Подготовка рабочего пространства
В данной статье описан процесс подготовки рабочего пространства к программированию автономного полета дрона в симуляторе. Данный материал рассмотрен в вебинарах 9.10 и 14.10, записи которых находятся на главной странице, посвященной Московской Олимпиаде Школьников на нашем сайте. Для участников, которые выполнили шаги, рассмотренные в данных вебинарах, описанные шаги ниже выполнять не нужно, ваше рабочее пространство уже готово к работе
Симулятор можно скачать по ссылке. Установка и запуск симулятора на различных OС рассмотрены в видео и в вебинаре 09.10, прикрепленных на главной странице сайта.
Необходимо проделать следующие шаги:
Подготовка
- Установите git.
Linux: Откройте терминал и введите следующие команды последовательно. После последней команды выведется версия Git.
sudo apt update
sudo apt install git
git --versionWindows: Если у вас уже есть git, установите последнюю версию через сам Git. Откройте командную строку и введите команду:
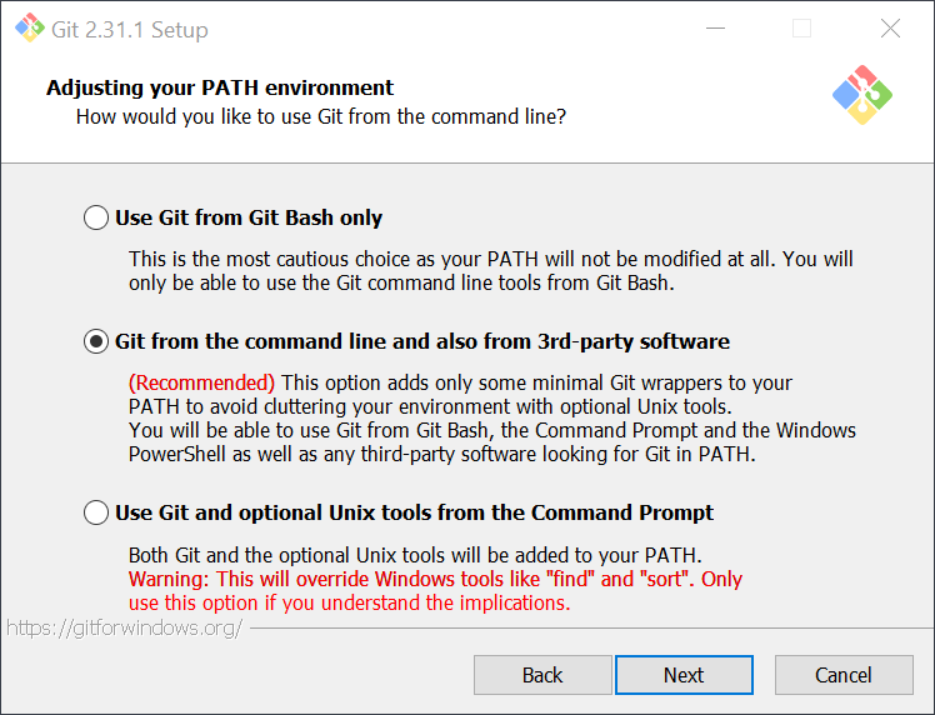
git clone https://github.com/git/gitЕсли не устанавливали git, перейдите на сайт, установите последнюю версию. При установке обязательно добавьте git в PATH, а также установите средство winget (как это сделать указано на той же странице ниже).
- Установите среду разработки Visual Studio Code.
- Установите python 3.11.
