Подключение модуля TrackingCam v3 к контроллеру КПМИС
Способы подключения модуля TrackingCam v3, рассмотренные в данном разделе, одинаково подходят как для «Контроллера КПМИС», так и для «Универсального вычислительного модуля DXL-IoT». Пример программного кода, в таком случае, так же будет идентичен.
Использование интерфейса 1-wire TTL
В данном случае, подключение выполняется через 3х пиновые разъемы интерфейса 1-wire TTL, используя протокол Dynamixel для обмена данными (Рис. 5.1.).
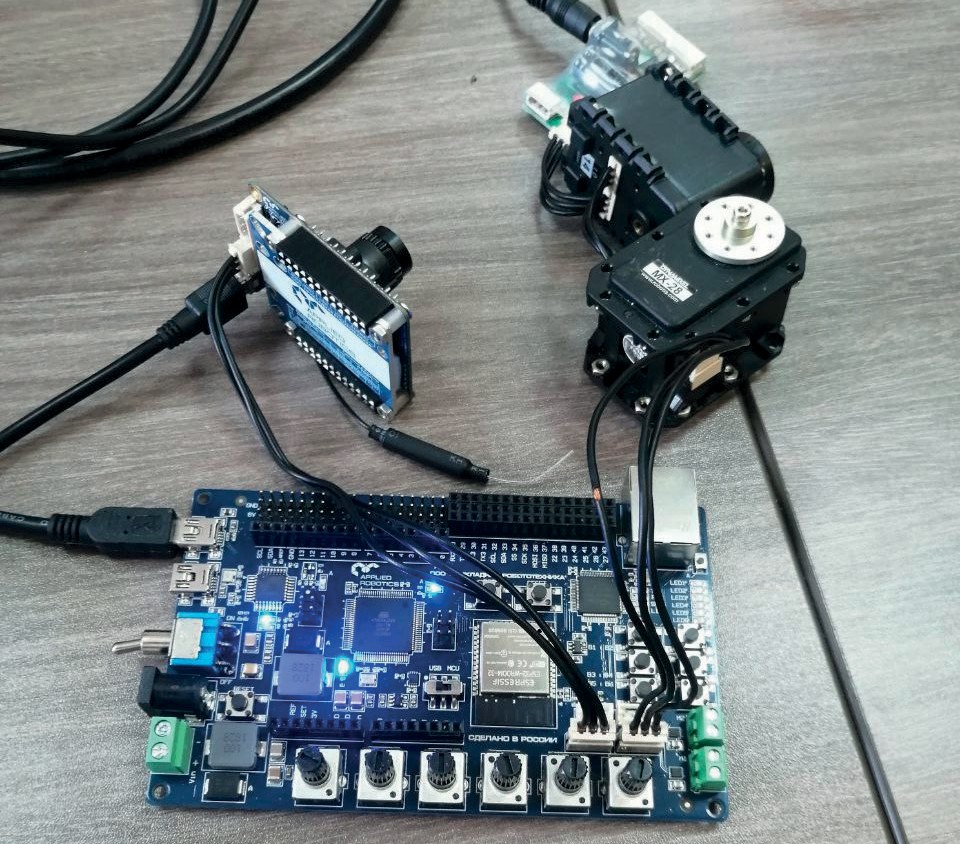 Рис. 5.1. Подключение модуля TrackingCam v3 к контроллеру КПМИС вместе с сервоприводами DYNAMIXEL
Рис. 5.1. Подключение модуля TrackingCam v3 к контроллеру КПМИС вместе с сервоприводами DYNAMIXEL
Далее для работы с модулем TrackingCam v3 необходимо установить в Arduino IDE библиотеку TrackingCamDxl, а для управления сервоприводами – DxlMaster. Данные библиотеки можно скачать по ссылке:
http://appliedrobotics.ru/?page_id=633
В первую очередь, необходимо инициализировать скачанные библиотеки:
#include «TrackingCamDxl.h»
#include «DxlMaster.h»
const long unsigned int baudrate = 1000000;
DynamixelMotor motor(2);
DynamixelMotor motor1(3);
TrackingCamDxl trackingCam(1);
unsigned long previousMillis = 0;
В setup мы инициализируем serial-порты и объявляем моторы. В loop происходит основная работа программы. Считывание информации с модуля технического зрения происходит с помощью функции trackingCam. readObjects(). Одновременно модуль может обрабатывать всего комплексных 5 объектов, поэтому в качестве аргумента функция принимает число 5.
uint8_t n = trackingCam.readObjects(5);
Далее идет вывод полученной информации:
Serial.print(trackingCam.obj[0].type, DEC); // выводит номер блоба объекта
Serial.print(« «);
Serial.print(trackingCam.obj[0].cx, DEC); // выводит координату блоба по х
Serial.print(« «);
Serial.print(trackingCam.obj[0].cy, DEC); // выводит координату блоба по y
Serial.print(« «);
Serial.print(trackingCam.obj[0].angle, DEC); // выводит площадь блоба
Serial.print(« «);
Также необходимо проверить параметры инициализации модуля TrackingCam v3. Метод trackingCam3.init должен выглядеть следующим образом:
trackingCam.init(1, 1, 1000000, 30);
- первый аргумент - id модуля технического зрения TrackingCam v3;
- второй аргумент - номер serial-порта, реализующего интерфейс ( Serial (Rx\Tx),Serial1 (Rx1\Tx1) - 1, Serial2 (Rx2\Tx2) - 2, Serial3 (Rx3\Tx3) - 3);
- третий аргумент - скорость обмена информацией (baud_rate);
- четвертый аргумент - временная задержка (time_out);
Перейдя по ссылке http://trackingcam3.local/, открываем вкладку
«Settings» и активируем необходимый режим передачи. Например, для передачи данных о распознанных blob-объектах активируем режим
«Blob detector», как показано на Рис. 5.2.
