ГЛАВА 4. НАСТРОЙКАМОДУЛЯ TRACKINGCAM
Распознавание однотонных областей
Настройка камеры для распознавания одноцветной области сводится к заданию ее цветовых и морфологических признаков. Рассмотрим в качестве распознаваемого объекта оранжевый мяч для настольного тенниса, расположим его перед телекамерой таким образом, чтобы он целиком попадал в зону ее видимости (рис. 4.1). Это необходимо для того, чтобы выбрать все необходимые оттенки цвета, набор которых будет различен, в зависимости от внешнего освещения.
 Рис. 4.1 Пример размещения одного однотонного объекта перед камерой
Рис. 4.1 Пример размещения одного однотонного объекта перед камерой
Для выполнения первоначальной настройки необходимо подключить модуль к компьютеру с помощью кабеля USB Mini-B HighSpeed и запустить приложение TrackingCam App. В главном окне нажать кнопку Connect. В окне Image появится изображение с телекамеры. Убедившись, что модуль видит шарик целиком, зажав кнопку Ctrl на клавиатуре нажмем левой кнопкой мыши на изображение шарика в окне Image. Модуль отделит шарик от фона и применит к нему параметры распознавания по умолчанию. При этом программное обеспечение автоматически подберет набор цветовых оттенков, которые будут использоваться при распознавании. Выбранные оттенки можно наблюдать в окне палитры (Palette), при необходимости можно расширить область фиксируемых оттенков. Результат поиска выбранных оттенков отобразится в окне иллюстрации бинаризации (Line blobs). Окончательный результат распознавания области с учетом морфологических признаков отобразится в окне Blobs. Если же в окне Blobs не отображается область соответствующая шарику, либо же видно несколько областей, вызываемых прочими внешними объектами или бликами, необходимо отрегулировать настройки детектора (Blob detector settings) в главном окне. После выполнения настройки модуля необходимо выполнить их запись в память модуля, чтобы после выключения питания они сохранялись. Для этого необходимо нажать кнопку Save. После нажатия кнопки Save начнется запись настроек в память модуля, которая займет несколько секунд, после чего кнопка Save сменится на Saved. Если в главном окне вместо кнопки «Save» отображается кнопка
«Need-->», необходимо вначале выполнить синхронизацию в меню Sync. Таким образом модуль технического зрения настраивается на распознавание простых однотонных объектов (рис. 4.2).
 Рис. 4.2 Внешний вид интерфейса TrackingCamApp при настройке на однотонный объект
Рис. 4.2 Внешний вид интерфейса TrackingCamApp при настройке на однотонный объект
Модуль TrackingCam способен распознавать до 10 однотонных областей разных оттенков. Для настройки камеры на работу в этом режиме необходимо в главном окне выбрать требуемое число шаблонов переключателем Number of patterns to process — каждый шаблон отвечает за определенный оттенок — и затем по очереди настроить каждый шаблон по аналогии как настраивается модуль на отслеживание и распознавание одной области. Для этого необходимо поочередно выбирать текущий настраиваемый шаблон в переключателем Pattern selected for setting up и последовательно выполнять настройки для каждого требуемого цвета(оттенка). В качестве примера рассмотрим процесс настройки телекамеры на распознавание оранжевого мячика и синего кубика (рис. 4.3).