Linux: Введите следующие команды в терминале:
sudo apt update
sudo apt install python3.11
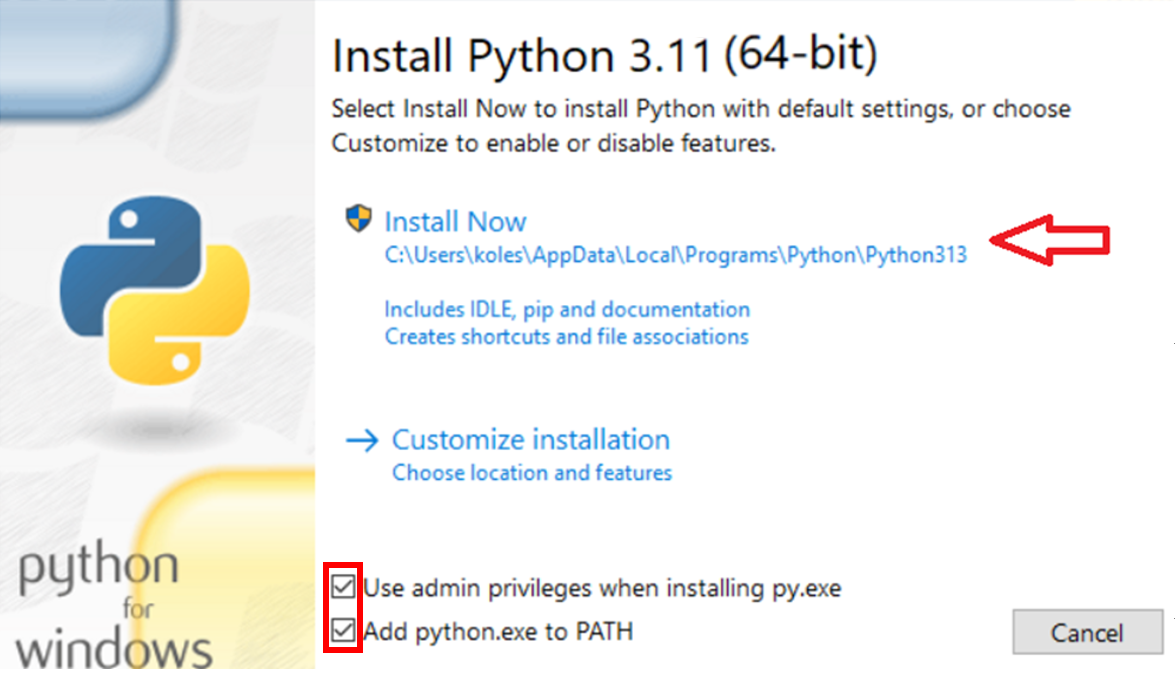
sudo apt install --reinstall python3.11 python3.11-venvWindows: Перейдите по ссылке, скачайте установочный файл и установите python3.11, обязательно добавив его в PATH:
- Установите pip — менеджер пакетов для языка python.
Linux: Введите следующую команду в терминале:
sudo apt-get install python3-pipWindows: Скачайте скрипт по ссылке Откройте терминал или командную строку, перейдите в папку, содержащую файл, и выполните:
py get-pip.py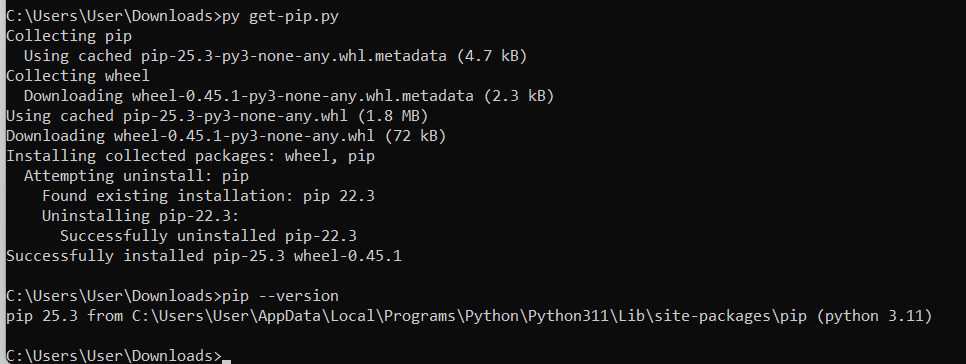
Установка API.
Процесс установки API для Windows и Linux Ubuntu продемонстрирован в видео ниже. Все вводимые команды вы можете скопировать из файла:
Установка API. Нажми, чтобы развернуть.