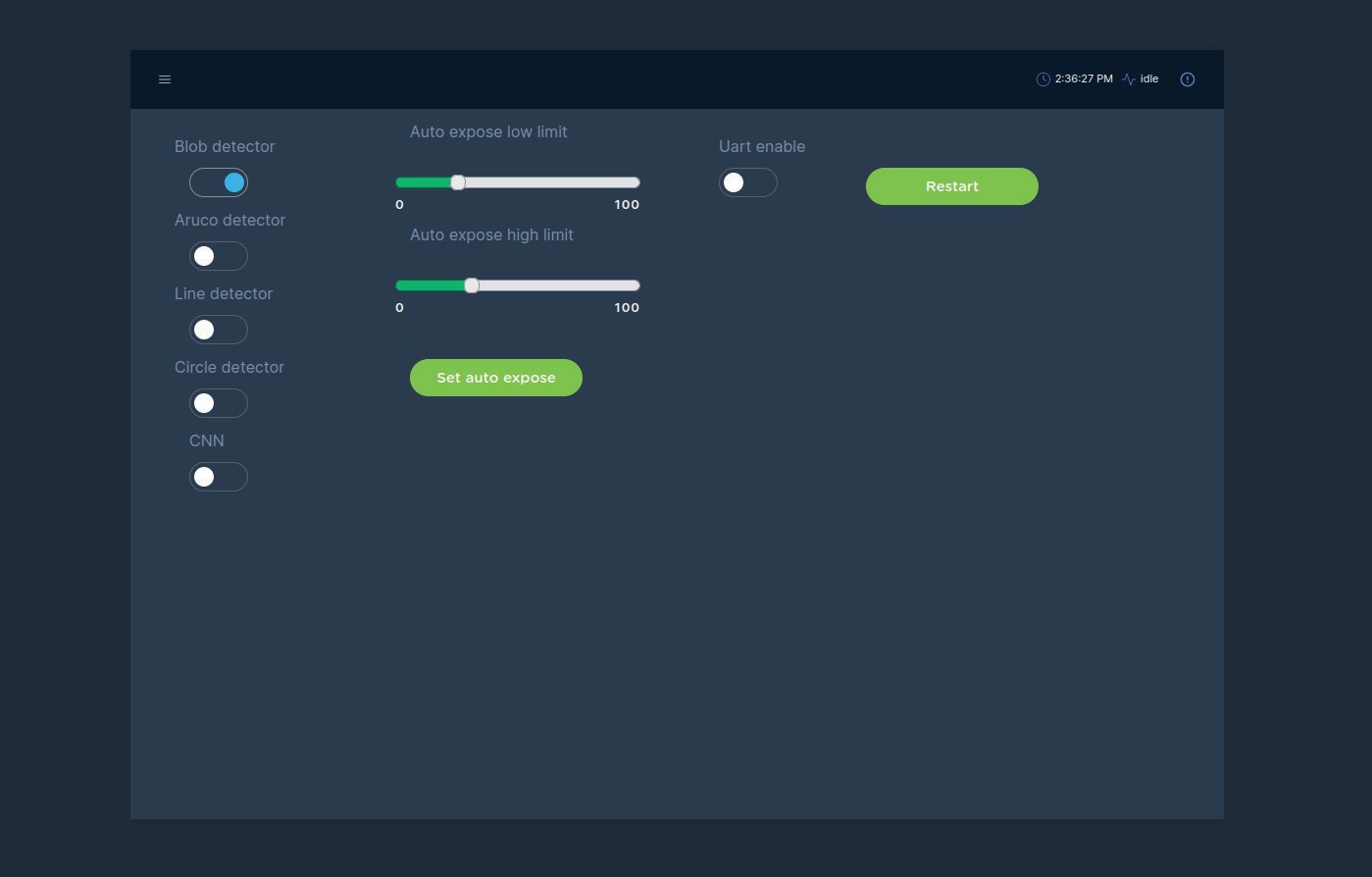 Рис. 5.2. Активация режима передачи данных о блоб-объектах по интерфейсу 1-wire TTL
Рис. 5.2. Активация режима передачи данных о блоб-объектах по интерфейсу 1-wire TTL
Для передачи данных о распознанных Aruco-маркерах, линиях и окружностях, необходимо активировать соответствующий режим. Загру- жаем скетч на контроллер с 3х пиновым разъемом. Открыв serial-порт, можно увидеть следующую картину (Рис. 5.3):
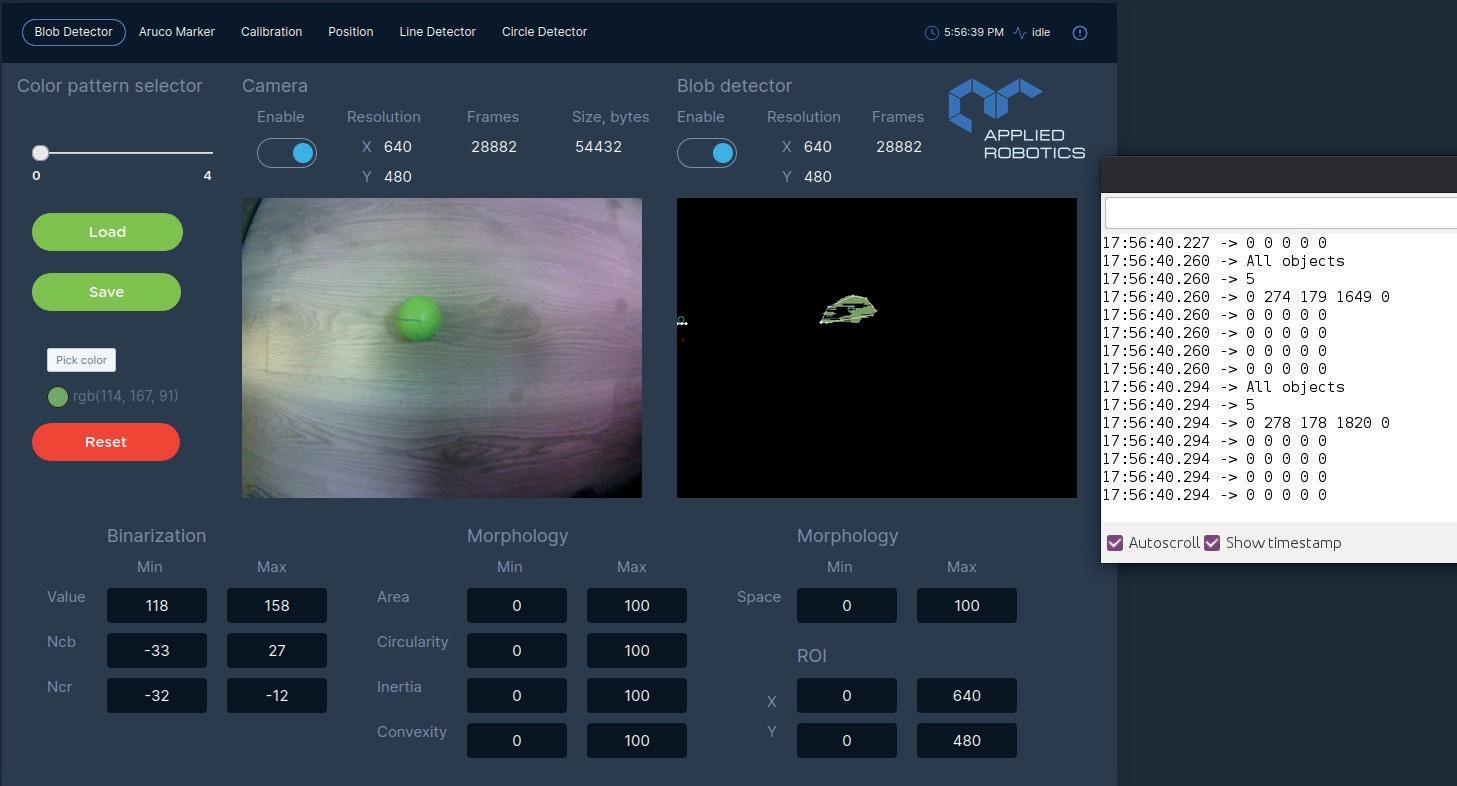 Рис. 5.3. Вывод переданных данных об отслеживаемом объекте в монитор порта
Рис. 5.3. Вывод переданных данных об отслеживаемом объекте в монитор порта
Модуль TrackingCam v3 выводит в serial-порт следующие строки:
- Первый столбец отвечает за номер блоба от 0 до 4.
- Второй столбец отвечает за координату x блоба.
- Третий столбец отвечает за координату y блоба.
- Четвертый столбец показывает площадь блоба в пикселях.
Код, реализующий прием данных, и вывод их в монитор порта выглядит следующим образом:
#include «TrackingCamDxl.h»
#include «DxlMaster.h»
const long unsigned int baudrate = 1000000;
DynamixelMotor motor(2);
DynamixelMotor motor1(3);
TrackingCamDxl trackingCam(1);
unsigned long previousMillis = 0; // stores last time cam was updated\
void setup() {
// Init Dynamixel interface
DxlMaster.begin(1000000);
Serial.begin(1000000);
delay(100);
uint8_t status = motor.init();
uint8_t status1 = motor1.init();
motor.enableTorque();
motor.wheelMode();
motor1.enableTorque();
motor1.wheelMode();
}
void loop() {
uint8_t n = trackingCam.readBlobs(5); // read data about 5 first objects
Serial.println(«All blobs»); // print information about all objects
