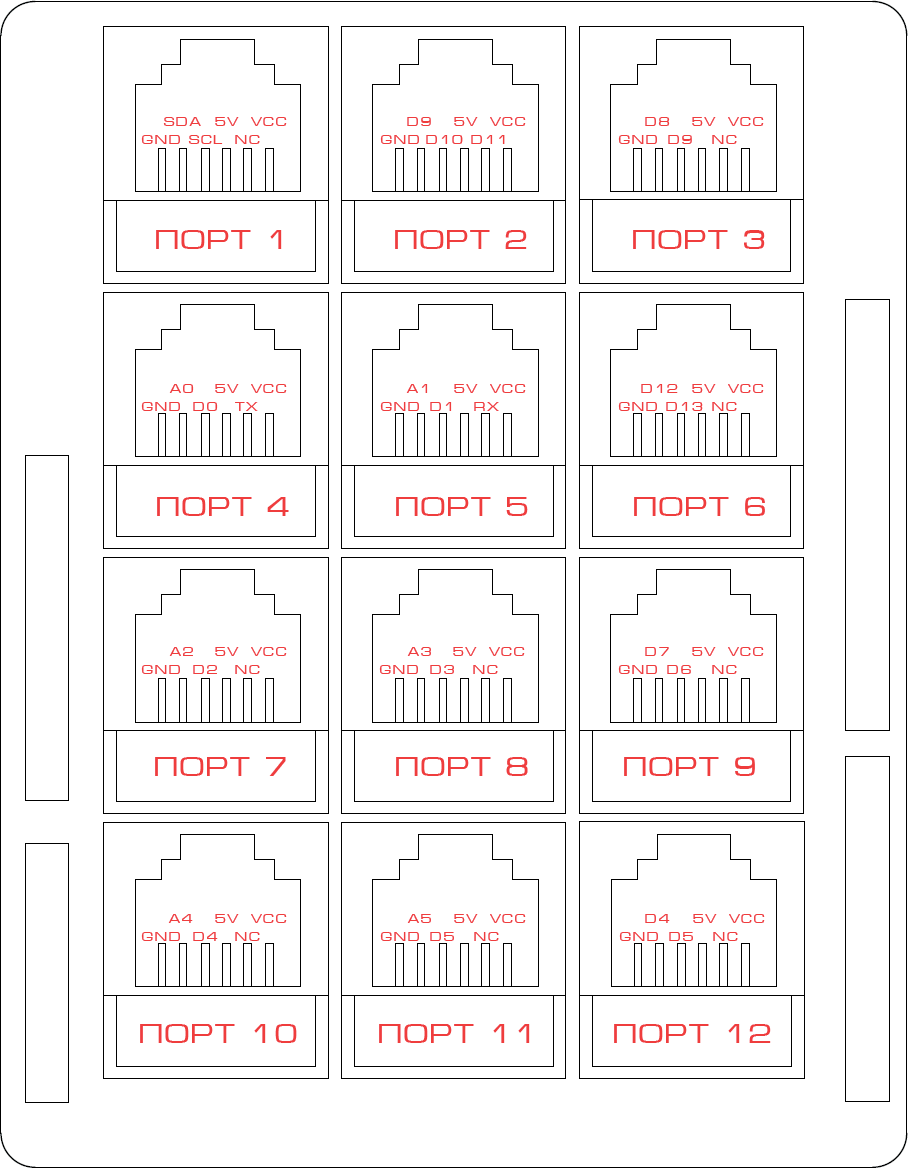 Рис. 2.20. Распиновка платы расширения AR-SENS-RJ14
Рис. 2.20. Распиновка платы расширения AR-SENS-RJ14
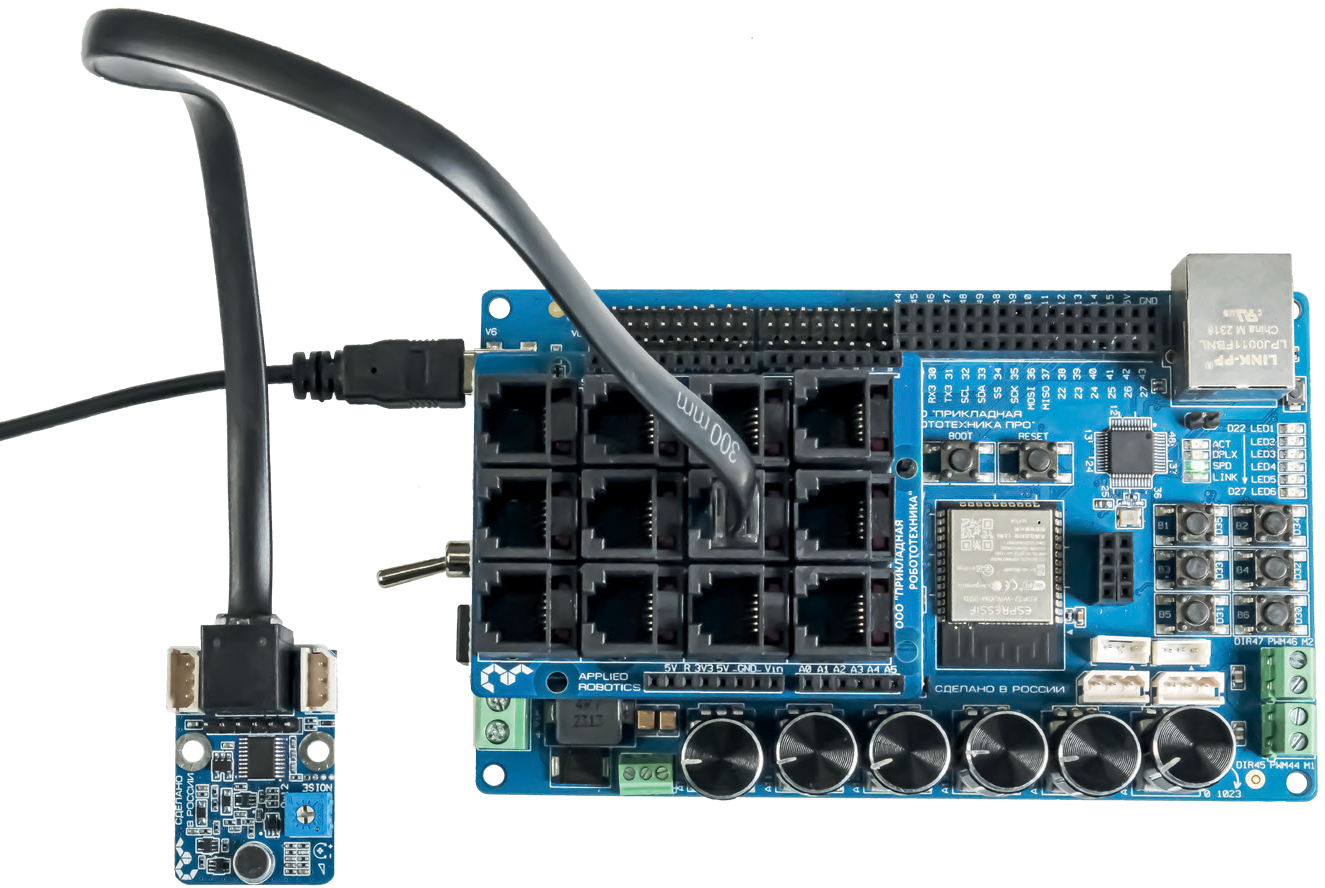 Рис. 2.21. Модуль «Датчик шума», подключенный к плате расширения AR-SENS-RJ14
Рис. 2.21. Модуль «Датчик шума», подключенный к плате расширения AR-SENS-RJ14
Для опроса модуля «Датчик шума» достаточно реализовать следующий код:
void setup() {
// инициализируем соединение по последовательному порту
Serial.begin(115200);
}
void loop() {
// читаем данные с указанного аналогового порта
int sensorValue = analogRead(A3);
// выводим данные в монитор порта
Serial.println(sensorValue);
// задаем минимальную паузу для стабильности
delay(1);
}
В данном примере происходит опрос аналогового порта А3, т.к. он физически выведен в порт №8 платы расширения. В результате, загрузив код стандартным способом, в окне монитора порта можно увидеть следующую картину (см. Рис. 2.22):
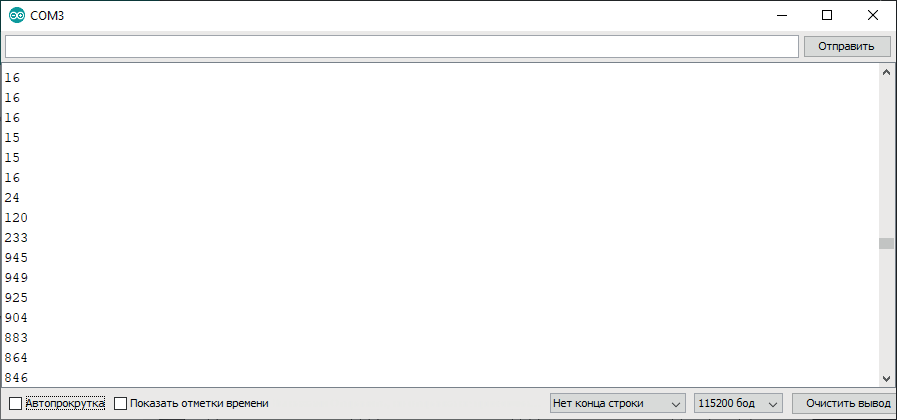 Рис. 2.22. Вывод данных с модуля «Датчик шума»
Рис. 2.22. Вывод данных с модуля «Датчик шума»
В приведенном выше окне монитора порта представлено поведение сигнала при фиксировании датчиком шума голоса. Для подстройки чувствительности модуля можно воспользоваться встроенным в модуль подстроечным резистором, тем самым, отсекая, например, фоновый шум относительно хлопков рядом с модулем.
Таким образом, используя данную плату расширения можно простым способом выполнить подключение модулей к Arduino-совместимой плате и взаимодействовать с ними, используя стандартные Arduino-совместимые подходы.
Модули, как Dynamixel-совместимые устройства
Для упрощения процесса подключения к управляющему контроллеру, а также для обеспечения возможности подключения большого количества модулей к одному управляющему контроллеру, на каждом периферийном функциональном модуле, производства ООО «Прикладная робототехника», имеется микроконтроллер, реализующий 3-пиновый интерфейс с протоколом Dynamixel. Для коммутации на каждом модуле имеется два 3-пиновых разъема Molex, позволяющих подключать модули последовательно друг за другом.
Для обмена данными с каким-либо модулем в сети периферийных модулей необходимо знать, как минимум, следующие данные о модуле:
- Его уникальный номер – ID. По умолчанию, каждый модуль имеет свой уникальный ID, однако, если необходимо использовать несколько одинаковых модулей в цепи, то необходимо изменить их ID так, чтобы их значения не повторялись. Также надо следить, чтобы не пересекались значения ID периферийных модулей и сервоприводов DYNAMIXEL, если они присутствуют в одной сети. Другими словами, нужно следить за тем, чтобы к управляющему контроллеру не было подключено одновременно несколько устройств с одинаковыми значениями ID.
- Скорость обмена данными – BAUD_RATE. По умолчанию, все устройства настроены на скорость в 57600 бод. При необходимости можно изменить данную скорость, например, для использования в цепи с сервоприводами, работающими на более низкой скорости, или при использовании длинных соединительных кабелей (чем длиннее используется кабель, тем ниже скорость рекомендуется использовать).
- Регистры памяти – значения регистров памяти модуля, с которыми нужно работать. В зависимости от типа модуля и его назначения, одни и те же номера регистров могут быть использованы либо только для чтения, либо только для записи. Либо для чтения и записи одновременно. Информация по доступным для взаимодействия регистрам, а также их назначения, приведены ниже в таблице 2.2. Также в таблице 2.2 показаны тип данных, который применяется для параметров, допустимый диапазон значений (если регламентировано) и значения, записанные в регистрах по умолчанию.
Таким образом, для взаимодействия с периферийным функциональным модулем, как с Dynamixel-совместимым устройством, необходим контроллер, поддерживающий подключение по протоколу Dynamixel, и программный пакет (библиотека) для используемой среды разработки, реализующий обмен данными. Далее будут рассмотрены способы подключения модулей к популярным рекомендуемым контроллерам.
