Лабораторная работа 16. шаговый двигатель
Цель работы:
Знакомство с работой шагового двигателя, а также использование полученных знаний и навыков для создания программы по управлению шаговым двигателем.
Теоретическая часть:
Шаговый электродвигатель - это синхронный бесщёточный электро- двигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора (неподвижной части двигателя), вызывает фиксацию ротора (подвижной части двигателя). Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов (формируемому за счет последовательной активации обмоток двигателя) соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
Шаговые двигатели — основа точной робототехники. В отличие от двигателей постоянного вращения, один оборот шагового двигателя со- стоит из множества микроперемещений, которые и называют шагами. Другими словами, мы можем повернуть вал двигателя ровно на 90 граду- сов, и зафиксировать его в этом положении. Грубым аналогом шагового двигателя является серводвигатель.
Шаговые двигатели применяют там, где требуется очень точно дозировать перемещение, например, при создании манипуляционных робототехнических систем. Чтобы «рука» манипулятора коснулась рабочим инструментом нужной точки, необходимо чтобы каждый из узлов повернулся на строго заданный угол. Погрешность в доли градуса в основании руки приведет к огромной погрешности рабочей точки.
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (Рисунок 16.1) (ротор из магнитотвердого материала). На роторе установлен один или несколько постоянных магнитов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при пода- че напряжения в соответствующие обмотки. Количество полных шагов в одном обороте таких двигателей зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно, в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
- Реактивный двигатель (Рисунок 16.2). Такие двигатели называют двигателями с переменным магнитным сопротивлением. Реактивный шаговый двигатель не оснащается магнитом на роторе. Ротор выполнен из магнитомягкого материала, и его конструкция в поперечном сечении
имеет вид многоконечной звезды. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах. Данные двигатели встречаются редко, так как у них наименьший крутящий момент по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей зависит от количества зубцов на звезде ротора и количества электромагнитов на статоре. Обычно, в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (Рисунок 16.3) (совмещает технологии двух предыдущих двигателей). Ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых рас- положены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент. Количество полных шагов в одном обороте таких двигателей зависит от количества постоянных магнитов на звезде ротора и от количества элек- тромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
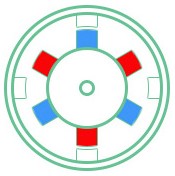 Рисунок 16.1. Двигатель с постоянными магнитами
Рисунок 16.1. Двигатель с постоянными магнитами
 Рисунок 16.2. Реактивный двигатель
Рисунок 16.2. Реактивный двигатель
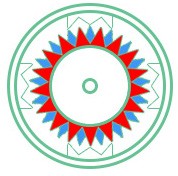 Рисунок 16.3. Гибридный двигатель
Рисунок 16.3. Гибридный двигатель
- Биполярный двигатель (Рисунок 16.4) имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потен- циалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель (Рисунок 16.5) имеет 5 выводов. Цен- тральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. На- правление магнитного поля зависит от того, на какой именно вывод об- мотки подан положительный потенциал.
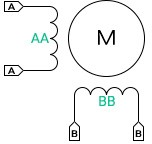 Рисунок 16.4. Биполярный двигатель
Рисунок 16.4. Биполярный двигатель
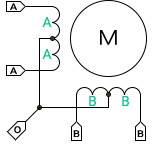 Рисунок 16.5. Униполярный двигатель
Рисунок 16.5. Униполярный двигатель
- 6-выводной двигатель (Рисунок 16.6) имеет ответвление от цен- тральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель (Рисунок 16.7) является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не толь- ко использовать как биполярный или униполярный, но и самим опреде- лять, как соединить электромагниты обмоток, последовательно или па- раллельно.