Serial.println(n); // print numbers of objects
Serial.print(trackingCam.blob[0].type, DEC); Serial.print(« «); Serial.print(trackingCam.blob[0].dummy, DEC); Serial.print(« «); Serial.print(trackingCam.blob[0].cx, DEC); Serial.print(« «); Serial.print(trackingCam.blob[0].cy, DEC); Serial.print(« «); Serial.print(trackingCam.blob[0].area, DEC); Serial.println(«»);
if (trackingCam.blob[0].area > 15320)
{
motor.speed(200);
motor1.speed(-200);
}
else {
motor.speed(200); motor1.speed(-200);
motor.speed(-200); motor1.speed(200);
}
// wait for the next frame
while(millis() - previousMillis < 33)
{};
previousMillis = millis();
}
В данном примере, помимо простого вывода данных, происходит управление сервоприводами, в зависимости от площади пятна распознанного объекта.
Использование интерфейса UART
По умолчанию, обмен данными происходит по dxl. Для того, чтобы переключить его на UART, необходимо выполнить следующие действия:
-
Перейти по ссылке http://trackingcam3.local/ и открыть вкладку «Settings».
-
Активировать режим передачи по UART (Рис. 5.4).
Рис. 5.4. Включение режима передачи данных через интерфейс UART
 Рис. 5.5. Подключение модуля TrackingCam v3 к вычислительному контроллеру через интерфейс UART
Рис. 5.5. Подключение модуля TrackingCam v3 к вычислительному контроллеру через интерфейс UART
Далее необходимо выполнить соединение модуля TrackingCam v3 и контроллера, в соответствии с приведенной ниже схемой:
| Контроллер | Модуль TrackingCam v3 |
|---|---|
| TX1 | RX |
| RX1 | TX |
| 5V | +5 |
| GND | GND |
Соединение будет выглядеть приблизительно следующим образом (Рис. 5.5).