Таблица 2.2. Описание регистров периферийных модулей
| № | Наименование модуля | Наименова- ние регистра | Адрес (DEC) |
Тип данных | Допустимый диапазон | Доступ | Базовое значение | Описание |
| Общее | MODEL_ NUMBER |
0 | R/W | Содержит номер модели | ||||
| FIRMWARE_ VERSION | 2 | R/W | Содержит версию встроенного ПО | |||||
| ID | 3 | R/W | Равно MODEL_ NUMBER | Адрес устройства Dynamixel (ID) | ||||
| BAUD_RATE | 4 | R/W | 34 (57600 бит /с) |
Содержит значение скорости обмена данными: baudrate = 2000000/(BAUD_ RATE + 1) | ||||
| 1 | Модуль «Датчик наклона» (ID 0x02) |
BALL_1_DATA | 26 | uint8_t | 0..1 | R | Возвращает состояние наклона по оси Х | |
| BALL_2_DATA | 27 | uint8_t | 0..1 | R | Возвращает состояние наклона по оси Y | |||
| 2 | Модуль «Такто- вая кнопка» (ID 0x03) | BUT_DATA | 27 | uint8_t | 0..1 | R | Возвращает состояние кнопки | |
| 3 | Модуль «Датчик цвета» (ID 0x04) | TCS3472_ CLEAR | 24 | uint16_t | 0..65535 | R | 0 | Возвращает значение яркости с фотодио- да без фильтров |
| TCS3472_RED | 26 | uint16_t | 0..65535 | R | 0 | Возвращает значение яркости с фотодио- да с красным фильтром |
||
| TCS3472_ GREEN | 28 | uint16_t | 0..65535 | R | 0 | Возвращает значение яркости с фотодио- да с зеленым фильтром | ||
| TCS3472_BLUE | 30 | uint16_t | 0..65535 | R | 0 | Возвращает значение яркости с фотодио- да с синим фильтром |
||
| TCS3472_LUX | 32 | uint16_t | R | Возвращает значение освещенности в люксах | ||||
| TCS3472_ CTEMP |
34 | uint16_t | 0..65535 | R | Возвращает значение цветовой темпера- туры в Кельвинах |
|||
| TCS3472_HUE | 36 | uint16_t | 0..360 | R | Возвращает цветовые координаты по шкале HSV |
|||
| TCS3472_GAIN | 38 | uint8_t | 0..3 | R | Программное усиление (как у фотоап- парата) | |||
| TCS3472_ COLOR | 40 | uint8_t | R | Возвращает одно из десяти значений цветовых оттенков (Черный, белый, красный, оранжевый, желтый, зеленый, голубой, синий, фиолетовый, розовый) | ||||
| TCS3472_ LIGHT | 42 | uint8_t | 0..255 | W | 0 | Задает яркость светодиода подсветки | ||
| TCS3472_ BLACK_LVL |
46 | uint16_t | 0..65535 | W | 850 | Задает порог освещенности, до которо- го цвет считается черным |
||
| TCS3472_ WHITE_LVL | 48 | uint8_t | 0..65535 | W | 7 | Задает минимальную разницу между нормированными значениями красного, зеленого и синего (дающих в сумме 255), более которой считается, что определен оттенок цвета, а не белый цвет |
||
| 4 | Модуль «Драй- вер двигателя постоянного тока» (ID 0x05) | MAX_POWER | 24 | uint16_t | 0..1023 | W | 1023 | Задает максимальную мощность двигателя при работе автоматической системы управления |
| ENCODER_ MODE | 27 | uint8_t | 1..3 | W | 0 | Задает режим работы энкодера: 0 - выключен 1 - AB - чтение 4х фронтов 2- A rising and falling - чтение только канала A 3- A rising only - чтение 1 фронта канала А |
||
| POWER | 28 | uint16_t | -1023..1023 | W | 0 | Задает мощность двигателя при прямом управлении с учетом направления | ||
| ENCODER | 32 | uint16_t | -32768..32767 | R | Возвращает количество тиков энкодера | |||
| PRESENT_ SPEED | 34 | uint16_t | -32768..32767 | R | Возвращает значение текущей скорости в виде количество тиков энкодера / 100 мс | |||
| GOAL_SPEED | 40 | uint16_t | -1000..1000 | W | 0 | Задает значение требуемой скорости в виде количество тиков энкодера / 100 мс | ||
| CONTROL_ PERIOD | 45 | uint8_t | 1..100 | W | 50 | Задает длительность цикла управления (рекомендуется не менее 5 мс) | ||
| PID_P | 47 | uint8_t | 0..255 | W | 16 | Задает значение пропорциональной составляющей ПИД-регулятора | ||
| PID_I | 48 | uint8_t | 0..255 | W | 32 | Задает значение интегральной состав- ляющей ПИД-регулятора |
||
| PID_D | 49 | uint8_t | 0..255 | W | 0 | Задает значение дифференциальной составляющей ПИД-регулятора | ||
| 5 | Модуль «Драй- вер двигателя постоянного тока (2 канала)» (ID 0x06) |
MAX_POWER | 24 | uint16_t | 0..1023 | W | 1023 | Задает максимальную мощность двигателя при работе автоматической системы управления |
| ENCODER_ MODE | 27 | uint8_t | 1..3 | W | 0 | Задает режим работы энкодера: 0 - выключен 1 - AB - чтение 4х фронтов 2- A rising and falling - чтение только канала A 3- A rising only - чтение 1 фронта канала А |
||
| M1_POWER | 28 | uint16_t | -1023..1023 | W | 0 | Задает мощность двигателя М1 при пря- мом управлении с учетом направления | ||
| M2_POWER | 30 | uint16_t | -1023..1023 | W | 0 | Задает мощность двигателя М2 при пря- мом управлении с учетом направления |
||
| M1_ENCODER | 32 | uint16_t | -32768..32767 | R | Возвращает количество тиков энкодера двигателя М1 | |||
| M1_PRESENT_ SPEED | 34 | uint16_t | -32768..32767 | R | Возвращает значение текущей скорости двигателя М1 в виде количество тиков энкодера / 100 мс | |||
| M2_ENCODER | 36 | uint16_t | -32768..32767 | R | Возвращает количество тиков энкодера двигателя М2 | |||
| M2_PRESENT_ SPEED | 38 | uint16_t | -32768..32767 | R | Возвращает значение текущей скорости двигателя М2 в виде количество тиков энкодера / 100 мс | |||
| M1_GOAL_ SPEED | 40 | uint16_t | -1000..1000 | W | 0 | Задает значение требуемой скорости двигателя М1 в виде количество тиков энкодера / 100 мс | ||
| M2_GOAL_ SPEED | 42 | uint16_t | -1000..1000 | W | 0 | Задает значение требуемой скорости двигателя M2 в виде количество тиков энкодера / 100 мс | ||
| CONTROL_ PERIOD | 45 | uint8_t | 1..100 | W | 50 | Задает длительность цикла управления (рекомендуется не менее 5 мс) | ||
| PID_P | 47 | uint8_t | 0..255 | W | 16 | Задает значение пропорциональной составляющей ПИД-регулятора обоих двигателей | ||
| PID_I | 48 | uint8_t | 0..255 | W | 32 | Задает значение интегральной составля- ющей ПИД-регулятора обоих двигате- лей | ||
| PID_D | 49 | uint8_t | 0..255 | W | 0 | Задает значение дифференциальной составляющей ПИД-регулятора обоих двигателей | ||
| 6 | Модуль «ИК энкодер» (ID 0x07) | COUNT_DATA | 26 | uint32_t | R | Возвращает количество тиков | ||
| RESET_ ENCODER | 30 | uint8_t | 0..1 | W | Сбрасывает значение энкодера | |||
| 7 | Модуль «Свето- диод» (ID 0x09) | LED_DATA | 26 | uint8_t | 0..255 | W | 0 | Задает интенсивность свечения свето- диода |
| 8 | Модуль «Потен- циометр» (ID 0x13) | POT_DATA | 26 | uint16_t | 0..1023 | R | Возвращает значение потенциометра | |
| 9 | Модуль «Трех- цветный свето- диод» (ID 0x15) | GREEN_LED_ DATA | 26 | uint8_t | 0..255 | W | 0 | Задает интенсивность свечения зеленой составляющей светодиода |
| RED_LED_DATA | 27 | uint8_t | 0..255 | W | 0 | Задает интенсивность свечения красной составляющей светодиода |
||
| BLUE_LED_ DATA | 28 | uint8_t | 0..255 | W | 0 | Задает интенсивность свечения синей составляющей светодиода | ||
| 10 | Модуль «Сило- вой ключ» (ID 0x11) | MOS_FREQ | 26 | uint16_t | 200..5000 | W | 220 | Задает значение частоты |
| MOS_POR | 28 | uint8_t | 0..255 | W | 0 | Задает значение скважности | ||
| 11 | Модуль «Звуковой пьезоизлуча- тель» (ID 0x18) |
MOS_FREQ | 26 | uint16_t | 200..5000 | W | 220 | Задает значение частоты |
| MOS_POR | 28 | uint8_t | 0..255 | W | 0 | Задает значение скважности | ||
| 12 | Модуль «Датчик шума» (ID 0x12) |
SOUND_DATA | 26 | uint8_t | 0..255 | R | Возвращает уровень звука | |
| SOUND_ DETECTED_ COUNT | 27 | uint8_t | 0..255 | R | 0 | Возвращает количество хлопков | ||
| SOUND_ DETECTED_ TIME | 28 | uint16_t | R | 0 | Возвращает время последнего хлопка | |||
| SOUND_ THRESHOLD_ VALUE | 30 | uint8_t | 0..255 | W | 200 | Задает пороговое значение для детек- тирования хлопка | ||
| 13 | Модуль «Датчик линии» (ID 0x0A) |
LINE_DATA | 27 | uint8_t | 0..1 | R | Возвращает состояние датчика линии | |
| 14 | Модуль «Конце- вой выключа- тель» (ID 0x17) | USW_DATA | 27 | uint8_t | 0..1 | R | Возвращает состояние микропереклю- чателя | |
| 15 | Модуль «ИК при- емник» (ID 0x08) (совместим с пультом RC100) | REMCON_IR_ DATA | 26 | uint16_t | R | Возвращает код нажатой кнопки | ||
| REMCON_IR_ ARRIVED | 28 | uint8_t | R | Возвращает сигнал о наличии данных | ||||
| 16 | Модуль «Датчик атмосферного давления» (ID 0x14) | BMP_PRESS_32 | 24 | uint32_t | 30000.. 110000 |
R | Возвращает значение давление в Па (1000 = 1 кПа) | |
| BMP_ALT_32 | 28 | int32_t | -5000..90000 | R | Возвращает значение высоты в дм. (567 = 56.7 м над уровнем моря) |
|||
| BMP_PRESS_16 | 32 | uint16_t | 0..65535 | R | Возвращает давление в даПа (100 = 1кПа) | |||
| BMP_ALT_16 | 34 | int16_t | -5000..32767 | R | Возвращает значение высоты в дм. (567 = 56.7 м над уровнем моря) |
|||
| BMP_TEMP_16 | 36 | int16_t | -4000..8500 | R | Возвращает значение температуры в сотых градуса (2500 = 25 0С) | |||
| BMP_CFG_F4 | 38 | uint8_t | 0..255 | W | Регистр F4 конфигурации датчика | |||
| BMP_CFG_F5 | 40 | uint8_t | 0..255 | W | Регистр F5 конфигурации датчика | |||
| BMP_UPDATE | 42 | uint8_t | 0..1 | W | При записи в этот регистр 1 к датчику применяются настройки регистров BMP_CFG_F4 и BMP_CFG_F5 | |||
| 17 | Модуль «Датчик температуры и влажности воздуха» |
DTH11_RH_INT | 24 | uint8_t | 0..100 | R | Возвращает целую часть от значения влажности | |
| DTH11_RH_ DEC |
26 | uint8_t | 0..9 | R | Возвращает десятичную часть значения влажности |
|||
| DTH11_TEMP_ INT | 28 | int8_t | -40..80 | R | Возвращает целую часть от значения температуры | |||
| DTH11_TEMP_ DEC |
30 | uint8_t | 0..9 | R | Возвращает десятичную часть от значе- ния температуры |
|||
| DTH11_ TEMP16 | 34 | int16_t | -400..800 | R | Возвращает значение температуры | |||
| 18 | Модуль «Датчик силы» (ID 0х20) | FORCE_DATA | 26 | uint16_t | 0..1023 | R | Возвращает значение силы нажатия (площадь пятна) | |
| 19 | Модуль «Датчик освещенности» (ID 0х19) |
LIGHT_DATA | 26 | uint16_t | 0..1023 | R | Возвращает значение освещенности | |
| 20 | Модуль «Уль- тразвуковой дальномер» (ID 0x2A) | MEAS_ CONTROL | 25 | uint8_t | 0…1 | W | Включение замера данных | |
| RESULT_0 | 26 | uint16_t | XZ | R | Тут данные № 1 | |||
| RESULT_1 | 27 | uint8_t | XZ | R | Тут данные № 2 | |||
| MEASUREMENT_ TIMEOUT | 28 | uint16_t | XZ | R | Ошибка измерения | |||
| 21 | Модуль «Джойстик» (ID 0х25) |
POTX_0_DATA | 26 | uint8_t | 0….1024 | R | Возвращает значение по горизонтали (верх либо низ) | |
| POTX_1_DATA | 27 | uint8_t | 0….1024 | R | Возвращает значение по горизонтали (верх либо низ) |
|||
| POTY_0_DATA | 28 | uint8_t | 0….1024 | R | Возвращает значение по вертикали (верх либо низ) | |||
| POTY_1_DATA | 29 | uint8_t | 0….1024 | R | Возвращает значение по вертикали (верх либо низ) |
|||
| BUT_DATA | 31 | uint8_t | 0…. 1 | Возвращает значение |
Подключение к Arduino-контроллерам
На классических Arduino-контроллерах (таких как Mega2560, UNO, Leonardo) не встречается интерфейс Dynamixel. Поэтому для подключения к ним Dynamixel-совместимых устройств необходимо использовать платы расширения, реализующие требуемый интерфейс. Пример платы расширения показан на Рис. 2.23.
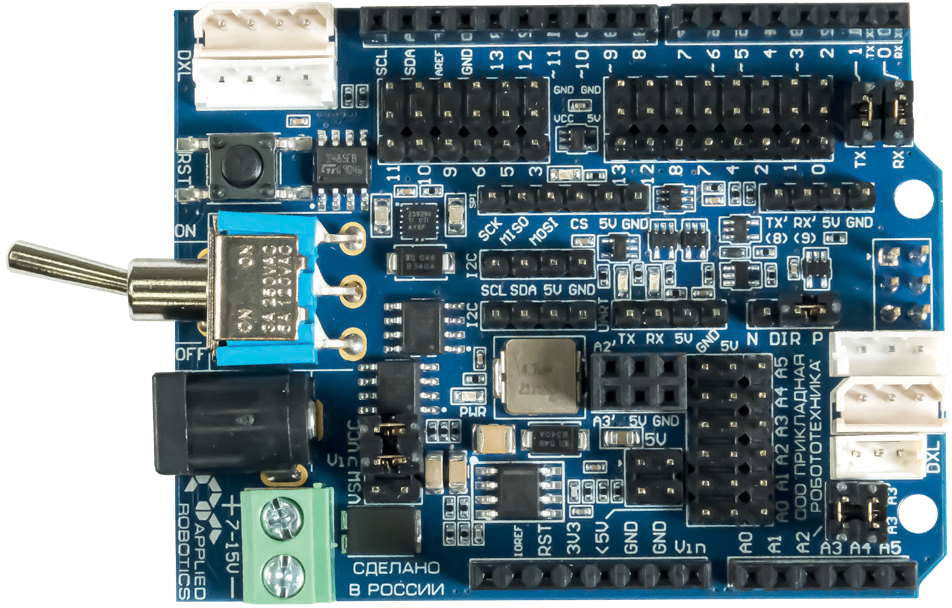 Рис. 2.23. Плата расширения с интерфейсом Dynamixel, разработанная ООО “Прикладная робототехника”
Рис. 2.23. Плата расширения с интерфейсом Dynamixel, разработанная ООО “Прикладная робототехника”
Данные платы расширения совместимы с популярными Arduino и Arduino-подобными контроллерами и позволяют обеспечивать необходимое питание подключаемых устройств и реализовывать как 3х-пиновый, так и 4х-пиновый интерфейсы Dynamixel.
Для реализации обмена данными через такие платы расширения существуют несколько программных пакетов (библиотек) для среды разработки Arduino IDE, разработанных как сообществом, так и производителями решений. Например, библиотека «DynamixelShield Library for Arduino», разработанная компанией ROBOTIS (https://github.com/ ROBOTIS-GIT/DynamixelShield).
Помимо плат расширения, реализующих интерфейс Dynamixel, существуют Arduino-подобные платы сторонних производителей, содержащих требуемый интерфейс. Такие платы, как правило, делаются на основе микроконтроллеров Atmega16u2 и Atmega2560. ООО «Прикладная робототехника» также производит собственные Arduino-подобные контроллеры, содержащие интерфейс Dynamixel. Самыми популярными среди таких контроллеров являются: «Программируемый контроллер моделей инженерных систем» («Контроллер КПМИС») (см. Рис. 2.24) и
«Универсальный вычислительный контроллер DXL-IoT» (см. Рис. 2.25).
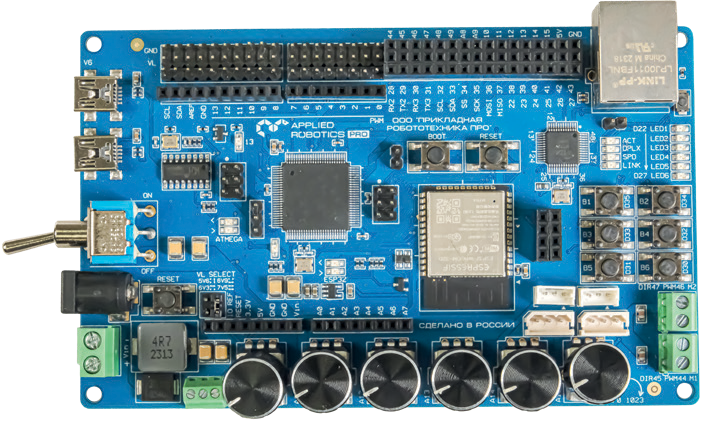 Рис. 2.24. Контроллер КПМИС
Рис. 2.24. Контроллер КПМИС
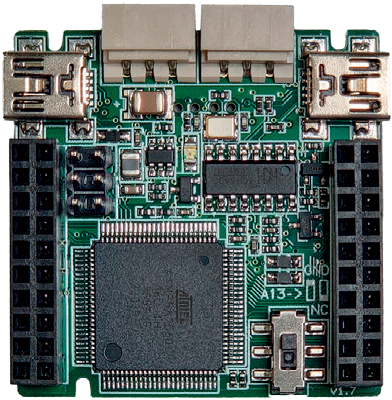 Рис. 2.25. Универсальный вычислительный
Рис. 2.25. Универсальный вычислительный
контроллер DXL-IoT
По своей сути оба этих устройства являются полноценными контроллерами. Отличием является лишь то, что «Контроллер КПМИС» имеет на своей плате большой набор всевозможных элементов управления, индикаторов и интерфейсов (как проводных, так и беспроводных), а «Универсальный вычислительный контроллер DXL-IoT» представляет собой компактный модуль (с габаритами 40х40 мм), рассчитанный на встраиваемые системы и применение в среде «Интернета вещей» (Internet of Things – IoT). Оба этих контроллера построены на базе микроконтроллера Atmega2560 и могут быть запрограммированы с помощью среды Arduino IDE как плата Arduino Mega2560. Подробнее про «Контроллер КПМИС» можно прочитать в учебном пособии «Программирование моделей инженерных систем», а про «Универсальный вычислительный контроллер DXL-IoT» в одноименном учебном пособии.
В составе обоих контроллеров имеется по два 3х-пиновых порта для подключения Dynamixel-совместимых устройств. В случае «Контроллера КПМИС», питание на эти устройства подается напрямую с платы контроллера, если сам контроллер при этом подключен к источнику питания 12В. В случае «Универсального вычислительного контроллера DXL-IoT» питание 12В необходимо подать извне через 3х-пиновые разъемы, например, используя адаптер питания SMPS2Dynamixel.
Библиотека DxlMaster
Устройства Dynamixel: сервоприводы и датчики, поддерживающие протокол Dynamixel 1.0, подключаются к интерфейсу на основе последовательного порта UART в режиме полудуплекса. Для управления Dynamixel-cовместимыми устройствами c Arduino-подобных контроллеров производства ООО «Прикладная робототехника» необходимо использовать библиотеку «DxlMaster», которую вы можете скачать с сайта компании ООО «Прикладная робототехника» (раздел «Программное обеспечение»). Данная библиотека поставляется в виде zip-библиотеки Arduino и устанавливается штатными средствами Arduino IDE (Меню
«Скетч» -> «Подключить библиотеку» -> «Добавить .ZIP библиотеку»).
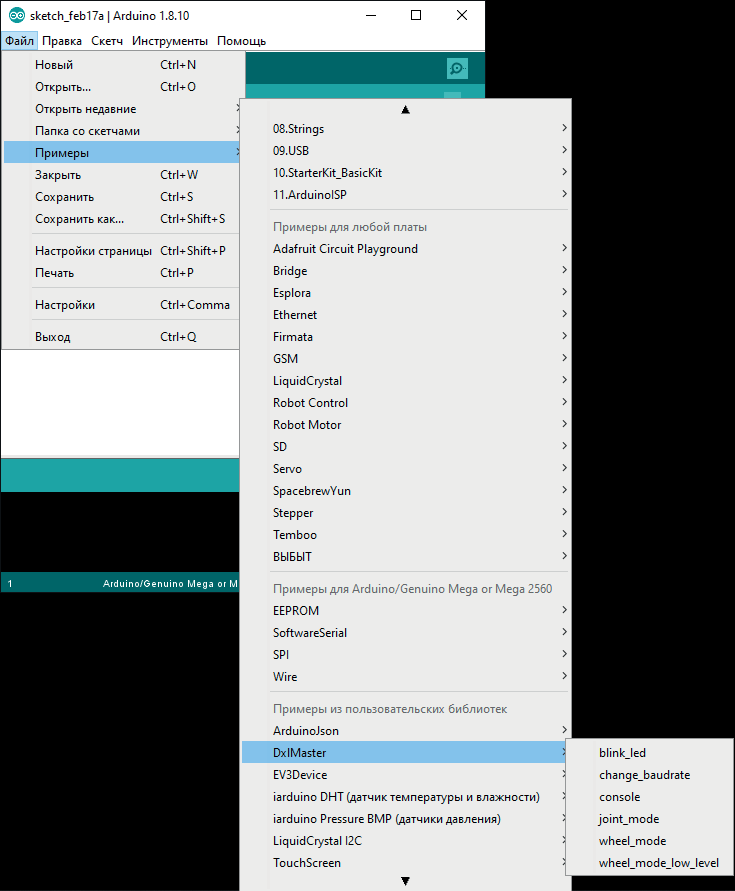 Рис. 2.26. Примеры для библиотеки DxlMaster
Рис. 2.26. Примеры для библиотеки DxlMaster
Библиотека содержит следующие примеры (меню «Файл» -> «Примеры») (см. Рис. 2.26):
- blink_led – включение и выключение светодиодов сервоприводов DYNAMIXEL.