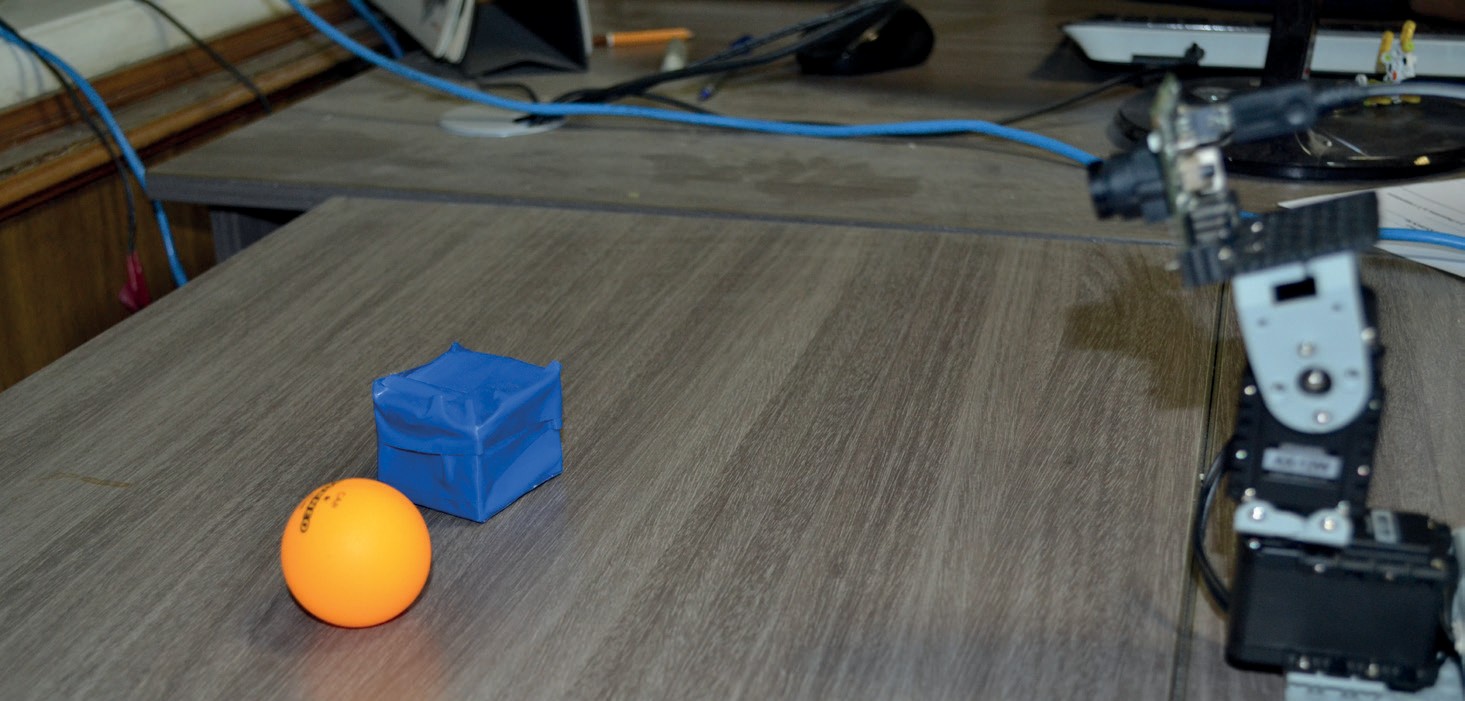 Рис. 4.3 Пример размещения двух однотонных объектов перед камерой
Рис. 4.3 Пример размещения двух однотонных объектов перед камерой
Первый шаблон будет отвечать за распознавание шарика, второй — кубика. После настройки, для получения информации о распознанных областях можно нажать на каждую область в окне Blobs и в консоль будет выведена вся информация о выбранной области. Эта информация будет содержать в себе данные о его типе/шаблоне (type), положении центра (cx, cy), площади в пикселях (area), площади описанного многоугольника (convex area), значения округлости (circularity), вытянутости (inertia), выпуклости (convexity), угол поворота (angle), ширину/высоту (w, h) и длину большей диагонали габаритного многоугольника (max axis). Применительно к ситуации с шариком и кубиком информация может выглядеть следующим образом (рис. 4.4): Здесь Blob[0] — область соответствующая оранжевому шарику, а Blob[1] — синему квадрату. После выполнения на-
стройки модуля параметры необходимо загрузить в модуль аналогично случаю с распознаванием одной области.