Для получения данных от модуля TrackingCam v3 с помощью Arduino Mega-подобного контроллера через интерфейс UART необходимо загрузить библиотеку «TrackingCamDxlUart», скачать которую можно по следующей ссылке:
http://appliedrobotics.ru/?page_id=633
Затем, необходимо открыть среду Arduino IDE и загрузить скетч
«readBlobs» в контроллер, после чего информация о считанных блобах будет выводиться в Serial Monitor.
Основной момент кода – инициализация модуля:
trackingCam.init(1, 1, 1000000, 30);
где первый аргумент – id модуля TrackingCam v3 (по умолчанию, равен «1»);
второй аргумент - номер Serial Port (Serial (Rx\Tx) - 0, Serial1 (Rx1\Tx1)
- 1, Serial2 (Rx2\Tx2) - 2, Serial3 (Rx3\Tx3) - 3); третий аргумент - скорость обмена; четвертый аргумент - задержка в мс.
Код опроса модуля TrackingCam v3 через интерфейс UART будет выглядеть следующим образом:
/* Arduino UART blobs example. * Settings: Blob detector, UART full duplex, addr 51, Dynamixel API, 5V. * Wiring:
* Camera Arduino Camera
-
1-VF >|O O| 2-+5 TX1 - RX
-
3-Gnd |O O| 4-Gnd RX1 - TX
-
5-TX O O| 6-RX 5V - +5
-
7-SCK |O O| 8-SNS Gnd - Gnd
-
9-IC0 |O O| 10-ID1 */
#include «TrackingCamDxlUart.h» TrackingCamDxlUart trackingCam;
unsigned long previousMillis = 0; // stores last time cam was updated
void setup() {
/* TrackingCamDxlUart::init(uint8_t cam_id, uint8_t serial_port, uint32_t baud_rate, uint8_t timeout)
- cam_id - 1..252, default 51
- Serial_port:
- Serial (Rx\Tx) - 0
- Serial1 (Rx1\Tx1) - 1
- Serial2 (Rx2\Tx2) - 2
- Serial3 (Rx3\Tx3) - 3
- baud_rate - default 115200
- timeout - in ms - default 30
*/
trackingCam.init(1, 1, 1000000, 30); Serial.begin(115200);
delay(5000);
}
void loop() {
uint8_t n = trackingCam.readBlobs(5); // read data about first 5 blobs
Serial.println(«All blobs»);
Serial.println(n); // print numbers of blobs
for(int i = 0; i < n; i++) // print information about all blobs
{
Serial.print(trackingCam.blob[i].type, DEC); Serial.print(« «); Serial.print(trackingCam.blob[i].dummy, DEC); Serial.print(« «); Serial.print(trackingCam.blob[i].cx, DEC); Serial.print(« «); Serial.print(trackingCam.blob[i].cy, DEC); Serial.print(« «); Serial.print(trackingCam.blob[i].area, DEC); Serial.print(« «); Serial.print(trackingCam.blob[i].left, DEC); Serial.print(« «); Serial.print(trackingCam.blob[i].right, DEC); Serial.print(« «); Serial.print(trackingCam.blob[i].top, DEC); Serial.print(« «); Serial.print(trackingCam.blob[i].bottom, DEC); Serial.println(« «);
}
// wait for the next frame
while(millis() - previousMillis < 33)
{};
previousMillis = millis();
}
Подключение модуля TrackingCam v3 к универсальному контроллеру STEM Board
В данном случае, подключение выполняется через 3х пиновые разьемы интерфейса 1-wire TTL, используя протокол Dynamixel для обмена данными (Рис. 5.6).
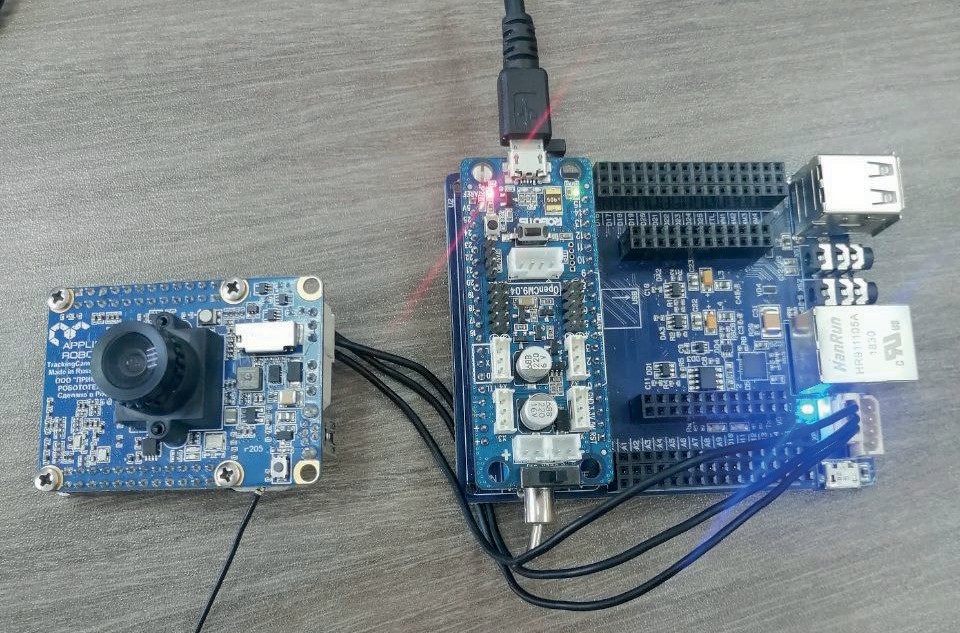 Рис. 5.6. Подключение модуля TrackingCam v3 к универсальному контроллеру STEM Board
Рис. 5.6. Подключение модуля TrackingCam v3 к универсальному контроллеру STEM Board
Для совместной работы модуля TrackingCam v3 и универсального контроллера STEM Board необходимо скачать соответствующую библиотеку для среды разработки Arduino IDE (подробнее в соответствующем методическом указании).