- change_baudrate – изменение скорости передачи данных на шине Dynamixel.
- console – терминал, позволяющий из командной строки найти и настроить Dynamixel-совместимые устройства в сети.
- joint_mode – управление сервоприводами по положению (режим шарнирного сочленения).
- wheel_mode – управление сервоприводами по скорости (режим колеса).
- wheel_mode_low_level – управление сервоприводами на низком уровне (изменением значений регистров).
Инициализация библиотеки
Во всех случаях использования библиотеку «DxlMaster» необходимо добавить в программу и инициализировать. Для добавления библиотеки необходимо добавить следующий заголовочный файл в начале программы:
#include «DxlMaster.h»
При добавлении заголовочного файла библиотеки становится доступен глобальный объект DxlMaster, который необходимо инициализировать следующим образом:
DxlMaster.begin(int baudrate);
где baudrate – скорость обмена данными с устройствами на шине Dynamixel (см. документацию к конкретной модели привода). Чаще всего используются скорости 57 600 бод и 1 000 000 бод. Скорость обмена данными с Dynamixel – совместимым устройством может быть изменена через программу ROBOTIS Dynamixel Wizard, либо используя пример change_baudrate.
Подключение произвольных устройств, класс DynamixelDevice
Обмен данными с Dynamixel – совместимыми устройствами происходит путем записи и чтения регистров в памяти такого устройства. Для этого предназначен класс DynamixelDevice библиотеки «DxlMaster».
Общие методы класса DxlMaster:
DxlMaster(uint8_t id)– конструктор, id – уникальный номер устройства Dynamixel в сети (см. документацию на устройство). Может быть изменен в программе ROBOTIS Dynamixel Wizard.DynamixelStatus init()– поиск и инициализация устройства. Если найдено устройство с адресом id и скоростью обмена, соответствующей текущим настройкам шины, возвращает 0, иначе – код ошибки.DynamixelStatus changeId(uint8_t id)- изменение id устройства (для этого устройство все равно должно быть инициализировано с исходным id).uint16_t model()– возвращает номер модели устройства.uint8_t firmware()– возвращает версию прошивки устройств.void communicationSpeed(uint32_t aSpeed)– изменение скорости обмена данными с устройством.
Обмен данными:
Все методы для обмена данными возвращают статус выполнения команды DynamixelStatus, принимающий значение «0» в случае успеха или выдающий номер стандартной ошибки шины Dynamixel, в случае сбоя обмена данными.
Методы чтения данных выполнены в виде шаблонов для чтения регистров разной длины (чаще всего в Dynamixel – совместимых устройствах применяются регистры типов uint8_t, uint16_t), например:
template DynamixelStatus read(uint8_t aAddress, T& aData) – шаблон метода для чтения регистра произвольного типа T по адресу aAdress.
Пример использования:
uint16_t pos; device.read(DYN_ADDRESS_CURRENT_POSITION, pos);
После успешного выполнения команды в переменной pos окажется значение 16-ти разрядного регистра DYN_ADDRESS_CURRENT_POSITION, который занимает в памяти сервопривода 2 байта.
Методы для обмена данными:
DynamixelStatus read(uint8_t aAddress, T& aData)– чтение регистра типа T по адресу aAddress с записью результата в переменную aData.DynamixelStatus read(uint8_t aAddress, uint8_t size, uint8_t *ptr)– чтение массива из регистров, в количестве size по адресу aAddress с записью результата в массив по адресу ptr.DynamixelStatus write(uint8_t aAddress, const T& aData)– запись в регистр типа T по адресу aAddress значения aData.DynamixelStatus write(uint8_t aAddress, uint8_t size, const uint8_t *ptr)-запись в массив регистров, длиной size, по адресу aAddress значений из локального массива с указателем ptr.DynamixelStatus regWrite(uint8_t aAddress, const T& aData)**– команда отложенной записи в регистр типа T по адресу aAddress значения aData. Значение передается на устройство, но применяется к регистру только после команды action()**.DynamixelStatus regWrite(uint8_t aAddress, uint8_t size, const uint8_t*ptr)- команда отложенной записи в массив регистров, длиной size, по адресу aAddress значений из локального массива по указателю ptr.DynamixelStatus action()– команда, получив которую все устройства в сети применяют значения регистров, полученные с командой отложенной записи. Функция применяется для организации синхронной работы сервоприводов: вначале всем сервоприводам рассылаются целевые значения (положение, скорость), а затем широковещательной командой «action» приводы запускаются.DynamixelStatus ping()– команда для проверки наличия устройства в сети. В случае, если устройство найдено, возвращает значение «0», иначе – код ошибки.
Примечание. Для отправки широковещательных команд необходимо создать абстрактное устройство DynamixelDevice с широковещательным адресом.
Пример низкоуровнего управления сервоприводом DYNAMIXEL MX-28:
#include «DxlMaster.h» // Добавление библиотеки
DynamixelDevice device(1); // Создание объекта управления с адресом id = 1
void setup() {
DxlMaster.begin(1000000); // Инициализация шины со скоростью 1000000 бод
device.init(); // Поиск в сети и инициализация устройства
device.write(DYN_ADDRESS_ENABLE_TORQUE, 1); // Включение момента
uint16_t zero_limit = 0;
device.write(DYN_ADDRESS_CW_LIMIT, zero_limit); // Очистка ограничения вращения по часовой стрелке
device.write(DYN_ADDRESS_CCW_LIMIT, zero_limit); // Очистка ограничения вращения против часовой стрелки
}
void loop() {
int16_t speed = 1000;
device.write(DYN_ADDRESS_GOAL_SPEED, speed); // Установка скорости
}
Подключение сервоприводов, класс DynamixelMotor
Для более удобного управления сервоприводами DYNAMIXEL, необходимо применять ориентированный на такое использование класс DynamixelMotor, наследующий класс DynamixelDevice вместе со всеми представленными в предыдущем разделе методами. Дополнительно к методам класса DynamixelDevice в классе DynamixelMotor реализованы следующие специальные методы.
void wheelMode()– настраивает регистры привода для работы в режиме колеса.void jointMode(uint16_t aCWLimit=0, uint16_t aCCWLimit=0x3FF)– настраивает привод для управления по положению (режим шарнирного сочленения) с ограничениями углов поворота по и против часовой стрелки (aCWLimit и aCCWLimit, соответственно).void enableTorque(bool aTorque=true)– включает момент, регистр целевого положения принимает значение текущего положения, и сервопривод удерживает текущее положение.void speed(int16_t aSpeed)– задает скорость вращения привода в режиме колеса, либо максимальную скорость вращения в режиме сочленения.void goalPosition(uint16_t aPosition)– задает целевое положение при управлении по положению.void led(uint8_t aState)– управляет светодиодом сервопривода: aState = 0 – выключение, aState = 1 – включение.uint16_t currentPosition()– опрашивает и возвращает показания о текущем угловом положении сервопривода.DynamixelStatus getCurrentPosition(uint16_t &pos)– метод аналогичен предыдущему, но возвращает статус выполнения команды для построения более надежных систем управления.
Пример управления мотором:
#include «DxlMaster.h» // Добавление библиотеки
DynamixelMotor motor(1); // Создание объекта класса сервопривода с адресом 1
void setup() {
DxlMaster.begin(1000000); // Инициализация шины Dynamixel со скоростью 1000000 бод
motor.enableTorque(); // Включение момента привода
motor.jointMode(204, 820); // Включение режима сочленения с угловыми ограничениями
motor.speed(100); // Задание максимальной скорости вращения привода
}
void loop() {
motor.goalPosition(123); // Задание положения привода
}
Далее будут приведены ряд примеров взаимодействия с периферийными модулями, как с Dynamixel-совместимыми устройствами, используя управляющую плату «Контроллер КПМИС» и библиотеку «DxlMaster». Подключение модулей к контроллеру выполняется с помощью 3х-пинового кабеля к любому разъему на плате и на модуле. Пример подключения модуля «Потенциометр» показан на Рис. 2.27. Остальные модули подключаются аналогичным образом.
Опрос модуля «Потенциометр»
Модуль «Потенциометр» имеет значение ID «0х13», что в десятичной записи составляет 19. Данные хранятся в двух регистрах памяти: в 26 регистре малый байт, в 27 большой, поэтому суммарно показания датчика варьируются от 0 до 1023 (до 8 бит в малом и до 2 бит в большом). Чтение данных из регистров реализовано через метод DynamixelStatus read.
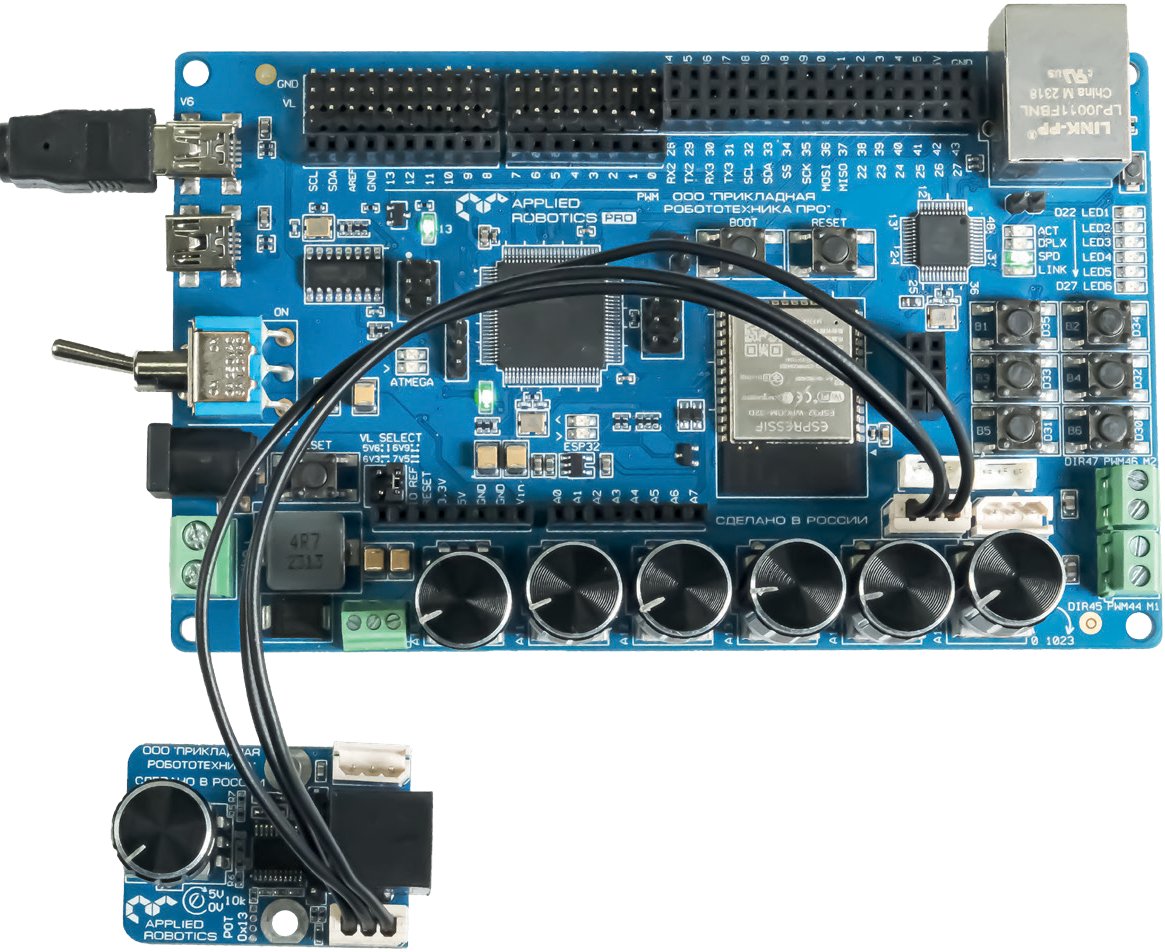 Рис. 2.27. Подключение модулей по интерфейсу Dynamixel на примере подключения модуля «Потенциометр»
Рис. 2.27. Подключение модулей по интерфейсу Dynamixel на примере подключения модуля «Потенциометр»
#include “DxlMaster.h”
const unsigned long dynamixel_baudrate = 57600;
const unsigned long serial_baudrate = 57600;
const uint8_t id = 19;
uint8_t a;
uint8_t b;
DynamixelDevice pot(id);
void setup() {
DxlMaster.begin(dynamixel_baudrate);
pot.init();
Serial.begin(serial_baudrate);
}
void loop() {
pot.read(26, a); // малый регистр от 0 до 255
pot.read(27, b); // большой регистр от 1*256 до 3*256
Serial.print(“Pot position: “);
Serial.print((a + 256*b)/10.23);
Serial.print(“%\n”);
delay(1000);
}
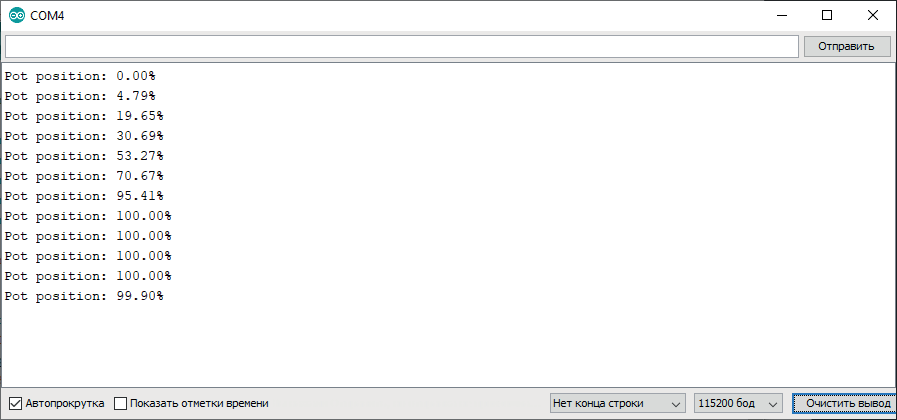 Рис. 2.28. Окно монитора порта с показаниями модуля «Потенциометр»
Рис. 2.28. Окно монитора порта с показаниями модуля «Потенциометр»
Приведенная выше программа выводит в монитор последовательного порта информацию о положении потенциометра в диапазоне от 0% до 100% (см. Рис. 2.28).
Опрос модуля «Тактовая кнопка»
Значение ID модуля «Тактовая кнопка» 0х03, что в десятичной записи составляет 3. Статус нажатия хранится в 27 регистре и представляет собой один изменяющийся бит во всем регистре.
#include “DxlMaster.h”
const unsigned long dynamixel_baudrate = 57600;
const unsigned long serial_baudrate = 57600;
const uint8_t id = 3;
uint8_t a;
DynamixelDevice but(id);
void setup() {
DxlMaster.begin(dynamixel_baudrate);
but.init();
Serial.begin(serial_baudrate);
}
void loop() {
but.read(27, a); // значение «0» - кнопка не нажата, «1» - нажата
if (a==0)
{
Serial.print(“Button is not pressed\n”);
}
else
{
Serial.print(“Button pressed\n”);
}
delay(1000);
}
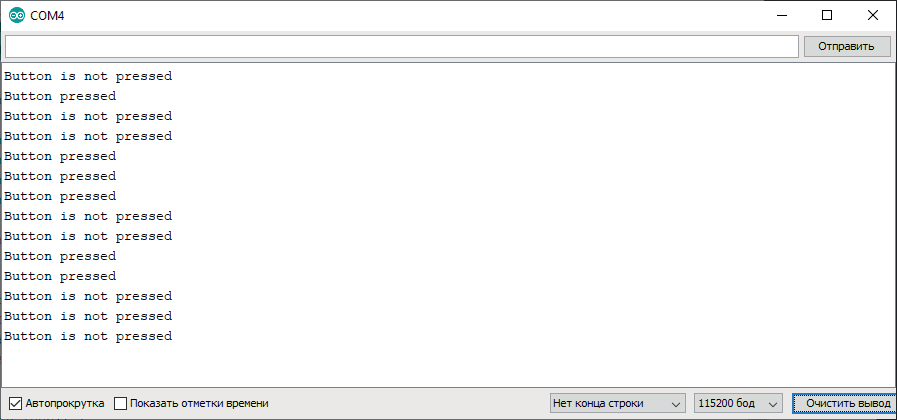 Рис. 2.29. Окно монитора порта с показаниями модуля «Тактовая кнопка»
Рис. 2.29. Окно монитора порта с показаниями модуля «Тактовая кнопка»
В данной программе регистр опрашивается с периодом в одну секунду и, в зависимости от статуса нажатия кнопки, выводит в монитор последовательного порта соответствующую информацию (см. Рис. 2.29).