Для Windows:
git clone https://github.com/AgroTechAvia/TechSimApi.git
Если у вас несколько версий Python: py -3.11 -m venv .venv Если только python 3.11: python -m venv .mosh_venv
.\.mosh_venv\Scripts\activate #активация виртуального окружения Если возникла ошибка, откройте командную строку PowerShell от имени администратора, введите команду Set-ExecutionPolicy RemoteSigned и нажмите Y или А. Повторите активацию виртуального окружения. python --versiongit submodule update --init --recursivepython setup_all.pypython.exe -m pip install --upgrade pipgit clone https://github.com/AgroTechAvia/TechSimApiDroneCam.gitpip install -e .
Для Linux:
git clone https://github.com/AgroTechAvia/TechSimApi.git
Если у вас несколько версий Python: python3.11 -m venv .mosh_venv Если только python 3.11: python3 -m venv .mosh_venv
source .mosh_venv/bin/activate #активация виртуального окруженияpython3 --versiongit submodule update --init --recursivepython3 setup_all.pysudo apt-get install python3-tkgit clone https://github.com/AgroTechAvia/TechSimApiDroneCam.gitpip3 install -e .
Windows
Linux
Загрузка настроек полетного контроллера.
Перед запуском дрона в автономном режиме необходимо загрузить настройки полетного контроллера. О том, как это сделать вы можете узнать в статье "Загрузка настроек полетного контроллера при работе в симуляторе AgroTechSim" в разделе "Полезные материалы".
Запуск кода
Перед запуском кода откройте комнату в симуляторе. Проверьте, что в левом верхнем углу отображается "MSP". Если написано "RC", нажмите на клавишу "B" (англ. раскладка).
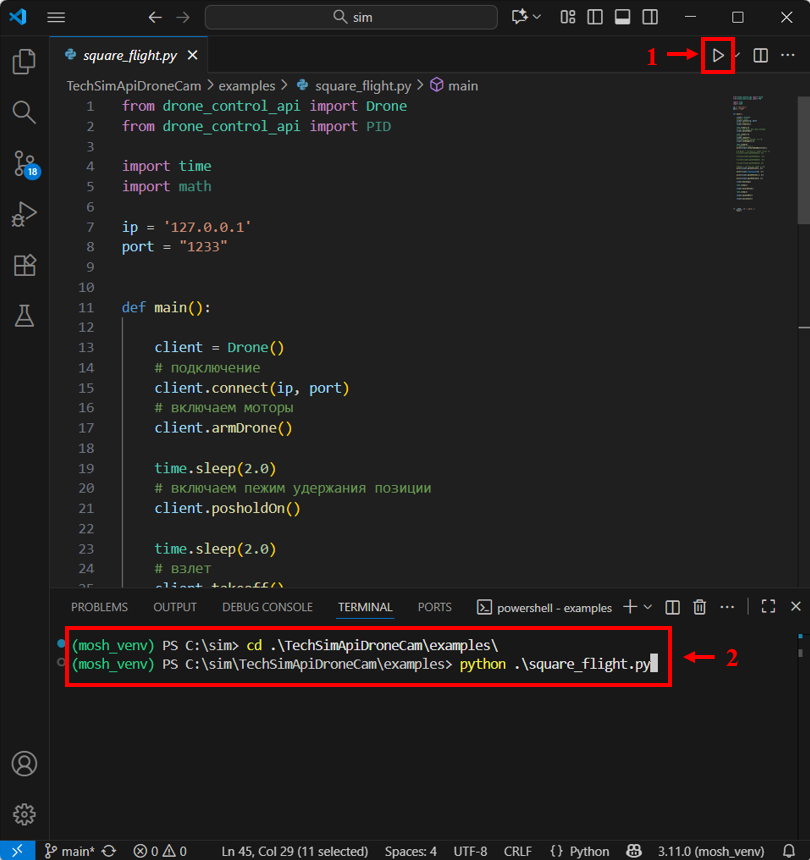
Перед запуском кода проверьте, что виртуальное окружение активировано. Запустить код вы можете двумя способами:
- Открыть код и нажать кнопку запуска программы в VSCode;
- Перейти в директорию .\TechSimApiDroneCam\examples\ и ввести команду:
Linux:
python3 <название файла>Windows:
python .\<название файла>