Ниже разберем основные элементы программы:
void setup()
{
Serial.begin(57600);
while (!dxl_wb.init(DEVICE_NAME, BAUDRATE))
{}
while (!dxl_wb.ping(CAM_ID))
{}
}
В setup происходит инициализация модуля TrackingCam v3 (значение id модуля, по умолчанию, равно «1»).
В основном цикле loop происходит считывание параметров блобов.
blob[i].type = resp[idx++];
if (blob[i].type == 0xFF) break;
blob[i].cx = resp[idx] + (resp[idx + 1] << 8); idx += 2;
blob[i].cy = resp[idx] + (resp[idx + 1] << 8); idx += 2;
blob[i].area = (resp[idx] + (resp[idx + 1] << 8)) * 4; idx += 2;
blob[i].left = resp[idx] + (resp[idx + 1] << 8); idx += 2;
blob[i].right = resp[idx] + (resp[idx + 1] << 8); idx += 2;
blob[i].top = resp[idx] + (resp[idx + 1] << 8); idx += 2;
blob[i].bottom = resp[idx] + (resp[idx + 1] << 8); idx += 2;
n++;
здесь:
- blob[i].cx - координата блоба по OX
- blob[i].cy - координата блоба по OY
- blob[i].area - площадь i-ого блоба
- blob[i].left - отступ слева
- blob[i].right - отступ справа
- blob[i].top - отступ сверху
- blob[i].bottom - отступ снизу
Далее идет вывод полученных данных:
Serial.print(
String(blob[i].type) + « « +
String(blob[i].cx) + « « +
String(blob[i]. cy) + « « +
String(blob[i].area) + « « +
String(blob[i].left) + « « +
String(blob[i].right) + « « +
String(blob[i].top) + « « +
String(blob[i].bottom) +
«\n»);
#include <DynamixelWorkbench.h>
#define BAUDRATE 1000000
#define CAM_ID 1
#define DEVICE_NAME «3»
struct TrackingCamBlobInfo_t
{
uint8_t type;
uint8_t dummy;
uint16_t cx;
uint16_t cy;
uint32_t area;
uint16_t left;
uint16_t right;
uint16_t top;
uint16_t bottom;
};
DynamixelWorkbench dxl_wb;
unsigned long previousMillis = 0; // stores last time cam was updated
void setup()
{
Serial.begin(57600);
while (!dxl_wb.init(DEVICE_NAME, BAUDRATE))
{}
while (!dxl_wb.ping(CAM_ID))
{}
}
void loop()
{
int max_n = 5;
int n = 0;
TrackingCamBlobInfo_t blob[10];
for (int i = 0; i < max_n; i++)
{
uint32_t resp[16];
if (!dxl_wb.readRegister(CAM_ID, 16 + i * 16, 16, resp)) break;
int idx = 0;
blob[i].type = resp[idx++];
if (blob[i].type == 0xFF) break;
blob[i].dummy = resp[idx++];
blob[i].cx = resp[idx] + (resp[idx + 1] << 8); idx += 2;
blob[i].cy = resp[idx] + (resp[idx + 1] << 8); idx += 2;
blob[i].area = (resp[idx] + (resp[idx + 1] << 8)) * 4; idx += 2;
blob[i].left = resp[idx] + (resp[idx + 1] << 8); idx += 2;
blob[i].right = resp[idx] + (resp[idx + 1] << 8); idx += 2;
blob[i].top = resp[idx] + (resp[idx + 1] << 8);
idx += 2;
blob[i].bottom = resp[idx] + (resp[idx + 1] << 8); idx += 2;
n++;
}
Serial.println(«n = « + String(n));
for (int i = 0; i < n; i++)
{
Serial.print(
String(blob[i].type) + « « +
String(blob[i].cx) + « « +
String(blob[i].cy) + « « +
String(blob[i].area) + « « +
String(blob[i].left) + « « +
String(blob[i].right) + « « +
String(blob[i].top) + « « +
String(blob[i].bottom) +
«\n»);
}
// wait for the next frame
while (millis() - previousMillis < 33)
{};
previousMillis = millis();
}
Подключение модуля TrackingCam v3 к операционной системе ROS
Настройка пакета ROS
Модуль технического зрения TrackingCam v3 может работать не только с микроконтроллерами, но и с полноценными компьютерами на базе различных операционных систем. Наиболее часто используемым в робототехнике инструментом для работы является фреймворк ROS (Robot Operating System), который позволяет множеству различных устройств взаимодействовать между собой. Для интеграции модуля TrackingCam v3 c ROS (требуется ROS версии Noetic) предлагается использовать специальный пакет, доступный по ссылке: https://github.com/AppliedRobotics/tc3-ros-package.git
В данном пакете содержится драйвер, реализующий считывание данных с модуля технического зрения и отправку их в операционную систему ROS. В зависимости от того, какие алгоритмы в данный момент активированы в GUI TrackingCam v3 в систему ROS могут отправляться следующие данные:
- Детектируемые цветовые блобы.
- Детектируемые Aruco-маркеры и их tf преобразования.
- Детектируемые линии.