Опрос модуля «Датчик линии»
Значение ID модуля «Датчик линии» - 0х0A, что составляет в десятичной записи 10. Данные детектирования линии хранятся в 27 регистре и представляют собой один изменяемый бит либо фотопара фиксирует отражение сигнала, либо нет.
#include “DxlMaster.h”
const unsigned long dynamixel_baudrate = 57600;
const unsigned long serial_baudrate = 57600;
const uint8_t id = 10;
uint8_t a; DynamixelDevice line(id);
void setup() {
DxlMaster.begin(dynamixel_baudrate);
line.init();
Serial.begin(serial_baudrate);
}
}
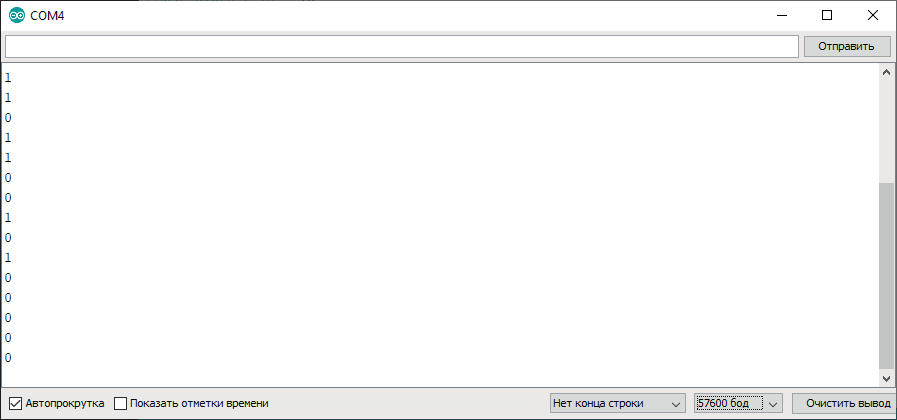 Рис. 2.30. Окно монитора порта с показаниями модуля «Датчик линии»
Рис. 2.30. Окно монитора порта с показаниями модуля «Датчик линии»
Опрос модуля «Датчик силы»
Значение ID модуля «Датчик силы» - 0x20, что составляет в десятичной записи - 32. Данные о силе нажатия приходят в регистр 26 и занимает 2 байта.
#include «DxlMaster2.h»
//Подключаем библиотеку для работы с Dynamixel устройствами
const unsigned long dynamixel_baudrate = 57600;
//Выставляем скорость обмена данными с Dynamixel устройствами
const unsigned long serial_baudrate = 57600;
//Выставляем скорость сериал порта
const uint8_t id = 32; //ID Датчика uint16_t strength = 0;
DynamixelDevice power(id); //Объявляем Dynamixel устройство
void setup() {
DxlMaster.begin(dynamixel_baudrate); //Начинаем работу библиотеки
power.init(); //Инициализируем устройство
Serial.begin(serial_baudrate);
}
void loop() { power.read(26,strength);
//Считываем силу нажатия и записываем в переменную strength
Serial.println(strength);
delay(500);
}
Опрос модуля «Датчик освещенности»
Значение ID модуля «Датчик освещенности» - 0x19, что составляет в десятичной записи - 25. Данные о освещенности приходят в регистр 26 и занимает 2 байта.
#include «DxlMaster2.h»
//Подключаем библиотеку для работы с Dynamixel устройствами
const unsigned long dynamixel_baudrate = 57600;
//Выставляем скорость обмена данными с Dynamixel устройствами
const unsigned long serial_baudrate = 57600;
//Выставляем скорость сериал порта
const uint8_t id = 25;//ID Датчика
uint16_t brightness = 0;
DynamixelDevice light(id);
//Объявляем Dynamixel устройство
void setup() {
DxlMaster.begin(dynamixel_baudrate); //Начинаем работу библиотеки
light.init(); //Инициализируем устройство
Serial.begin(serial_baudrate);
}
void loop() {
light.read(26,brightness); //Считываем уровень освещенности
Serial.println(brightness);
delay(500);
}
Опрос модуля «Ультразвуковой дальномер»
Значение ID модуля «Ультразвуковой дальномер» - 0x2A, что составляет в десятичной записи - 42. Для измерения необходимо записать 1 в регистр 25. Это запустит измерение датчика. Данные же приходят в регистры 26, 27 и занимает по 2 байта.
#include «DxlMaster2.h»
//Подключаем библиотеку для работы с Dynamixel устройствами
const unsigned long dynamixel_baudrate = 57600;
//Выставляем скорость обмена данными с Dynamixel устройствами
const unsigned long serial_baudrate = 57600;
//Выставляем скорость сериал порта
const uint8_t id = 34;//ID Датчика
const uint8_t start_echo = 25; //Регистр в который начинает измерение
const uint8_t result_0 = 26; //Регистр измерения
uint8_t sum = 0; uint8_t mas[2];
DynamixelDevice dist(id); //Объявляем Dynamixel устройство
void setup() {
DxlMaster.begin(dynamixel_baudrate); //Начинаем работу библиотеки
dist.init(); //Инициализируем устройство
Serial.begin(serial_baudrate);
delay(200);
}
void loop() { dist.write(start_echo, 1);
//Записываем в регистр измерения 1, чтобы датчик измерил расстояние
dist.read(result_0, mas);
//Считвыаем данные с регистра и записываем в переменную mas
sum = mas[1] != 0 ? sum = (mas[0] * 256) + mas[1] - 4 : sum = (mas[0] * 256)
+ mas[1];
sum = mas[0] * 256 + mas[0]; Serial.println(«Dist: « + String(sum) + « cm»); delay(1000);
}
Опрос модуля «Преобразователь интерфейсов»
Значение ID модуля «Преобразователь интерфейсов» - 0xA1, что составляет в десятичной записи - 161.Для выбора режима работы необходимо в регистр 28 записать режим работы датчика: DAС - 0x20, PWM - 0x21, I2C - 0x22, SPI - 0x23, UART(Master) - 0x24, UART(Slave) - 0x25.
#include «DxlMaster2.h»
//Подключаем библиотеку для работы с Dynamixel устройствами
const unsigned long dynamixel_baudrate = 1000000;
//Выставляем скорость обмена данными с Dynamixel устройствами
const unsigned long serial_baudrate = 57600;
//Выставляем скорость сериал порта
const uint8_t id = 161; //ID Датчика
const uint8_t FREQ_MSB = 34;
const uint8_t FREQ_LSB = 35;
const uint8_t MODE_I2C = 34;
//Значение для выставления режима работы в I2C
const uint8_t SELECT_MODE = 28; //Регистр выбора режима работы
const uint8_t I2C_ENABLE = 29; //Регистр включение режима работы
const uint8_t ADDR_BUF = 26; //Буфер для записи
DynamixelDevice xface(id); //Объявляем Dynamixel устройство
void setup() {
DxlMaster.begin(dynamixel_baudrate); //Начинаем работу библиотеки
xface.init(); //Инициализируем устройство
Serial.begin(serial_baudrate);
xface.write(FREQ_MSB, 96);
xface.write(FREQ_LSB, 10);
xface.write(SELECT_MODE, MODE_I2C); //Выставляем режим работы в I2C
}
void loop() {
xface.write(ADDR_BUF, «test»); //Записываем в буфер данные
delay(200);
xface.write(I2C_ENABLE, 2); //Отправляем данные по шине
delay(300);
}
Опрос модуля «Джойстик»
Значение ID модуля «Джойстик» - 0x27, что составляет в десятичной записи - 39. Данные о смещение по оси X приходят в регистры 26 и 27, о смещении по оси Y в регистры 28 и 29, а информация о нажатии кнопки приходит в регистр 31.
#include «DxlMaster.h»
//Подключаем библиотеку для работы с Dynamixel устройствами
//Регистры сдвига джойстика
#define POTX_0_DATA 26
#define POTX_1_DATA 27
#define POTY_0_DATA 28
#define POTY_1_DATA 29
#define BUT_DATA 31
//Регистр нажатия джойстика
const unsigned long dynamixel_baudrate = 57600;
//Выставляем скорость обмена данными с Dynamixel устройствами
const unsigned long serial_baudrate = 57600;
//Выставляем скорость сериал порта
const uint8_t id = 39; //ID Датчика
DynamixelDevice joy(id); //Объявляем Dynamixel устройство
void setup() {
DxlMaster.begin(dynamixel_baudrate); //Начинаем работу библиотеки
joy.init(); //Инициализируем устройство
Serial.begin(serial_baudrate);
}
void loop() { uint8_t byte;
joy.read(BUT_DATA, byte); //Считвыаем нажатие
Serial.print(«BUT:»);
Serial.println(byte);
uint8_t byte0, byte1;
//Считываем смещение джойстика (центр 512)
joy.read(POTX_0_DATA, byte0);
joy.read(POTX_1_DATA, byte1);
Serial.print(«X:» + String((byte1 << 8) + byte0) + «\n»);
joy.read(POTY_0_DATA, byte0); joy.read(POTY_1_DATA, byte1);
Serial.print(«Y:» + String((byte1 << 8) + byte0) + «\n»);
delay(50);
}
Управление модулем «Светодиод»
Значение ID модуля «Светодиод» - 0х09, что составляет в десятичной записи - 9. Запись происходит в 26 регистр памяти, величина записываемого значения влияет на яркость светодиода. В программе реализовано 3 уровня яркости, которые сменяют друг друга с задержкой в 1 секунду. Управление реализовано с помощью метода DynamixelStatus write.
#include “DxlMaster.h”
const unsigned long dynamixel_baudrate = 57600;
const unsigned long serial_baudrate = 57600;
const uint8_t id = 9;
uint8_t a;
uint8_t b;
DynamixelDevice light(id);
void setup() {
DxlMaster.begin(dynamixel_baudrate);
light.init();
Serial.begin(serial_baudrate);
}
void loop() {
light.write(26, 0);
delay(1000);
light.write(26, 50);
delay(1000);
light.write(26, 255);
delay(1000);
}
Управление модулем «Звуковой пьезоизлучатель»
Значение ID модуля «Звуковой пьезоизлучатель» - 0х18, что составляет в десятичной записи - 24. Регистры памяти 26 и 27 содержат данные о воспроизводимой частоте. Данные из 28 регистра содержат информацию о скважности сигнала (пьезоизлучатель управляется по принципу ШИМ).
#include “DxlMaster.h”
const unsigned long dynamixel_baudrate = 57600;
const unsigned long serial_baudrate = 57600;
const uint8_t id = 24;
uint8_t a;
DynamixelDevice buz(id);
void setup() {
DxlMaster.begin(dynamixel_baudrate);
buz.init();
Serial.begin(serial_baudrate);
}
void loop() {
buz.write(28, 127);
buz.write(26, (uint16_t) 512);
delay(2000);
buz.write(26, (uint16_t) 256);
delay(2000);
buz.write(26, (uint16_t) 1024);
delay(2000);
}
Управление модулем «Силовой ключ»
Значение ID модуля «Силовой ключ» - 0х11, что составляет в десятичной записи - 17. Регистр памяти 28 содержит информацию о скважности сигнала (ток, подаваемый на присоединенную нагрузку, управляется по принципу ШИМ).
#include “DxlMaster.h”
const unsigned long dynamixel_baudrate = 57600;
const unsigned long serial_baudrate = 57600;
const uint8_t id = 17;
uint8_t a;
DynamixelDevice mos(id);
void setup() {
DxlMaster.begin(dynamixel_baudrate);
mos.init();
Serial.begin(serial_baudrate);
}
void loop() {
a = 0;
mos.write(28, a); // подача сигнала на открытие, при значении «0» - закрыт (ШИМ 0%)
delay(1000); // при значении «255» - открыт (ШИМ 100%) a = 127;
mos.write(28, a);
delay(1000);
a = 255;
mos.write(28, a);
delay(1000);
}
Таким образом, можно взаимодействовать с остальными модулями, подключенными по Dynamixel интерфейсу к Arduino-подобным контроллерам, производства ООО «Прикладная робототехника».
Подключение к контроллерам STEM Board и OpenCR-AR
Помимо Arduino-подобных контроллеров у ООО «Прикладная робототехника» существуют программируемые контроллеры, базирующиеся на микроконтроллерах STM и поддерживающие программирование через Arduino IDE, при условии установки дополнительного пакета поддержки плат. Примером таких контроллеров являются STEM Board и OpenCR-AR. Универсальный контроллер STEM Board представляет собой периферийную плату расширения, в которую физически устанавливаются программируемый контроллер OpenCM, производимый компанией ROBOTIS, и одноплатный микрокомпьютер NanoPi-AR. В свою очередь, контроллер OpenCR является более «продвинутой» версией контроллера STEM Board, за счет встроенного в плату значительно более мощного микроконтроллера, а также большого количества размещенной на плате периферии. Контроллер OpenCR-AR так же поддерживает интеграцию встраиваемого микрокомпьютера NanoPi-AR.
Для возможности программировать данные контроллеры с помощью Arduino IDE необходимо стандартными средствами среды разработки установить дополнительные пакеты поддержки данных плат. Для этого необходимо добавить в «Файл» -> «Настройки» -> «Дополнительные ссылки для менеджера плат» следующие ссылки:
https://raw.githubusercontent.com/ROBOTIS-GIT/OpenCM9.04/master/arduino/opencm_release/package_opencm9.04_index.json
https://raw.githubusercontent.com/ROBOTIS-GIT/OpenCR/master/arduino/opencr_release/package_opencr_index.json
После добавления вышеуказанных ссылок, в меню «Инструменты» -> «Плата» -> «Менеджер плат» необходимо выполнить поиск и установить предлагаемые пакеты для плат OpenCM и OpenCR (см. Рис. 2.31).
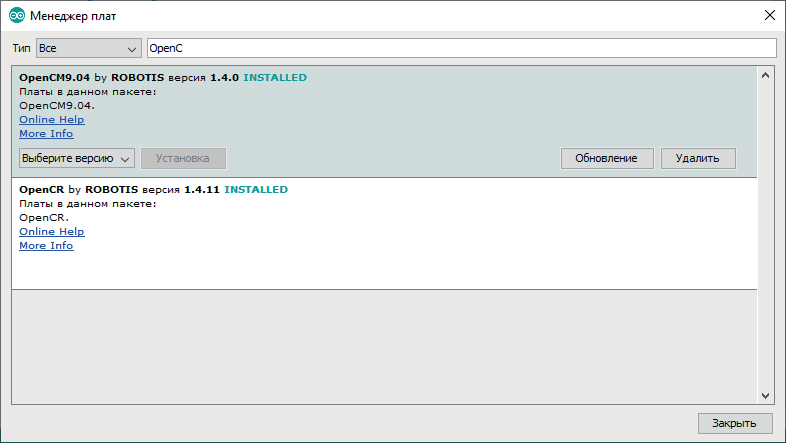 Рис. 2.31. Установка пакетов поддержки плат OpenCR и OpenCM
Рис. 2.31. Установка пакетов поддержки плат OpenCR и OpenCM
После установки данных пакетов в списке доступных для программирования плат появятся платы OpenCM и OpenCR (см. Рис. 2.31 2.32) Оба этих контроллера имеют аппаратную поддержку Dynamixel интерфейса (аналогично рассмотренным ранее
Arduino-подобным платам), в связи с чем для подключения Dynamixel-совместимых устройств требуется только подать питание 12В на плату через штатный разъем.
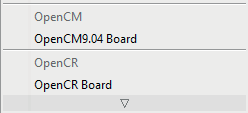 Рис. 2.32. Доступные к выбору платы OpenCR и OpenCM
Рис. 2.32. Доступные к выбору платы OpenCR и OpenCM
https://emanual.robotis.com/docs/en/software/dynamixel/dynamixel__sdk/overview/
Управление модулем «Светодиод»
Рассмотрим процесс управления модулем «Светодиод». Значение ID модуля «Светодиод» 0х09, что составляет в десятичной записи 9. Запись происходит в 26 регистр памяти, величина записываемого значения влияет на яркость светодиода. В программе реализовано мигание светодиода с интервалом в 2 секунды. Подключение модуля необходимо выполнять к центральному 3х пиновому порту.
#include <DynamixelSDK.h>
// указываем версию протокола (для всех модулей - 1.0)
#define PROTOCOL_VERSION 1.0
// базовые настройки
#define DXL_ID 9
#define BAUDRATE 57600
#define DEVICENAME “3”
// создаем экземпляр объекта обработчика порта
dynamixel::PortHandler *portHandler;
// создаем экземпляр объекта обработчика пакета
dynamixel::PacketHandler *packetHandler;
void setup() {
// инициализируем обработчик порта
portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME);
// инициализируем обработчик пакета
packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOC OL_VERSION);
// открываем порт
portHandler->openPort();
// устанавливаем скорость соединения
portHandler->setBaudRate(BAUDRATE);
}
void loop() {
// включаем светодиод
packetHandler->write1ByteTxRx(portHandler, DXL_ID, 26, 200); delay(2000);
// выключаем светодиод
packetHandler->write1ByteTxRx(portHandler, DXL_ID, 26, 0); delay(2000);
}
Опрос модуля «Концевой выключатель»
Рассмотрим процесс опроса модуля «Концевой выключатель». Значение ID модуля «Концевой выключатель» - 0х17, что составляет в десятичной записи - 23. Чтение происходит из 27 регистра памяти. В программе реализован вывод состояния микропереключателя в монитор порта. Подключение модуля необходимо выполнять к центральному 3х пиновому порту.