![[media/image80.jpeg]]
Рисунок 16.6. Шести - выводной двигатель
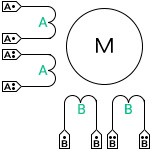 Рисунок 16.7. Восьми - выводной двигатель
Рисунок 16.7. Восьми - выводной двигатель
Электромоторы нельзя подключать к выводам контроллера напрямую, так как они потребляют значительные токи. Шаговые двигатели не являются исключением. Чтобы запитать обмотки, потребуется устройство, способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких устройств выступа- ют полупроводниковые приборы для подключения шагового двигателя,
которые называются драйверами двигателя. Драйвер – это устройство, которое связывает контроллер и шаговый двигатель.
Управление шаговым двигателем может быть реализовано по одному из четырех основных алгоритмов, которые зависят от типа соединения электромагнитов: попеременное включение фаз, управление с перекрытием фаз, полушаговое управление или микрошаговое управление (Рисунок 16.8 а-г).
В случае попеременного включения фаз в каждый момент времени питание получает только одна из фаз, и точки равновесия ротора двигтеля на каждом шагу совпадают с ключевыми точками равновесия — полюса отчетливо выражены.
Управление с перекрытием фаз позволяет ротору получить шаги к позициям между полюсными выступами статора, что увеличивает вращающий момент на 40% по сравнению с управлением без перекрытия фаз. Угол шага сохраняется, однако положение фиксации смещено — оно находится между полюсными выступами статора. Эти первые два алго- ритма применяются в электротехническом оборудовании, где очень высокая точность не требуется.
Полушаговое управление — комбинация первых двух алгоритмов: через шаг питание получают то одна фаза (обмотка), то две. Размер шага уменьшается вдвое, точность позиционирования получается более высокой, снижается вероятность наступления механического резонанса в двигателе.
В микрошаговом режиме ток в фазах меняется по величине так, что- бы положение фиксации ротора на шаг приходилось бы на точку между полюсами, причем, в зависимости от соотношения величин токов в одно- временно включенных фазах, таких шагов можно получить несколько. Регулируя соотношение токов, настраивая количество рабочих соотношений, получают микрошаги — наиболее точное позиционирование ротора. Существенным минусов биполярного режима является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа. Для обеспечения работы драйвера биполярного при- вода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами. Самым распространенным драйвером является микросхема L298N. Этот мостовой драйвер управляет двигателем с током до 2 А и