- Детектируемые круглые объекты.
Для запуска алгоритма связи с модулем TrackingCam v3 предварительно необходимо установить библиотеку motorcortex-python для языка
программирования Python. Для этого используется установщик библиотек для Python pip, запускаемый командой:
sudo -H pip3 install motorcortex-python
Если на вашем ПК не установлен pip, его можно установить командой:
sudo apt install python3-pip
Для тестирования пакета необходимо создать рабочее окружение.
Для этого создайте папку «tc3_test_ws»: mkdir tc3_test_ws
В ней нужно создать папку «src»:
cd tc3_test_ws mkdir src
Перейдите в папку «src» и скачайте пакет по ссылке, представленной выше:
git clone https://github.com/AppliedRobotics/tc3-ros-package.git Далее, необходимо вернуться в папку рабочего окружения и скомпилировать пакет.
Для этого нужно сделать следующие действия (Рис. 5.7):
cd .. catkin_make
После того, как проект будет скомпилирован, можно переходить к запуску. Для этого нужно подключить модуль TrackingCam v3 к компьютеру при помощи USB и в интерфейсе настройки включить любой из алгоритмов детектирования. После подключения модуля можно запустить программу для считывания данных и их отправки в ROS. Для этого в папке «tc3_test_ws» необходимо выполнить две команды:
source devel/setup.bash
roslaunch tc3-ros-package tc3.launch
При успешном запуске в терминале появится следующее (Рис. 5.8):
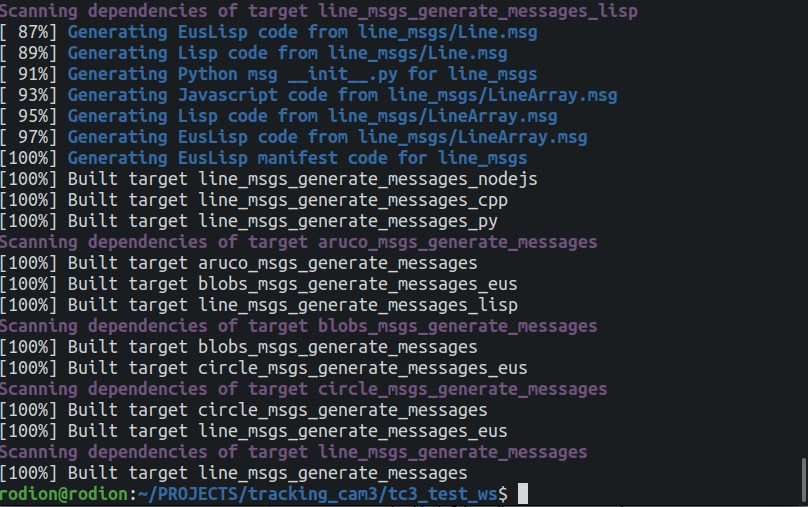 Рис. 5.7. Компиляция пакета
Рис. 5.7. Компиляция пакета
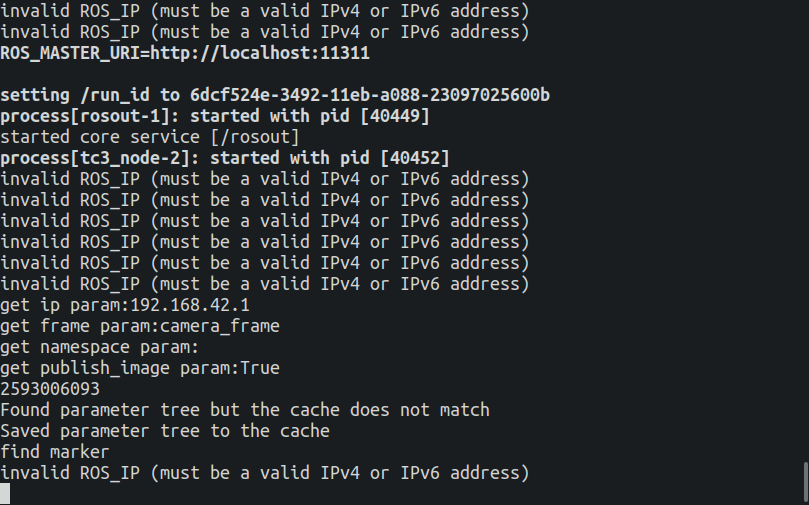 Рис. 5.8. Запуск ROS пакета
Рис. 5.8. Запуск ROS пакета
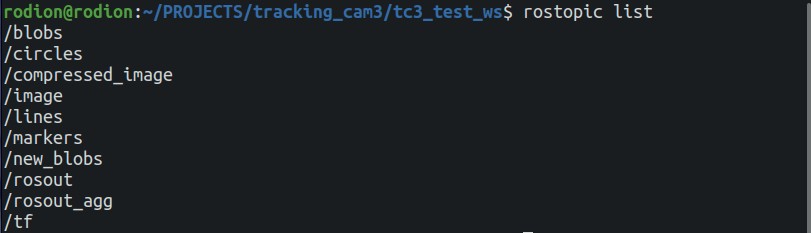 Рис. 5.9. Новые топики в системе после запуска пакета
Рис. 5.9. Новые топики в системе после запуска пакета
Обмен данными с модулем TrackingCam v3
Для взаимодействия с модулем TrackingCam v3 используется следующий набор топиков:
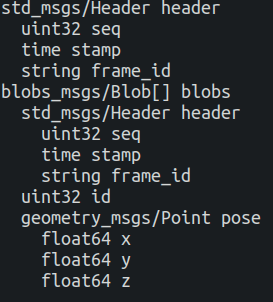
/blobs - цветовые блобы, распознаваемые при помощи алгоритма
«Blob Detector». Используются сообщения типа blobs_msgs/BlobArray, которые имеют следующую структуру:
Здесь «Header» - заголовок сообщения, «blobs» - массив распознанных цветовых блобов. У каждого из элементов массива есть свой заголовок, параметр id (порядковый номер блоба - соответствует номеру, выставленному в интерфейсе настройки), а также координаты центра блоба («pose») в пикселях камеры x и y.