#include <DynamixelSDK.h>
// указываем версию протокола (для всех модулей - 1.0)
#define PROTOCOL_VERSION 1.0
// базовые настройки
#define DXL_ID 23
#define BAUDRATE 57600
#define DEVICENAME “3”
// создаем экземпляр объекта обработчика порта
dynamixel::PortHandler *portHandler;
// создаем экземпляр объекта обработчика пакета
dynamixel::PacketHandler *packetHandler;
// создаем и инициализируем переменную для хранения состояния
uint8_t data = 0;
void setup() {
// инициализируем вывод в последовательный порт
Serial.begin(115200);
// ждем, пока не открылся монитор порта
while(!Serial);
//инициализируем обработчик порта
portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME);
// инициализируем обработчик пакета
packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOC OL_VERSION);
// открываем порт
portHandler->openPort();
// устанавливаем скорость соединения
portHandler->setBaudRate(BAUDRATE);
}
void loop() {
// выполняем чтение регистра 27
packetHandler->read1ByteTxRx(portHandler, DXL_ID, 27, (uint8_t*)&data); Serial.println(data);
delay(50);
}
Опрос модуля «Потенциометр»
Рассмотрим процесс опроса модуля «Потенциометр». Значение ID модуля «Потенциометр» - 0х13, что составляет в десятичной записи - 19. Чтение происходит из 26 регистра памяти. В программе реализован вывод положения потенциометра в монитор порта. Подключение модуля необходимо выполнять к центральному 3х пиновому порту. Отличием от предыдущего примера является то, что результатом чтения является двухбайтовое число.
#include <DynamixelSDK.h>
// указываем версию протокола (для всех модулей - 1.0)
#define PROTOCOL_VERSION 1.0
// базовые настройки
#define DXL_ID 19
#define BAUDRATE 57600
#define DEVICENAME “3”
// создаем экземпляр объекта обработчика порта
dynamixel::PortHandler *portHandler;
// создаем экземпляр объекта обработчика пакета
dynamixel::PacketHandler *packetHandler;
// создаем и инициализируем переменную для хранения значения
uint16_t data = 0;
void setup() {
// инициализируем вывод в последовательный порт
Serial.begin(115200);
// ждем, пока не открылся монитор порта
while(!Serial);
// инициализируем обработчик порта
portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME);
// инициализируем обработчик пакета
packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOC OL_VERSION);
// открываем порт
portHandler->openPort();
// устанавливаем скорость соединения
portHandler->setBaudRate(BAUDRATE);
}
void loop() {
// выполняем чтение с регистра 26 длиной 2 байта
packetHandler->read2ByteTxRx(portHandler, DXL_ID, 26, (uint16_t*)&data); Serial.println(data);
delay(50);
}
Управление модулем «Драйвер двигателя постоянного тока (2 канала)»
В качестве примера рассмотрим процесс управления двумя двигателями постоянного тока, подключенными к периферийному модулю
«Драйвер двигателя постоянного тока (2 канала)». Значение ID данного модуля – 0х06, что составляет в десятичной записи – 6. Схема подключения представлена (Рис. 2.33 и Рис 2.34). Обратите внимание – подключение модуля к контроллеру выполняется через средний разъем. Т.к. именно он управляется встроенным контроллером OpenCM.
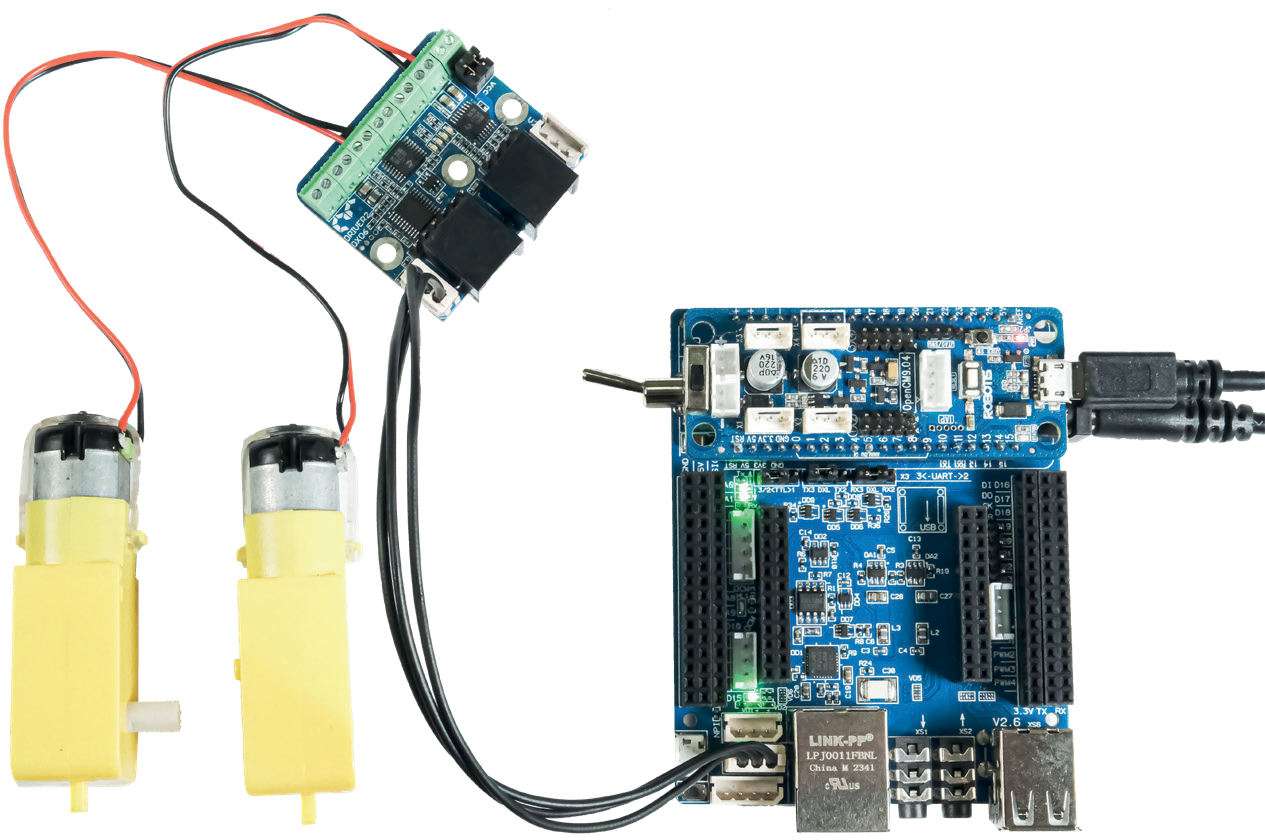 Рис. 2.33. Внешний вид подключения двигателей постоянного тока к модулю «Драйвер двигателя постоянного тока (2 канала)» и контроллеру STEM Board
Рис. 2.33. Внешний вид подключения двигателей постоянного тока к модулю «Драйвер двигателя постоянного тока (2 канала)» и контроллеру STEM Board
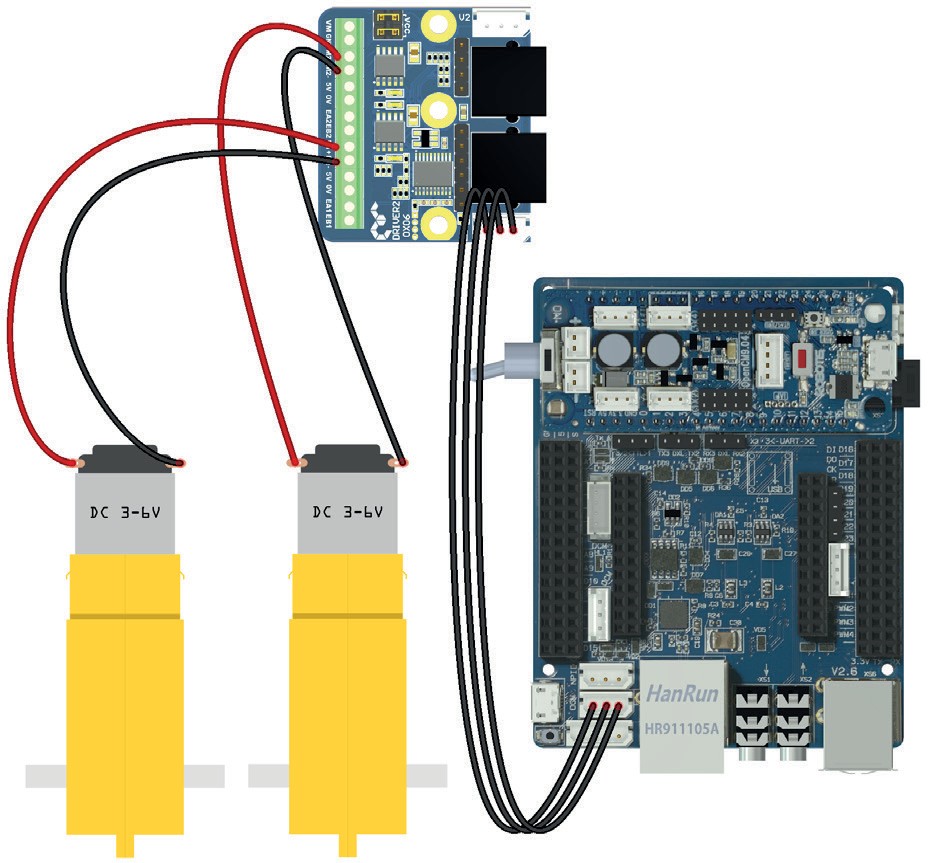 Рис. 2.34. Схема подключения двигателей постоянного тока к модулю «Драйвер двигателя постоянного тока (2 канала)» и контроллеру STEM Board
Рис. 2.34. Схема подключения двигателей постоянного тока к модулю «Драйвер двигателя постоянного тока (2 канала)» и контроллеру STEM Board
#include <DynamixelSDK.h>
// указываем версию протокола (для всех модулей - 1.0)
#define PROTOCOL_VERSION 1.0
// базовые настройки
#define DXL_ID 6
#define BAUDRATE 57600
#define DEVICENAME “3”
// создаем экземпляр объекта обработчика порта
dynamixel::PortHandler *portHandler;
// создаем экземпляр объекта обработчика пакета
dynamixel::PacketHandler *packetHandler;
// создаем и инициализируем переменную для хранения значения
uint16_t data = 0;
void setup() {
// инициализируем обработчик порта
portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME);
// инициализируем обработчик пакета
packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOC OL_VERSION);
// открываем порт
portHandler->openPort();
// устанавливаем скорость соединения
portHandler->setBaudRate(BAUDRATE);
}
void loop() {
// выполняем запуск первого и второго мотора на 50% мощности
packetHandler->write2ByteTxRx(portHandler, DXL_ID, 28, 512);
packetHandler->write2ByteTxRx(portHandler, DXL_ID, 30, 512);
delay(2000);
// меняем направление
packetHandler->write2ByteTxRx(portHandler, DXL_ID, 28, -512);
packetHandler->write2ByteTxRx(portHandler, DXL_ID, 30, -512);
delay(2000);
}
Управление модулем «Трехцветный светодиод»
В качестве примера использования контроллера OpenCR-AR рассмотрим управление периферийным модулем «Трехцветный светодиод». Поскольку архитектуры программируемых контроллеров STEM Board и OpenCR-AR подобны, то управляющий код для обоих плат выглядит идентично, за исключением начальных настроек – для OpenCR-AR параметр DEVICENAME должен быть равен «1». В случае использования контроллера OpenCR-AR периферийные модули подключаются в ближний к USB разъем (см. Рис. 2.35).
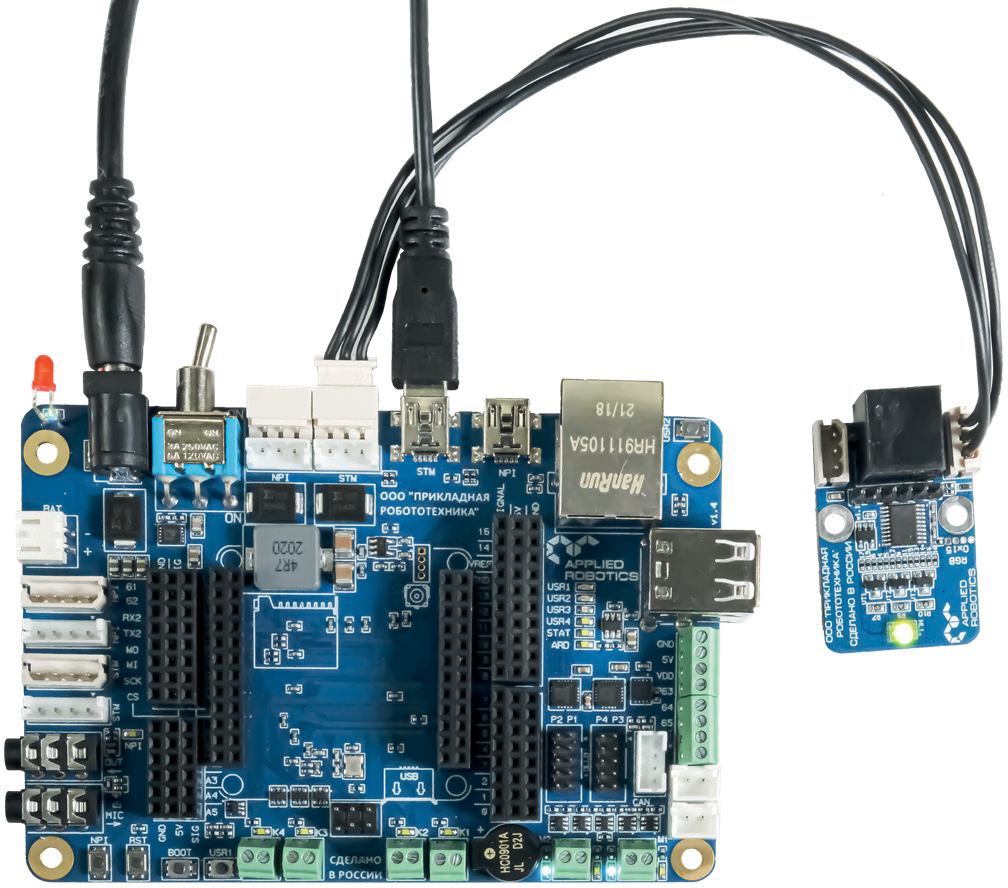 Рис. 2.35. Контроллер OpenCR-AR с подключенным к нему модулем
Рис. 2.35. Контроллер OpenCR-AR с подключенным к нему модулем
«Трехцветный светодиод»
Управляющий код, включающий последовательно все три RGB составляющих светодиода, а затем выключающий их, выглядит следующим образом:
#include <DynamixelSDK.h>
// указываем версию протокола (для всех модулей - 1.0)
#define PROTOCOL_VERSION 1.0
// базовые настройки
#define DXL_ID 21
#define BAUDRATE 57600
#define DEVICENAME “1”
// создаем экземпляр объекта обработчика порта
dynamixel::PortHandler *portHandler;
// создаем экземпляр объекта обработчика пакета
dynamixel::PacketHandler *packetHandler;
// создаем и инициализируем переменную для хранения значения
uint16_t data = 0;
void setup() {
// инициализируем обработчик порта
portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME);
// инициализируем обработчик пакета
packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOC OL_VERSION);
// открываем порт
portHandler->openPort();
// устанавливаем скорость соединения
portHandler->setBaudRate(BAUDRATE);
}
void loop() {
// выполняем включение всех RGB составляющих последовательно
packetHandler->write1ByteTxRx(portHandler, DXL_ID, 26, 200);
delay(2000);
packetHandler->write1ByteTxRx(portHandler, DXL_ID, 27, 200);
delay(2000);
packetHandler->write1ByteTxRx(portHandler, DXL_ID, 28, 200);
delay(2000);
// выключаем все составляющие
packetHandler->write1ByteTxRx(portHandler, DXL_ID, 26, 0);
packetHandler->write1ByteTxRx(portHandler, DXL_ID, 27, 0);
packetHandler->write1ByteTxRx(portHandler, DXL_ID, 28, 0);
delay(2000);
}
Управление модулем «Ультразвуковой дальномер»
В качестве примера рассмотрим процесс измерения расстояния при помощи модуля «Ультразвуковой дальномер». Значения расстояния будут выводиться на экране. Значение ID данного модуля – 0х02, что составляет в десятичной записи – 42. Схема подключения представлена на рисунке Рис. 2.36. Обратите внимание, в какой разъем осуществляется подключение модуля к контроллеру. Т.к. именно он управляется встроенным контроллером OpenCM.