питанием до 46В.
Существует другой вид драйверов — STEP/DIR драйверы. Это аппа- ратные модули, которые работают по протоколу STEP/DIR для связи с ми- кроконтроллером. STEP/DIR драйверы расширяют возможности:
- Они позволяют стабилизировать фазные токи;
- Возможность установки микрошагового режима;
- Обеспечение защиты ключа от замыкания;
- Защита от перегрева;
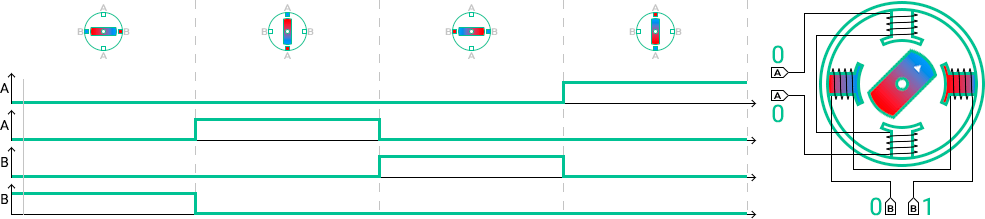 Рисунок 16.8а. Схема управления при попеременном включении фаз
Рисунок 16.8а. Схема управления при попеременном включении фаз
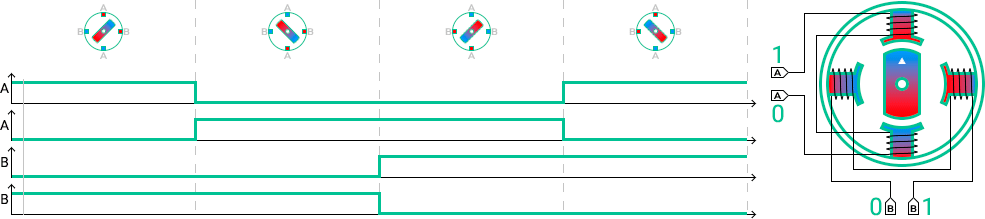 Рисунок 16.8б. Схема управления при перекрытии фаз
Рисунок 16.8б. Схема управления при перекрытии фаз
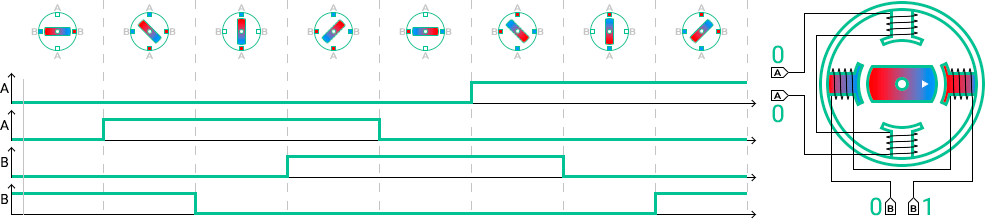 Рисунок 16.8в. Схема полушагового управления
Рисунок 16.8в. Схема полушагового управления
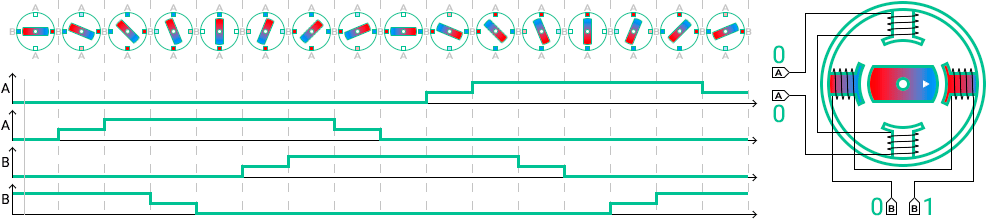 Рисунок 16.8г. Схема микрошагового управления
Рисунок 16.8г. Схема микрошагового управления
- Оптоизоляция сигнала управления, высокая защищенность от помех.
В STEP/DIR драйверах используется 3 сигнала:
- STEP – импульс, который инициирует поворот на шаг/часть шага, в зависимости от режима. От частоты следования импульсов будет определяться скорость вращения двигателя.
- DIR – сигнал, который задает направление вращения. Обычно, при подаче высокого сигнала производится вращение по часовой стрелке. Этот тип сигнала формируется перед импульсом STEP.
- ENABLE – разрешение/запрет работы драйвера. С помощью этого сигнала можно остановить работу двигателя в режиме без тока удержания.
Если нет необходимости управлять включением двигателя, вы можете не подключать этот контакт к микроконтроллеру. Тогда ток через обмотки двигателя будет течь всегда, если есть напряжение питания.
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Практическая часть.
В данной лабораторной работе необходимо разработать программу, которая будет управлять шаговым двигателем.
Схема подключения:
К данной рабочей программе используется следующая схема подключения (Рисунок 16.9). Для реализации проекта потребуются следующие компоненты: шаговый двигатель (1 шт), внешний источник питания (1 шт), драйвер на шаговый двигатель (1 шт) и провода.