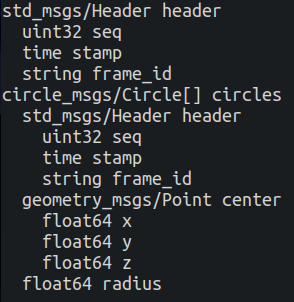
 /circles – окружности, распознаваемые с помощью алгоритма
«Circle Detector». Используется сообщение circle_msgs/CircleArray:
Здесь «Header» - заголовок сооб- щения, «circles» - массив распозна- ваемых окружностей. У каждого из элементов массива есть свой заго- ловок и координаты центра окруж- ности («center») в пикселях камеры x и y.
/circles – окружности, распознаваемые с помощью алгоритма
«Circle Detector». Используется сообщение circle_msgs/CircleArray:
Здесь «Header» - заголовок сооб- щения, «circles» - массив распозна- ваемых окружностей. У каждого из элементов массива есть свой заго- ловок и координаты центра окруж- ности («center») в пикселях камеры x и y.
 /image – изображение, поступающее с камеры (с помощью него можно реализовывать алгоритмы для каких-либо специфичных ситуаций). Используется сообщение «sensor_msgs/Image». Визуализировать изображение можно при помощи утилиты «rqt» (Рис. 5.10)
/image – изображение, поступающее с камеры (с помощью него можно реализовывать алгоритмы для каких-либо специфичных ситуаций). Используется сообщение «sensor_msgs/Image». Визуализировать изображение можно при помощи утилиты «rqt» (Рис. 5.10)
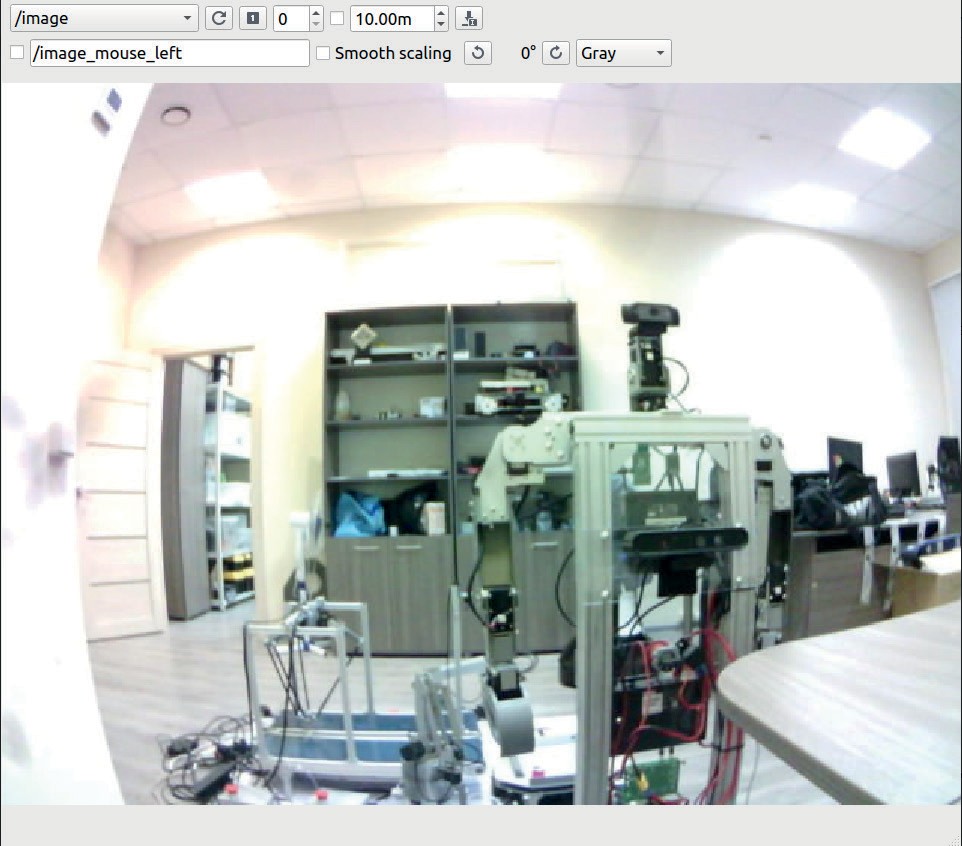 Рис. 5.10. Изображение с камеры, выведенное через утилиту «rqt»
Рис. 5.10. Изображение с камеры, выведенное через утилиту «rqt»
/lines* – линии, распознаваемые при помощи алгоритма «Line Detector». Используются сообщения «line_msgs/LineArray**»:
Здесь «Header» - заголовок сообщения, «lines» - массив распознаваемых линий. У каждого из элементов массива есть свой за- головок и координаты начальной (first) и конечной (second) точки линий в пикселях камеры x и y.

/markers – Aruco-маркеры. Используется тип сообщений «aruco msgs/MarkerArray_»:
Здесь Header - заголовок сооб- щения, markers - массив задетек- тированных маркеров, у каждого из элементов массива есть свой заголовок, поле id, соответствую- щее номеру маркера, а также его позиция относительно камеры мо- дуля (в реальных координатах) и ориентация (в формате кватернио- на) (Рис. 5.11). Также публикуются tf преобразования каждого маркера относительно камеры модуля.