После загрузки требуется открыть «Монитор порта» во вкладке «Инструменты»
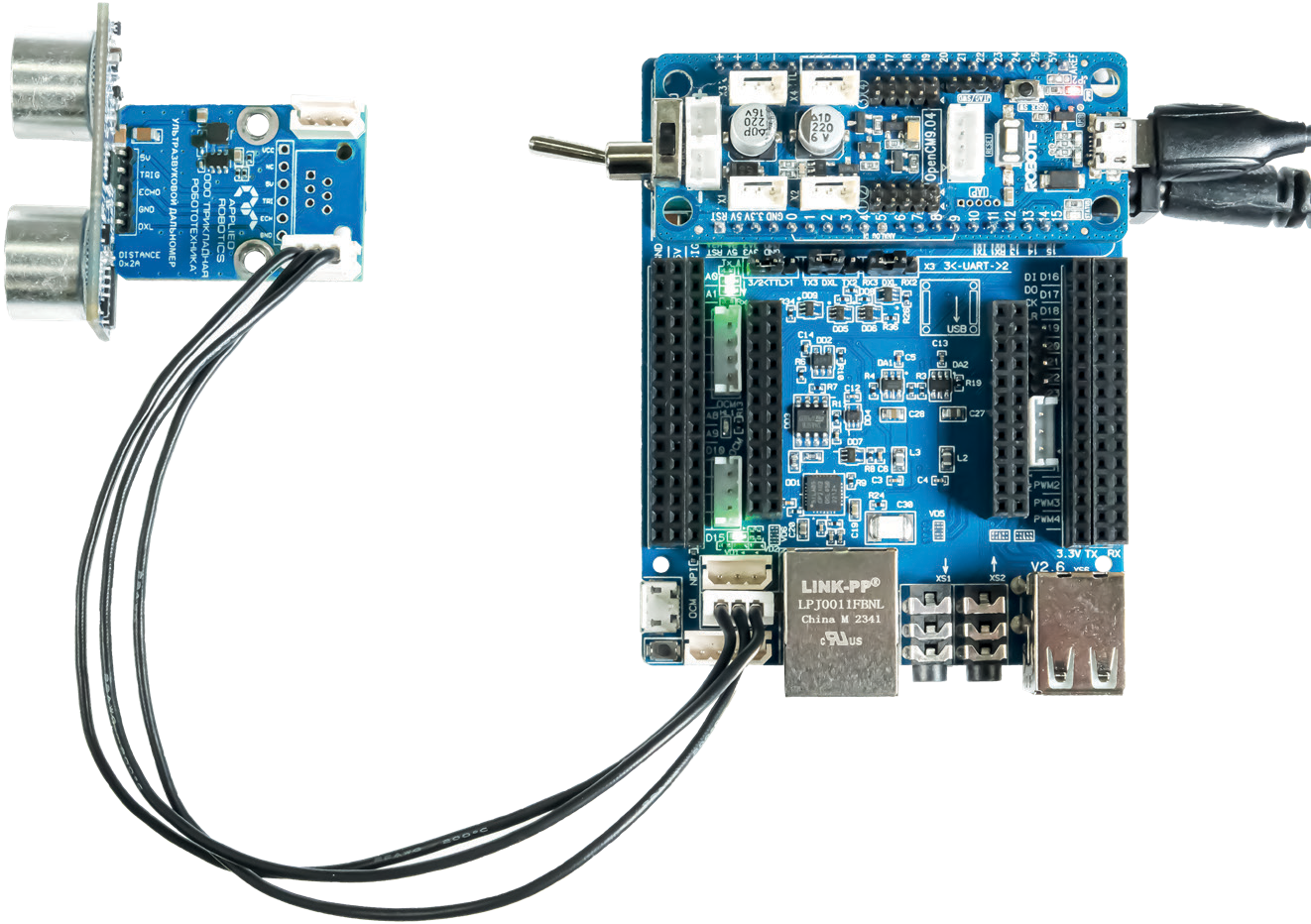 Рис. 2.36. Подключение модуля «Ультразвуковой дальномер»
Рис. 2.36. Подключение модуля «Ультразвуковой дальномер»
#include «DynamixelSDK.h»
//Базовые настройки
#define PROTOCOL_VERSION 1.0
#define DXL_ID 42
#define BAUDRATE 57600
#define DEVICENAME «3»
//Создаем экземпляр объекта обработчика порта
dynamixel::PortHandler *portHandler;
//Создаем экземпляр объекта обработчика пакета
dynamixel::PacketHandler *packetHandler;
uint8_t data = 0;
void setup() {
//Инциализируем вывод в последовательный порт
Serial.begin(115200);
//Инициализируем обработчик порта
portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME);
//Иницализируем обработчика пакета
packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOC OL_VERSION);
//Открываем порт
portHandler->openPort();
//Устанавливаем скорость соединения
portHandler->setBaudRate(BAUDRATE);
}
void loop() {
//Запись значения 1 в регистр 25 для начала измерения данных
packetHandler->write1ByteTxRx(portHandler, DXL_ID, 25, 1);
//Выполняем чтение с регистра 26 длиной 2 байта
packetHandler->read1ByteTxRx(portHandler, DXL_ID, 27, (uint8_t*)&data); Serial.println(«Дальность: « + String(data));
delay(200);
}
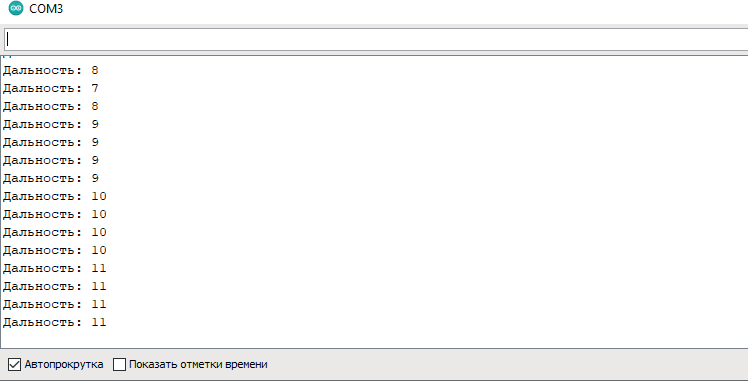 ### Управление модулем «Датчик освещенности»
### Управление модулем «Датчик освещенности»
Рассмотрим процесс управления светодиодом с помощью модуля «Датчик освещенности». Для реализации подключаем модуль «Светодиод» к модулю «Датчика освещенности», последний подключаем к управляющей плате. В программе выставлено значение освящения. После запуска программы, при затемнении датчика освещенности, горящий модуль светодиода, увеличивает яркость.
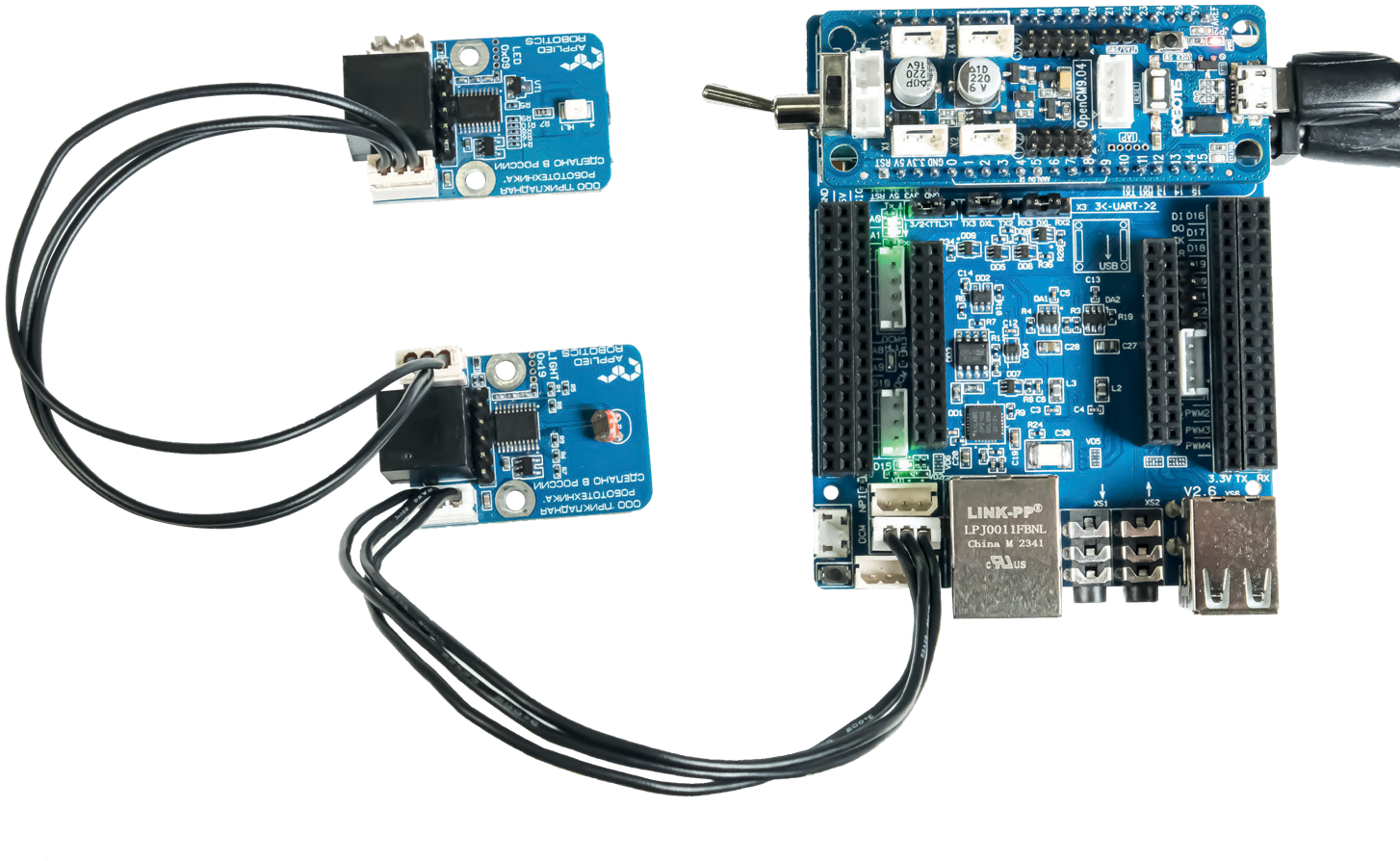 Рис. 2.37. Подключение модулей «Датчик освещенности» и «Светодиод»
Рис. 2.37. Подключение модулей «Датчик освещенности» и «Светодиод»
#include «DynamixelSDK.h»
//Базовые настройки
#define PROTOCOL_VERSION 1.0
#define DXL_LIGHT 25
#define DXL_LED 9
#define BAUDRATE 57600
#define DEVICENAME «3»
//Создаем экземпляр объекта обработчика порта
dynamixel::PortHandler *portHandler;
//Создаем экземпляр объекта обработчика пакета
dynamixel::PacketHandler *packetHandler;
uint16_t data = 0; void setup() {
//Инциализируем вывод в последовательный порт
Serial.begin(115200);
//Инициализируем обработчик порта
portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME);
//Иницализируем обработчика пакета
packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOC OL_VERSION);
//Открываем порт
portHandler->openPort();
//Устанавливаем скорость соединения
portHandler->setBaudRate(BAUDRATE);
}
void loop() {
//Выполняем чтение с регистра 26 длиной 2 байта
packetHandler->read2ByteTxRx(portHandler, DXL_LIGHT, 26, (uint16_t*)&data);
//Проверяем значение освещенности
if(data < 330){
//Записываем в 26 регистр яркость LED датчика (0 - 255)
packetHandler->write1ByteTxRx(portHandler, DXL_LED, 26, 180);
}
else{
packetHandler->write1ByteTxRx(portHandler, DXL_LED, 26, 80);
}
Serial.println(«Уровень освещенности: « + String(data));
delay(200);
}
Управление модулем «Датчик силы»
В качестве примера рассмотрим процесс измерения силы нажатия на модуль «Датчика силы». Значения будут выводиться на экране. Значение ID данного модуля – 0х20, что составляет в десятичной записи – 32. Схема подключения представлена на рисунке Рис. 2.38. Обратите внимание, в какой разъем осуществляется подключение модуля к контроллеру. Т.к. именно он управляется встроенным контроллером OpenCM.
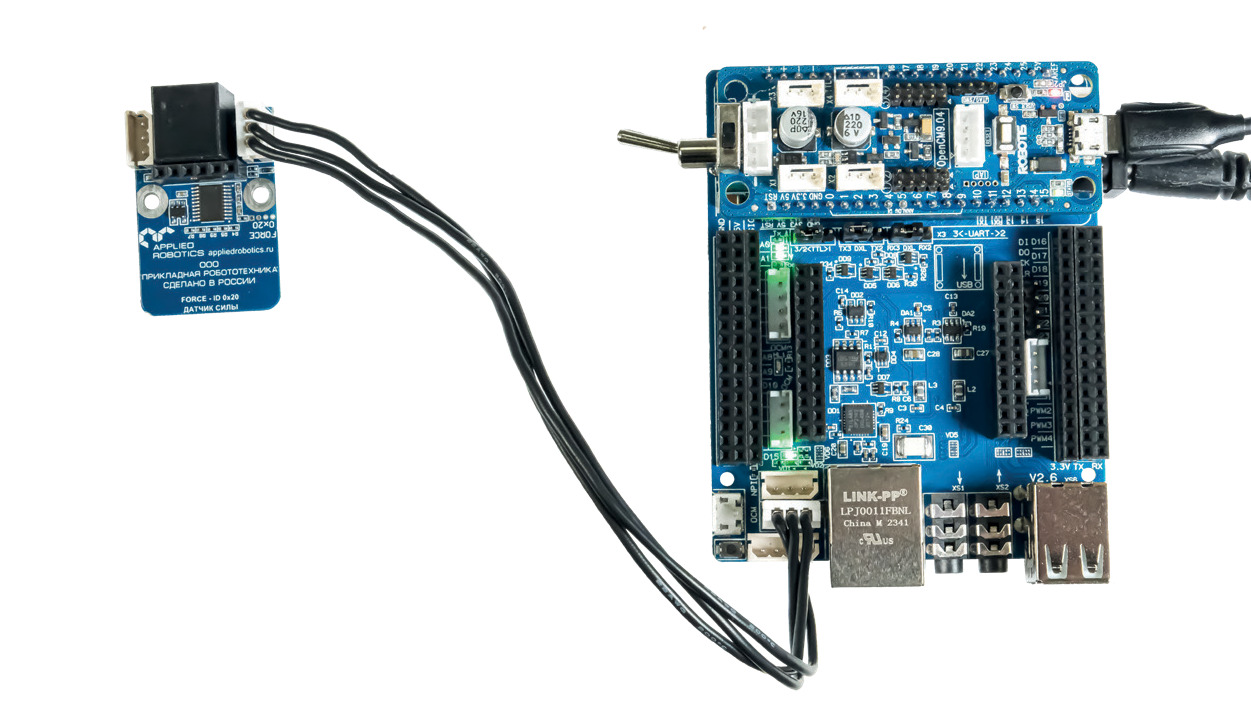 Рис. 2.38. Подключение модуля «Датчик силы»
Рис. 2.38. Подключение модуля «Датчик силы»
После загрузки требуется открыть «Монитор порта» во вкладке «Инструменты».
#include «DynamixelSDK.h»
//Базовые настройки
#define PROTOCOL_VERSION 1.0
#define DXL_ID 32
#define BAUDRATE 57600
#define DEVICENAME «3»
//Создаем экземпляр объекта обработчика порта
dynamixel::PortHandler *portHandler;
//Создаем экземпляр объекта обработчика пакета
dynamixel::PacketHandler *packetHandler;
uint16_t data = 0; void setup() {
//Инциализируем вывод в последовательный порт
Serial.begin(115200);
//Инициализируем обработчик порта
portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME);
//Иницализируем обработчика пакета
packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOC OL_VERSION);
//Открываем порт
portHandler->openPort();
//Устанавливаем скорость соединения
portHandler->setBaudRate(BAUDRATE);
}
void loop() {
//Выполняем чтение с регистра 26 длиной 2 байта
packetHandler->read2ByteTxRx(portHandler, DXL_ID, 26, (uint16_t*)&data); Serial.println(«Сила нажатия: « + String(data));
delay(200);
}
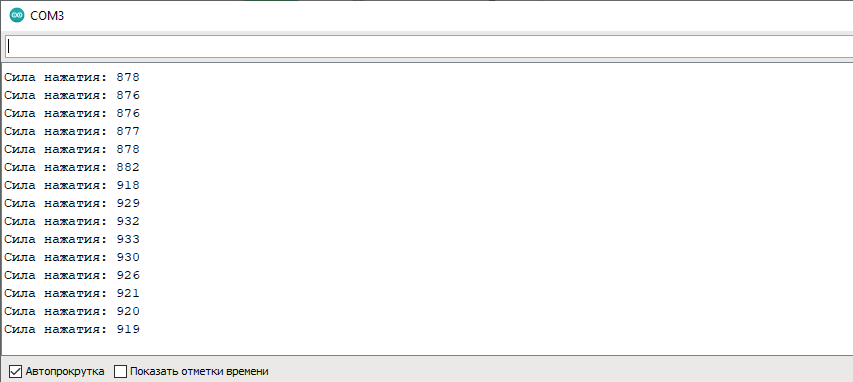 ## Подключение к контроллеру CM-530
## Подключение к контроллеру CM-530
Программируемый контроллер CM-530, производимый компанией ROBOTIS, входит в состав большого количества робототехнических конструкторов, таких как: ROBOTIS STEM, ROBOTIS PREMIUM, «СТЕМ Лаборатория», «СТЕМ Академия». Программирование данного контроллера выполняется с помощью блочно-графической среды R+Task 3.0. Поскольку данный контроллер, по умолчанию, рассчитан на взаимодействие с Dynamixel-совместимыми устройствами, рассмотрим процесс управления и опроса некоторых простейших периферийных модулей. Остальные модули будут опрашиваться и управляться аналогично. Важно! Контроллер CM-530 умеет обмениваться данными только на скорости 1000000, в связи с чем, перед использованием периферийных модулей совместно с ним, необходимо изменить им настройки скорости.