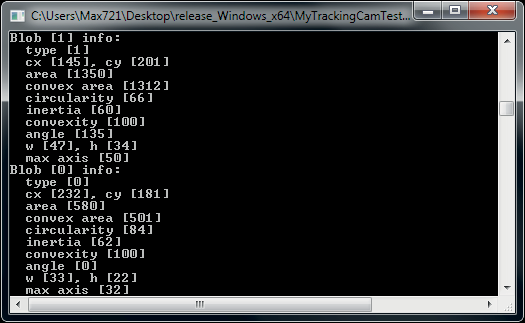 Рис. 4.4 Пример вывода информации о распознанных областях
Рис. 4.4 Пример вывода информации о распознанных областях
Распознавание разноцветных объектов
Помимо задач распознавания однотонных областей, зачастую возникает задача отслеживания разноцветных объектов, например, многоцветных меток — маркеров. Для этого модуль TrackingCam настраивается на распознавание составных объектов, которые описываются взаимными размерами, положением, ориентацией и прочими параметрами, входящих в них однотонных областей. При объединении однотонных областей в составные объекты разработчики модуля условно называют их узлами (Node) объекта, а векторы связывающих их параметров связями (Link). Модуль TrackingCam способен отслеживать одновременно до 5 объектов, состоящих максимум из 3-х узлов.
Разберем на примере процесс настройки модуля на распознавание объекта, состоящего из оранжевой и синей областей. Для необходимо аналогично тому, как проводилась настройка на распознавание оранжевой области, настроить его на распознавание еще одной синей области, выбрав 2-й шаблон переключателем Number of patterns to process и 2-й шаблон переключателем Pattern selected for setting up в главном окне. После этих манупуляций в окне Blobs будут отображаться сразу 2-е разных области. Затем необходимо зайти в окно Object Detector (рис. 4.5), нажав кнопку Object и выбрать из какого количества узлов он будет состоять переключателем «Type (Number of nodes)».
В данном случае объект состоит из 2-х цветных областей (Two blobs). Также необходимо выбрать один шаблон переключателем количества распознаваемых объектов Number of objects to detect. После этого на схеме объекта окажутся подсвеченными 2 узла и образуется связь между ними. При необходимости можно подкрутить их параметры в соответствующих окнах. После настройки параметров искомого объекта необходимо нажать кнопку Close в окне Object Detector и затем в окне Blobs можно будет увидеть оба ранее определенных области, объединенных в один объект. После выполнения настройки модуля параметры необходимо сохранить в модуль аналогичным ранее рассмотренному способом. Текущую информацию о параметрах как отдельных областей, так и целиком всего объекта можно посмотреть в терминале. Информация о параметрах областей, входящих в состав объекта, получается аналогично случаю распознавания отдельных областей — путем нажатия на интересующую область в окне Blobs. Для вывода сведений обо всех найденных объектах необходимо в окне Object Detector нажать кнопку Print, после чего в консоль будет выведена информация о структуре каждого объекта (из какого количества узлов он состоит) и его узлах: номер шаблона, к которому он относится, вошедшая в него цветная область (Type), порядковые номера цветных областей, степень соответствия распознанного объекта заданному шаблону (Similarity), размер объекта (Size) в единицах заданной меры и угол ориентации (рис. 4.6).