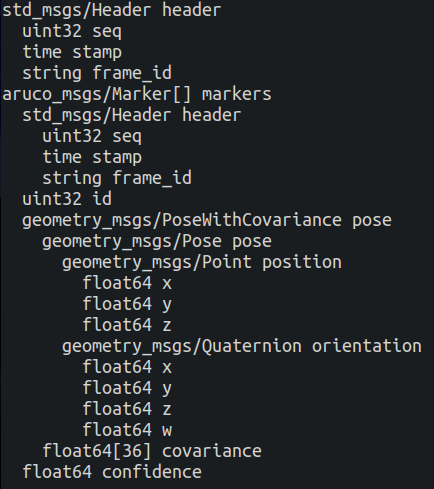
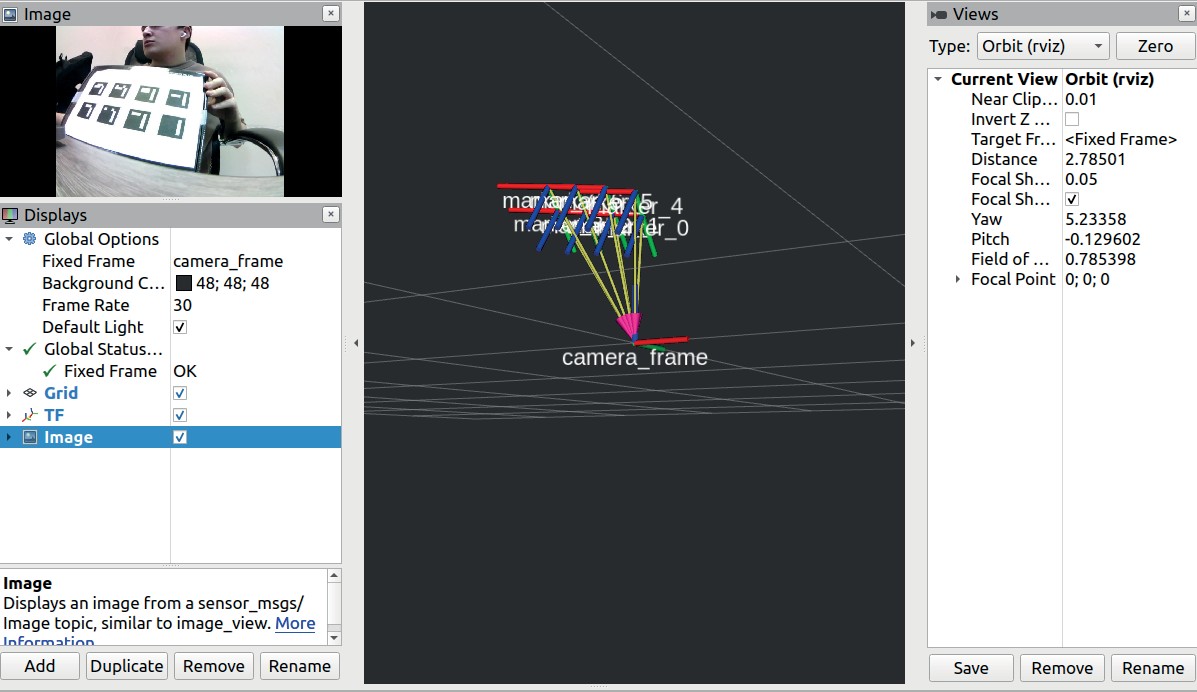 Рис. 5.11. Визуализация распознанных маркеров
Рис. 5.11. Визуализация распознанных маркеров
/new_blobs - цветовые блобы, распознаваемые при помощи алгоритма ««new blob». Используется тип сообщений «blobs_msgs/BlobArray».
Launch файлы и доступные настройки
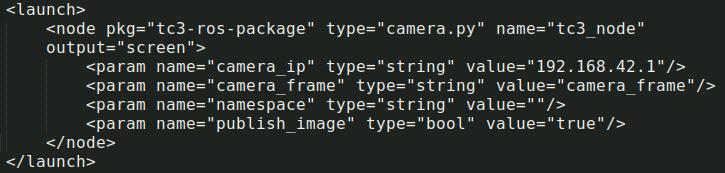
Для запуска программы общения ROS и модуля TrackingCam v3 можно использовать launch файлы, в которых доступны некоторые настраиваемые параметры. Ниже приведен пример launch файла, с помощью которого запускается нода общения:
Для запуска программы используется нода «camera.py», которая принимает следующие параметры:
- camera_ip - IP модуля технического зрения, подсоединенного к компьютеру. Стандартный IP при подключении по проводу 192.168.42.1. Если же данный IP был изменен, или же модуль с ПК находятся в одной wi-fi сети, нужно использовать новый IP модуля.
- camera_frame - имя модуля, которое будет отображаться в заголовках сообщений и tf преобразованиях. Стандартное значение - tc3.
-
namespace - префикс для имен топиков. Стандартное значение яв- ляется отсутствием какого-либо префикса. Данный параметр следует использовать при подключении нескольких модулей технического зрения к одному ПК, для разделения их топиков.
-
publich_image - логический параметр, отвечающий за публикацию/ не публикацию изображения, которое видит модуль технического зрения. Также при подключении нескольких модулей технического зрения к одному ПК, можно одновременно запустить несколько нод, и каждая нода будет считывать данные с конкретного модуля (каждый модуль должен иметь уникальный ip, например, 192.168.42.1 и 192.168.43.1):
 В данном случае, важно указать различные имена нод (параметр name в графе
В данном случае, важно указать различные имена нод (параметр name в графе <node>), в ином случае ROS выдаст ошибку запуска.
Center-nav