Управление модулем «Трехцветный светодиод»
Подключение периферийного модуля «Трехцветный светодиод» к программируемому контроллеру СМ-530 выглядит следующим образом (см. Рис. 2.39):
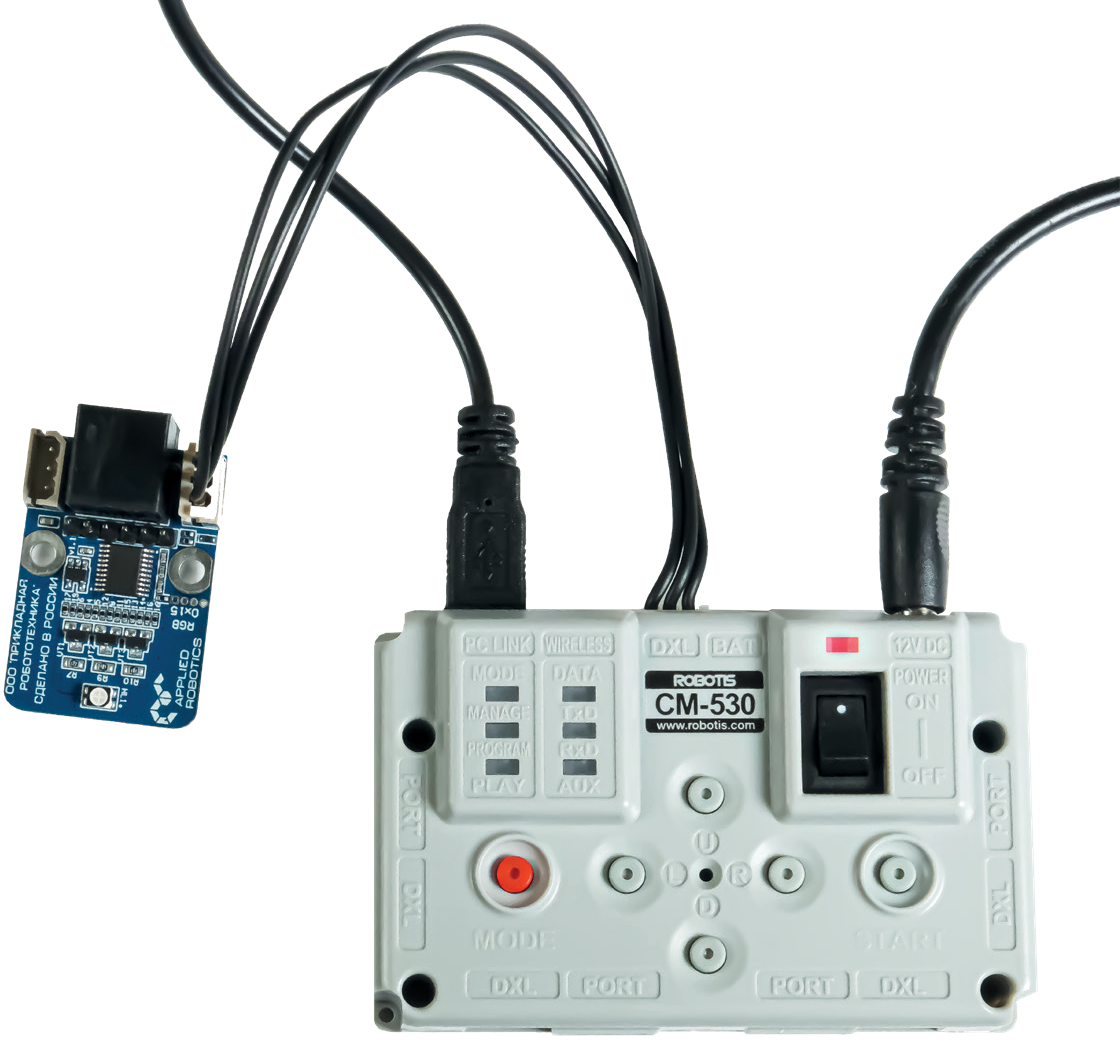 Рис. 2.39. Подключение модуля «Трехцветный светодиод» к контроллеру CM-530
Рис. 2.39. Подключение модуля «Трехцветный светодиод» к контроллеру CM-530
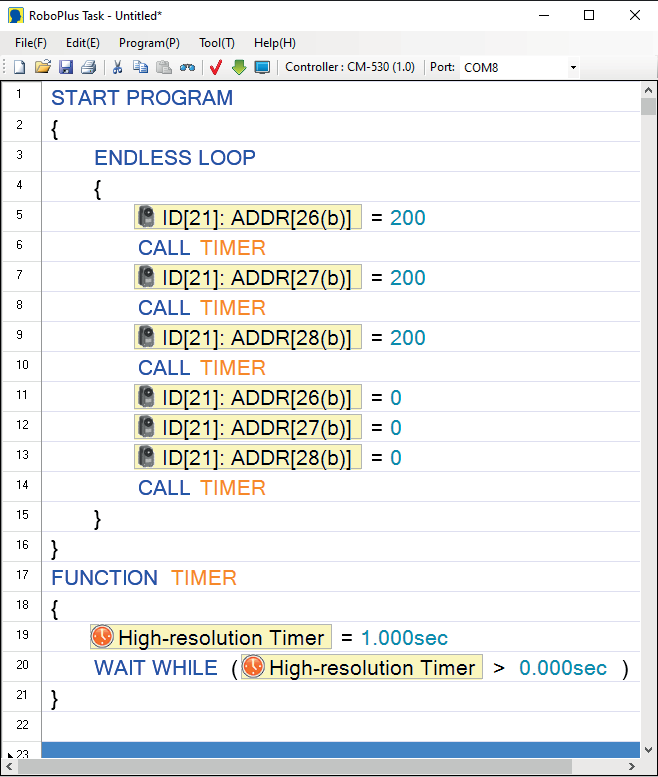 Рис. 2.40. Код управления модулем «Трехцветный светодиод» при помощи контроллера СМ-530 в среде разработки R+ Task
Рис. 2.40. Код управления модулем «Трехцветный светодиод» при помощи контроллера СМ-530 в среде разработки R+ Task
Опрос модуля «Потенциометр»
В качестве примера периферийного модуля, с которого можно получать данные на контроллер CM-530, рассмотрим модуль «Потенциометр». Для получения данных с модуля, код будет выглядеть следующим образом (см. Рис. 2.41):
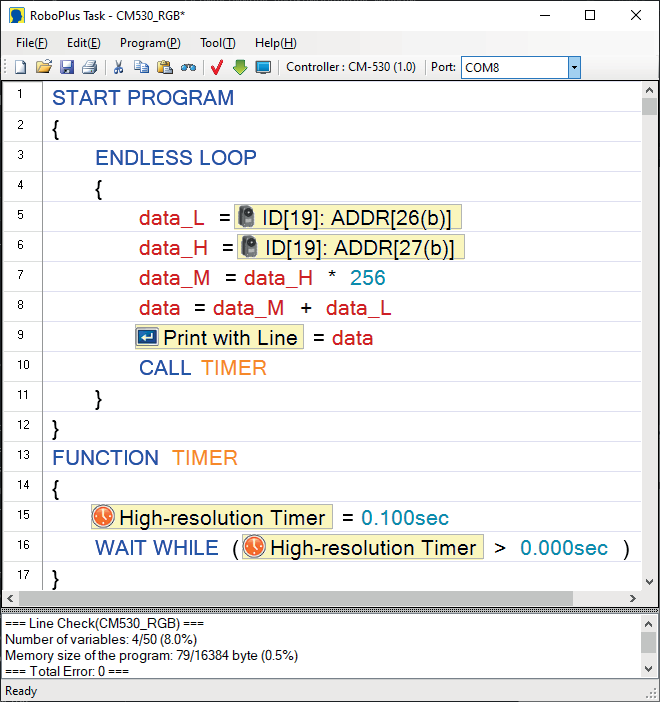 Рис. 2.41. Код управления модулем «Потенциометр» при помощи контроллера СМ-530 в среде разработки R+ Task
Рис. 2.41. Код управления модулем «Потенциометр» при помощи контроллера СМ-530 в среде разработки R+ Task
Основным отличием данного примера является то, что результат опроса – двухбайтовое число, в связи с чем приходится читать подряд два регистра, а затем склеивать их в одно значение. В итоге, в монитор порта будет выводиться результат каждую 0.1 секунды.
Подключение к микрокомпьютеру с Linux и ROS через микроконтроллер
Для взаимодействия с функциональными периферийными модулями из-под операционной системы ROS (Robot Operating System) можно использовать промежуточный микроконтроллер. В качестве примера рассмотрим взаимодействие с периферийными модулями, используя микроконтроллер NanoPi-AR, интегрированный в контроллер OpenCR- AR (см. Рис. 2.42), и на котором установлены операционные системы Linux и ROS. Аналогичный подход можно применять и в случае использования периферийной платы STEM Board, с интегрированными в него микроконтроллером NanoPi-AR и контроллером OpenCM (см. Рис. 2.43).
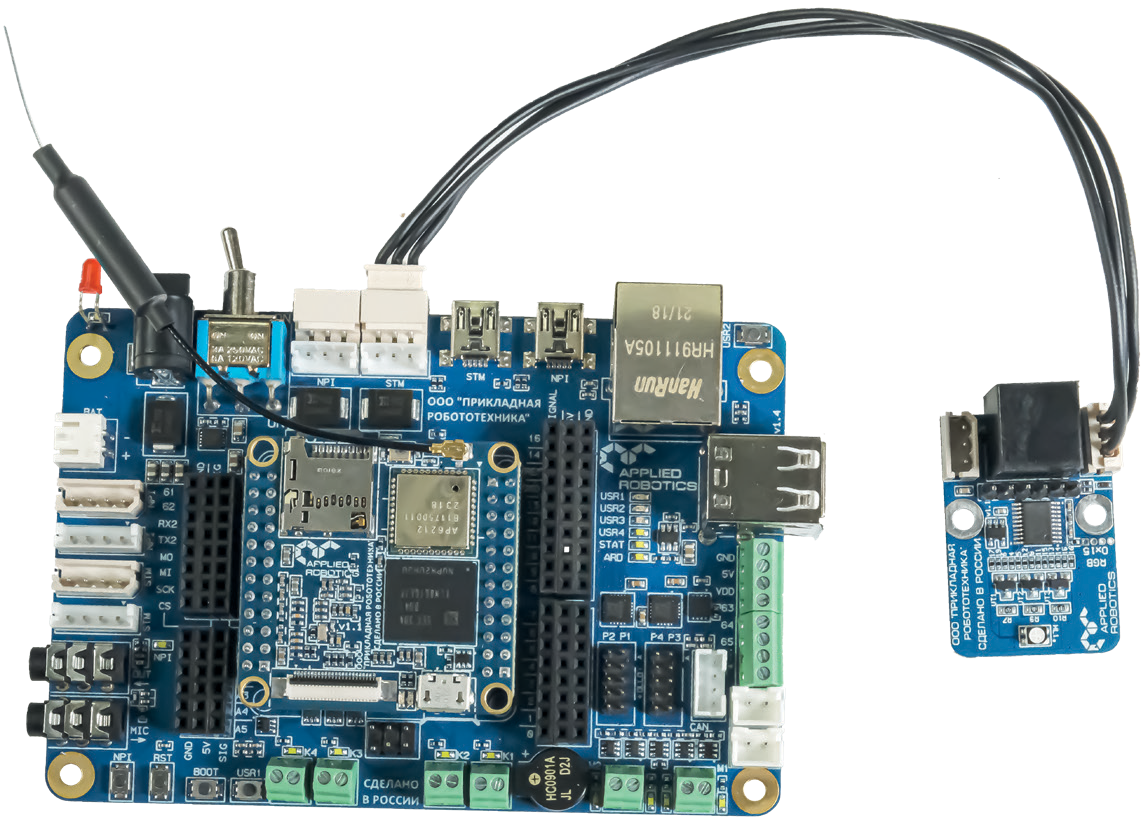 Рис. 2.42. Подключение периферийного модуля к контроллеру OpenCR-CR с интегрированным в него контроллером NanoPi-AR
Рис. 2.42. Подключение периферийного модуля к контроллеру OpenCR-CR с интегрированным в него контроллером NanoPi-AR
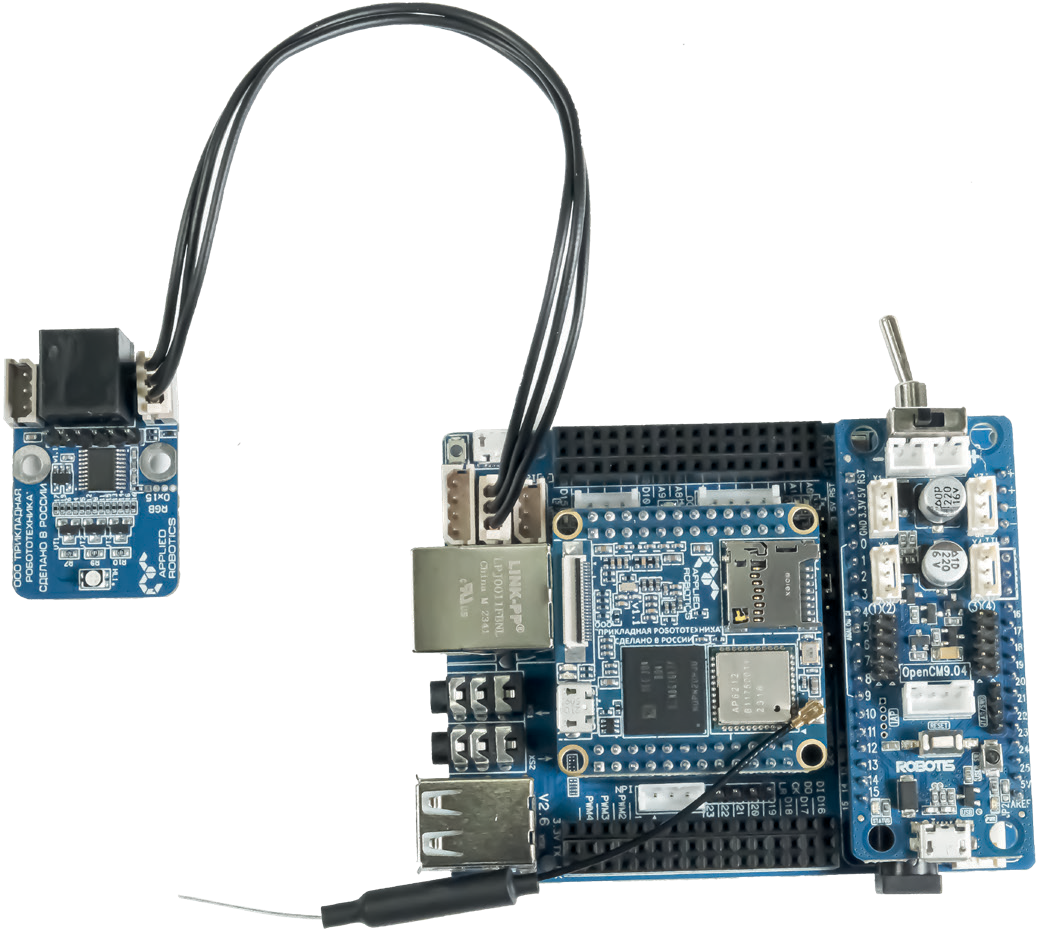 Рис. 2.43. Подключение периферийного модуля к универсальному контроллеру STEM Board (периферийная плата STEM Board с интегрированными в нее микроконтроллером NanoPi-AR и контроллером OpenCM)
Рис. 2.43. Подключение периферийного модуля к универсальному контроллеру STEM Board (периферийная плата STEM Board с интегрированными в нее микроконтроллером NanoPi-AR и контроллером OpenCM)
Рассмотрим взаимодействия с периферийными модулями посредством контроллера под управлением на операционной системе ROS на двух следующих примерах – разберем способ опроса модуля «Концевой выключатель» и управление модулем «Светодиод». Подключение модулей к контроллерам в примерах выполняется так, как было показано на рисунках выше. Также для корректной работы необходимо подключить к контроллерам внешнее питание 12В.