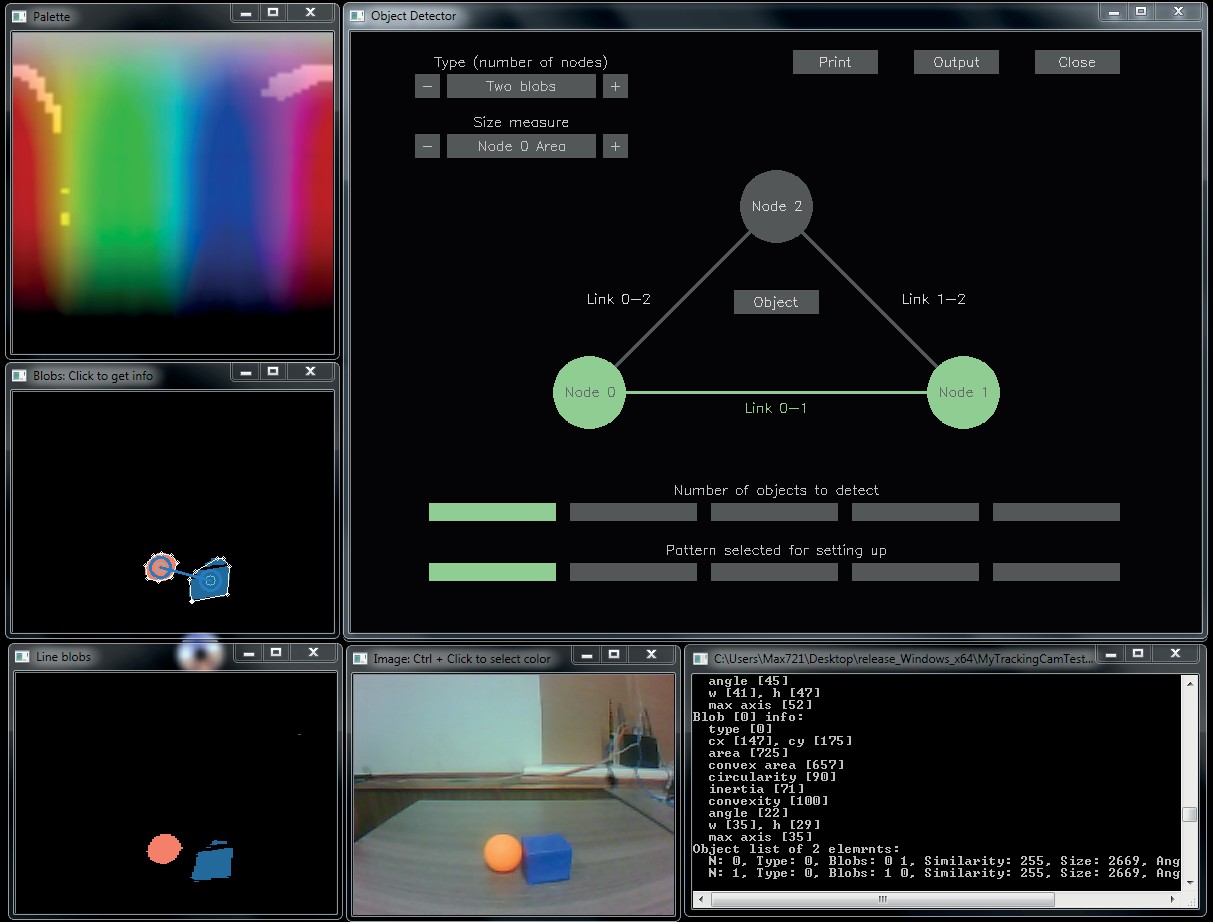 Рис. 4.5 Пример размещения двух однотонных объектов перед камерой
Рис. 4.5 Пример размещения двух однотонных объектов перед камерой
Работа модуля в режиме распознавания объектов может быть полезна при решении задач соревновательного направления — распознавания различных цветовых меток, следования по линиям, состоящим из разноцветных областей, классификация окружающих объектов.
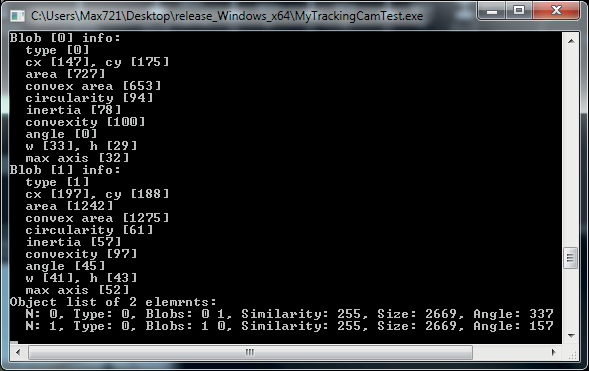 Рис. 4.6 Пример вывода информации об узлах распознанного объекта
Рис. 4.6 Пример вывода информации об узлах распознанного объекта
Center-nav