Опрос модуля «Концевой выключатель»
Первым делом, необходимо загрузить управляющую программу в микроконтроллер. Полный код программы будет приведен в данном разделе далее. Сейчас давайте разберем основные части данной программы. У каждого Dynamixel-совместимого устройства есть свой ID. Стандартный DXL_ID (значение ID Dynamixel-совместимого устройства) для модуля «Концевой выключатель» составляет 23. Объявление значения ID
устройства происходит в строчке:
#define DXL_ID 23
Связь платы с микрокомпьютером NanoPI-AR осуществляется с помощью последовательного порта (Serial) на аппаратном уровне. Поэтому необходимо инициировать последовательное соединение с помощью команды:
Serial2.begin(115200);
После успешного открытия порта и инициализации модуля «Концевой выключатель» возможно считать состояние микропереключателя с помощью следующей команды:
dxl_comm_result = packetHandler->read2ByteTxRx(portHandler, DXL_ID, 27, &dxl_present_position, &dxl_error);
Состояние микропереключателя хранится в 27 регистре. Считав из него информацию, можно переслать соответствующие команды на микроконтроллер:
if (dxl_present_position != 0)
{
Serial2.println(“push down”);
Serial.print(“push down”);
}
else { Serial2.println(“push up”);
}
В свою очередь, на стороне микрокомпьютера в рабочей папке требуется создать пакет и ноду-паблишер. Весь код ноды приведен далее. Кроме установленного и настроенного на микроконтроллере ROS, так же понадобится библиотека serial. Ниже разберем основные части управляющей программы.
Импортируем библиотеку serial:
import serial
Создадим паблишер и инициализируем ноду, более подробно с принципом работы ROS можно ознакомиться в соответствующих пособиях.
pub = rospy.Publisher(‘chatter’, String, queue_size=1) rospy.init_node(‘talker’, anonymous=True)
rate = rospy.Rate(100) # 10hz
Далее необходимо указать порт и скорость передачи данных:
port = serial.Serial(“/dev/ttyS1” , baudrate=115200, timeout=100)
После этого можно считать информацию с выбранного порта и отослать её в топик.
c = port.readline() print(c) pub.publish(c) rate.sleep()
Таким образом, микроконтроллер берет на себя все необходимые процессы по опросу модуля и передает уже готовые данные непосредственно программируемому контроллеру для дальнейшего применения.
Образец кода для контроллера OpenCR-AR:
#include <DynamixelSDK.h>
// Protocol version
#define PROTOCOL_VERSION 1.0 // See which protocol version is used in the Dynamixel
// Default setting
#define DXL_ID 23
#define BAUDRATE 57600
#define DEVICENAME “OpenCR_DXL_Port” // This definition only has a symbolic meaning and does not affect to any functionality
// Dynamixel moving status threshold
#define ESC_ASCII_VALUE 0x1b
#define CMD_SERIAL Serial
int getch()
{
while(1)
{
if( CMD_SERIAL.available() > 0 )
{
break;
}
}
return CMD_SERIAL.read();
}
int kbhit(void)
{
return CMD_SERIAL.available();
}
void setup()
{
Serial2.begin(115200);
Serial.begin(115200);
while(!Serial);
Serial.println(“Start..”);
// Initialize PortHandler instance
// Set the port path
// Get methods and members of PortHandlerLinux or
PortHandlerWindows dynamixel::PortHandler *portHandler =dynamixel::PortHandler::getPortH
andler(DEVICENAME);
// Initialize PacketHandler instance
// Set the protocol version
// Get methods and members of Protocol1PacketHandler or Protocol2PacketHandler
dynamixel::PacketHandler *packetHandler = dynamixel::PacketHandler::g etPacketHandler(PROTOCOL_VERSION);
int index = 0;
int dxl_comm_result = COMM_TX_FAIL; // Communication result uint8_t dxl_error = 0; // Dynamixel error
uint16_t dxl_present_position = 0; // Present position
// Open port
if (portHandler->openPort())
{
}
else
{
}
Serial.print(“Succeeded to open the port!\n”);
Serial.print(“Failed to open the port!\n”); return;
// Set port baudrate
if (portHandler->setBaudRate(BAUDRATE))
{
}
else
{
}
Serial.print(“Succeeded to change the baudrate!\n”);
Serial.print(“Failed to change the baudrate!\n”); return;
while(1)
{
dxl_comm_result = packetHandler->read2ByteTxRx(portHandler, DXL_ID, 27, &dxl_present_position, &dxl_error);
if (dxl_comm_result != COMM_SUCCESS)
{
Serial.print(packetHandler->getTxRxResult(dxl_comm_result));
}
else if (dxl_error != 0)
{
Serial.print(packetHandler->getRxPacketError(dxl_error));
}
if (dxl_present_position != 0)
{
Serial2.println(“push down”);
Serial.print(“push down”);
}
else { Serial2.println(“push up”);
}
Serial.println(“ “);
}
// Close port
portHandler->closePort();
}
void loop()
{
}
Образец кода ноды для микроконтроллера NanoPi-AR:
!/usr/bin/env python import rospy
import serial
from std_msgs.msg
import String def talker():
pub = rospy.Publisher(‘chatter’, String, queue_size=1)
rospy.init_node(‘talker’, anonymous=True)
rate = rospy.Rate(100) # 10hz
port = serial.Serial(“/dev/ttyS1” , baudrate=115200, timeout=100)
while not rospy.is_shutdown():
c = port.readline()
print(c)
pub.publish(c)
rate.sleep()
if name == ‘ main ’:
try:
talker()
Управление модулем «Светодиод»
В случае управления модулем «Светодиод», посредством контроллера под управлением на операционной системе ROS, код программы будет приблизительно такой же, как и в случае предыдущего примера, за исключением направления передачи данных.
На стороне контроллера OpenCR-AR:
Значение DXL_ID для модуля «Светодиод» составляет 9:
#define DXL_ID 9
Информацию о состоянии модуля «Светодиод» можно получить при помощи следующих команд:
if (Serial2.available() > 0)
{
//Serial.println(Serial2.read());
incomingByte = Serial2.read();
Serial.println(incomingByte, DEC);
if (incomingByte == 49)
{
dxl_comm_result = packetHandler->write1ByteTxRx(portHandler, DXL_ID, 26, 50, &dxl_error);
}
if (incomingByte == 50)
{
dxl_comm_result = packetHandler->write1ByteTxRx(portHandler, DXL_ID, 26, 0, &dxl_error);
}
}
dxl_comm_result = packetHandler->write1ByteTxRx(portHandler, DXL_ID, 26, 50, &dxl_error);
Запись происходит в 26 регистр, следующий аргумент команды отвечает за значение, которое мы запишем в регистр:
«0» - светодиод не горит;
«50» - светодиод горит.
На стороне микроконтроллера NanoPi-AR:
На стороне микроконтроллера NanoPi-AR необходимо создать ноду-подписчик, которая будет отправлять информацию в порт S1 в зависимости от информации, которую она получила из топика.
rospy.loginfo(data.data)
if data.data == “1”:
port.write(b’1’)
if data.data == “2”:
port.write(b’2’)
Образец кода для контроллера OpenCR-AR:
include
// Protocol version
define PROTOCOL_VERSION 1.0 // See which protocol version is used in the Dynamixel
// Default setting
#define DXL_ID 9 // Dynamixel ID: 1
#define BAUDRATE 57600
#define DEVICENAME “OpenCR_DXL_Port” // This definition only has a symbolic meaning and does not affect to any functionality
// Dynamixel moving status threshold
#define ESC_ASCII_VALUE 0x1b #define CMD_SERIAL Serial
int getch()
{
while(1)
{
if( CMD_SERIAL.available() > 0 )
{
break;
}
}
return CMD_SERIAL.read();
}
int kbhit(void)
{
return CMD_SERIAL.available();
}
void setup()
{
Serial2.begin(115200);
Serial.begin(115200);
while(!Serial);
Serial.println(“Start..”);
// Initialize PortHandler instance
// Set the port path
// Get methods and members of PortHandlerLinux or
PortHandlerWindows dynamixel::PortHandler *portHandler =dynamixel::PortHandler::getPortH
andler(DEVICENAME);
// Initialize PacketHandler instance
// Set the protocol version
// Get methods and members of Protocol1PacketHandler or Protocol2PacketHandler
dynamixel::PacketHandler *packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOCOL_VERSION);
int index = 0;
int dxl_comm_result = COMM_TX_FAIL; // Communication result
uint8_t dxl_error = 0; // Dynamixel error
uint16_t dxl_present_position = 0; // Present position
// Open port
if (portHandler->openPort())
{
}
else
{
}
Serial.print(“Succeeded to open the port!\n”);
Serial.print(“Failed to open the port!\n”);
return;
// Set port baudrate
if (portHandler->setBaudRate(BAUDRATE))
{
}
else
{
}
Serial.print(“Succeeded to change the baudrate!\n”);
Serial.print(“Failed to change the baudrate!\n”);
return;
dxl_comm_result = packetHandler->write1ByteTxRx(portHandler, DXL_ID, 26, 0,&dxl_error);
int incomingByte = 0;
while(1)
{
//
dxl_comm_result = packetHandler->read2ByteTxRx(portHandler, DXL_ID, 27, &dxl_present_position, &dxl_error);
if (Serial2.available() > 0)
{
//
Serial.println(Serial2.read()); incomingByte = Serial2.read(); Serial.println(incomingByte, DEC); if (incomingByte == 49)
{
dxl_comm_result = packetHandler->write1ByteTxRx(portHandler, DXL_ID, 26, 50,&dxl_error);
}
if (incomingByte == 50)
{
dxl_comm_result = packetHandler->write1ByteTxRx(portHandler, DXL_ID, 26, 0, &dxl_error);
}
}
}
// Close port
portHandler->closePort();
}
void loop()
{
}
Образец кода ноды для микроконтроллера NanoPi-AR:
#!/usr/bin/env python import rospy
import serial from std_msgs.msg
import String
def callback(data):
rospy.loginfo(data.data)
if data.data == “1”:
port.write(b’1’)
if data.data == “2”:
port.write(b’2’) def listener():
rospy.init_node(‘listener’, anonymous=True) rospy.Subscriber(“chatter”, String, callback)
# spin() simply keeps python from exiting until this node is stopped rospy.spin()
if name == ‘ main ’:
port = serial.Serial(“/dev/ttyS1”, baudrate=115200, timeout=100) listener()
Библиотека «PythonSDK» для микроконтроллера NanoPi-AR
#!/usr/bin/env python # -*- coding: utf-8 -*-
import os
import rospy from std_msgs.msg
import String
if os.name == ‘nt’:
import msvcrt
def getch():
return msvcrt.getch().decode()
else:
import sys, tty, termios fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd) def getch():
try:
tty.setraw(sys.stdin.fileno()) ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
from dynamixel_sdk import *
# Uses Dynamixel SDK library # Control table address
ADDR_MX_TORQUE_ENABLE = 64
# Control table address is different in Dynamixel model
ADDR_MX_GOAL_POSITION = 116
ADDR_MX_PRESENT_POSITION = 132
# Protocol version
PROTOCOL_VERSION = 1.0
# See which protocol version is used in the Dynamixel
# Default setting
DXL_ID = 9 # Dynamixel ID : 1
BAUDRATE = 57600
# Dynamixel default baudrate : 57600 DEVICENAME = ‘/dev/ttyS2’
# Check which port is being used on your controller
# ex) Windows: “COM1” Linux: “/dev/ttyUSB0”
Mac: “/dev/tty.usbserial-*”
TORQUE_ENABLE = 1 # Value for enabling the torque TORQUE_DISABLE = 0 # Value for disabling the torque DXL_MINIMUM_POSITION_VALUE = 10 # Dynamixel will rotate between this value
DXL_MAXIMUM_POSITION_VALUE = 4000 # and this value (note that the Dynamixel would not move when the position value is out of movable range. Check e-manual about the range of the Dynamixel you use.) DXL_MOVING_STATUS_THRESHOLD = 20 # Dynamixel moving status threshold
index = 0
dxl_goal_position = [DXL_MINIMUM_POSITION_VALUE, DXL_MAXIMUM_ POSITION_VALUE] # Goal position
# Initialize PortHandler instance
# Set the port path
# Get methods and members of PortHandlerLinux or PortHandlerWindows portHandler = PortHandler(DEVICENAME)
# Initialize PacketHandler instance # Set the protocol version
# Get methods and members of Protocol1PacketHandler or Protocol2PacketHandler
packetHandler = PacketHandler(PROTOCOL_VERSION)
# Open port
if portHandler.openPort():
print(“Succeeded to open the port”) else:
print(“Failed to open the port”) print(“Press any key to terminate...”) getch()
quit()
# Set port baudrate
if portHandler.setBaudRate(BAUDRATE):
print(“Succeeded to change the baudrate”) else:
print(“Failed to change the baudrate”) print(“Press any key to terminate...”) getch()
quit()
# Enable Dynamixel Torque def callback(data):
rospy.loginfo(data.data) if data.data == “1”:
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, 26, 0)
if data.data == “2”:
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, 26, 50)
def listener():
rospy.init_node(‘listener’, anonymous=True) rospy.Subscriber(“chatter”, String, callback)
# spin() simply keeps python from exiting until this node is stopped rospy.spin()
if name == ‘ main ’:
listener()
# Disable Dynamixel Torque
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_DISABLE)
if dxl_comm_result != COMM_SUCCESS:
print(“%s” % packetHandler.getTxRxResult(dxl_comm_result)) elif dxl_error != 0:
print(“%s” % packetHandler.getRxPacketError(dxl_error))
# Close port portHandler.closePort()
Управление модулем «Преобразователь интерфейсов»
Работа модуля «Преобразователь интерфейсов» по интерфейсу PWM. Подключение устройств к модулю по PWM. Пример программы для управления модулем регулирует подачу напряжения. Выбирается режим работы, записывается режим работы на 2 канала. В коде можно выста- вить параметр для первого и второго канала. Образец кода можно найти по ссылке: https://github.com/orgs/AppliedRobotics/
import os import sys
from socket import timeout
from lib.dynamixel_sdk import * #Библиотека до Dynamixel sdk !Стоит обратить внимание на маршрут библиотеки
#Обязательная инициализация if os.name == ‘nt’:
import msvcrt
def getch():
return msvcrt.getch().decode() else:
import sys, tty, termios
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
def getch():
try:
tty.setraw(sys.stdin.fileno())
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
os.system(«rs485 /dev/ttyS2 1»)
#открываем порт Dynamixel # Необходимые регистры и переменные
ADDR_BUF_A = 26
ADDR_DAC_ENABLE = 29
ADDR_MODE_SELECT = 28
# Protocol version PROTOCOL_VERSION = 1.0
# Default setting
DXL_ID = 161
BAUDRATE = 1000000
DEVICENAME = ‘/dev/ttyS2’
DAC_BUF_SIZE = 20
DAC_ENABLE = 2
DAC_DISABLE = 1
MODE_DAC = 33
#Инициализуруем обработчик порта и обработчик пакетов portHandler = PortHandler(DEVICENAME)
packetHandler = PacketHandler(PROTOCOL_VERSION)
# Открываем порт
if portHandler.openPort(): print(«Succeeded to open the port»)
else:
print(«Failed to open the port») print(«Press any key to terminate...») getch()
quit()
# Устанавливаем скорость обмена данными if portHandler.setBaudRate(BAUDRATE):
print(«Succeeded to change the baudrate») else:
print(«Failed to change the baudrate») print(«Press any key to terminate...») getch()
quit()
#Выставляем параметры для 1 и 2 канала parameters = [150, 155, 0, 0]
# Выставляем режим работы DAC
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, ADDR_MODE_SELECT, MODE_DAC)
if dxl_comm_result != COMM_SUCCESS:
print(«%s» % packetHandler.getTxRxResult(dxl_comm_result)) elif dxl_error != 0:
print(«%s» % packetHandler.getRxPacketError(dxl_error)) else:
print(«Mode selected»)
#Записываем параметры
dxl_comm_result, dxl_error = packetHandler.writeTxRx(portHandler, DXL_ ID, ADDR_BUF_A, 4, parameters)
if dxl_comm_result != COMM_SUCCESS:
print(«%s» % packetHandler.getTxRxResult(dxl_comm_result)) elif dxl_error != 0:
print(«%s» % packetHandler.getRxPacketError(dxl_error))
else:
print(«Parameters set»)
# Включаем 1 канал
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, 24,2)
if dxl_comm_result != COMM_SUCCESS:
print(«%s» % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print(«%s» % packetHandler.getRxPacketError(dxl_error)) else:
print(«PWM1 enabled») #Включаем 2 канал
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, 25, 2)
if dxl_comm_result != COMM_SUCCESS:
print(«%s» % packetHandler.getTxRxResult(dxl_comm_result)) elif dxl_error != 0:
print(«%s» % packetHandler.getRxPacketError(dxl_error)) else:
print(«PWM1 enabled»)
#Задержка в 10 секунд для проверки time.sleep(10)
#Закрываем 1 канал
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, 24, 1)
if dxl_comm_result != COMM_SUCCESS:
print(«%s» % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print(«%s» % packetHandler.getRxPacketError(dxl_error))
else:
print(«PWM disabled») #Закрываем 2 канал
dxl_comm_result, dxl_error = packetHandler.write1ByteTxRx(portHandler, DXL_ID, 25, 1)
if dxl_comm_result != COMM_SUCCESS:
print(«%s» % packetHandler.getTxRxResult(dxl_comm_result))
elif dxl_error != 0:
print(«%s» % packetHandler.getRxPacketError(dxl_error))
else:
print(«PWM disabled»)
# Закрываем порт
portHandler.closePort()
Center-nav