Используем драйвер наиболее распространенной модели SBT0811. Для его вращения нужно подсоединить 4 провода к цифровым выходам платы (IN1, IN2, IN3, IN4). Для вращения по часовой стрелке сигнал дол- жен подаваться в следующей последовательности:
| Шаг | A | B | *A* | *B* |
|---|---|---|---|---|
| 0 | 1 | 1 | 0 | 0 |
| 1 | 0 | 1 | 0 | 0 |
| 2 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 1 | 1 |
| 5 | 0 | 0 | 0 | 1 |
| 6 | 1 | 0 | 0 | 1 |
| 7 | 1 | 0 | 0 | 0 |
Где А ~ IN3
B ~ IN4
A ~ IN1 B ~ IN2
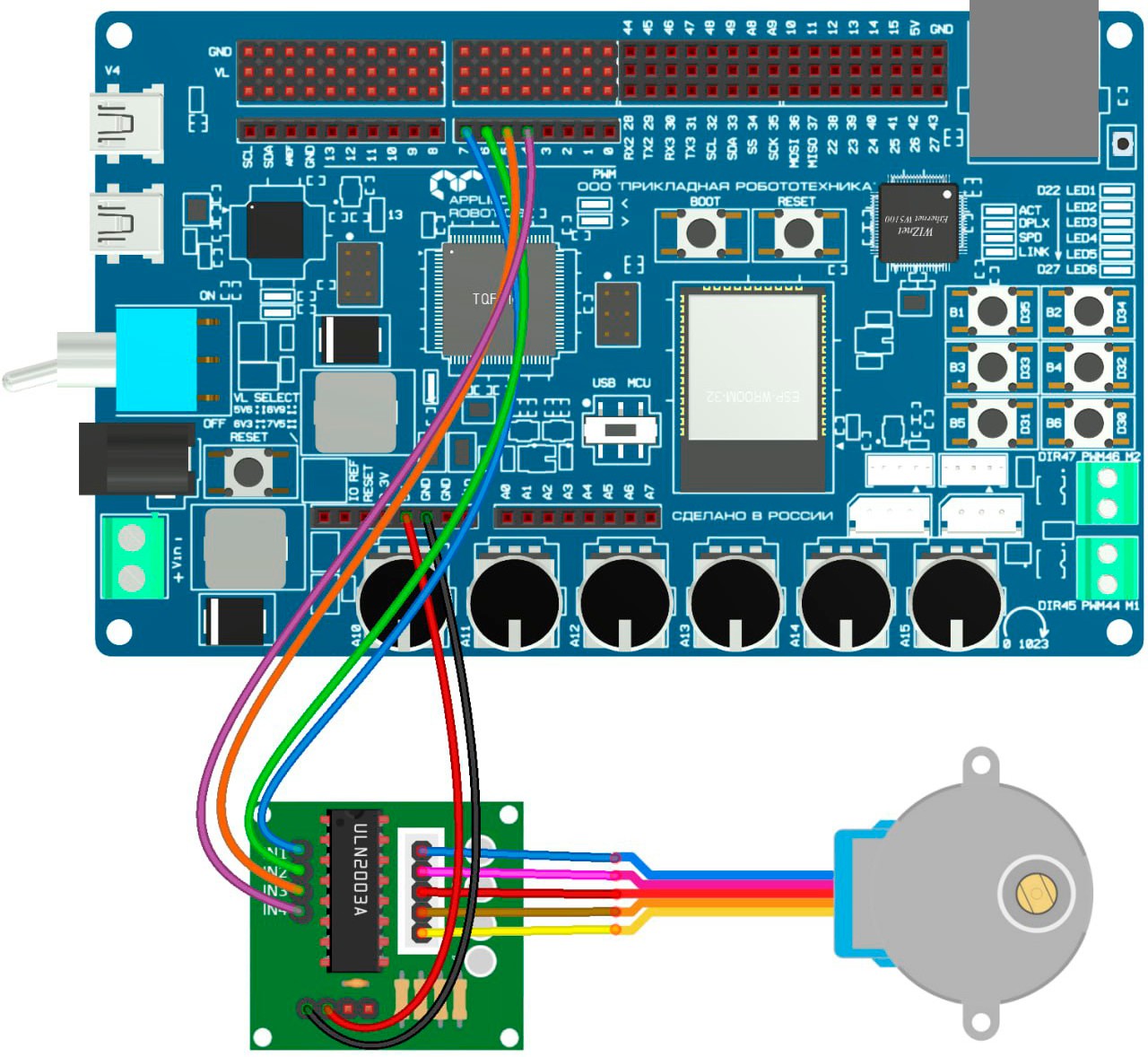 Рисунок 16.9. Схема подключения
Рисунок 16.9. Схема подключения
После сборки схема имеет следующий вид (Рисунок 16.10):
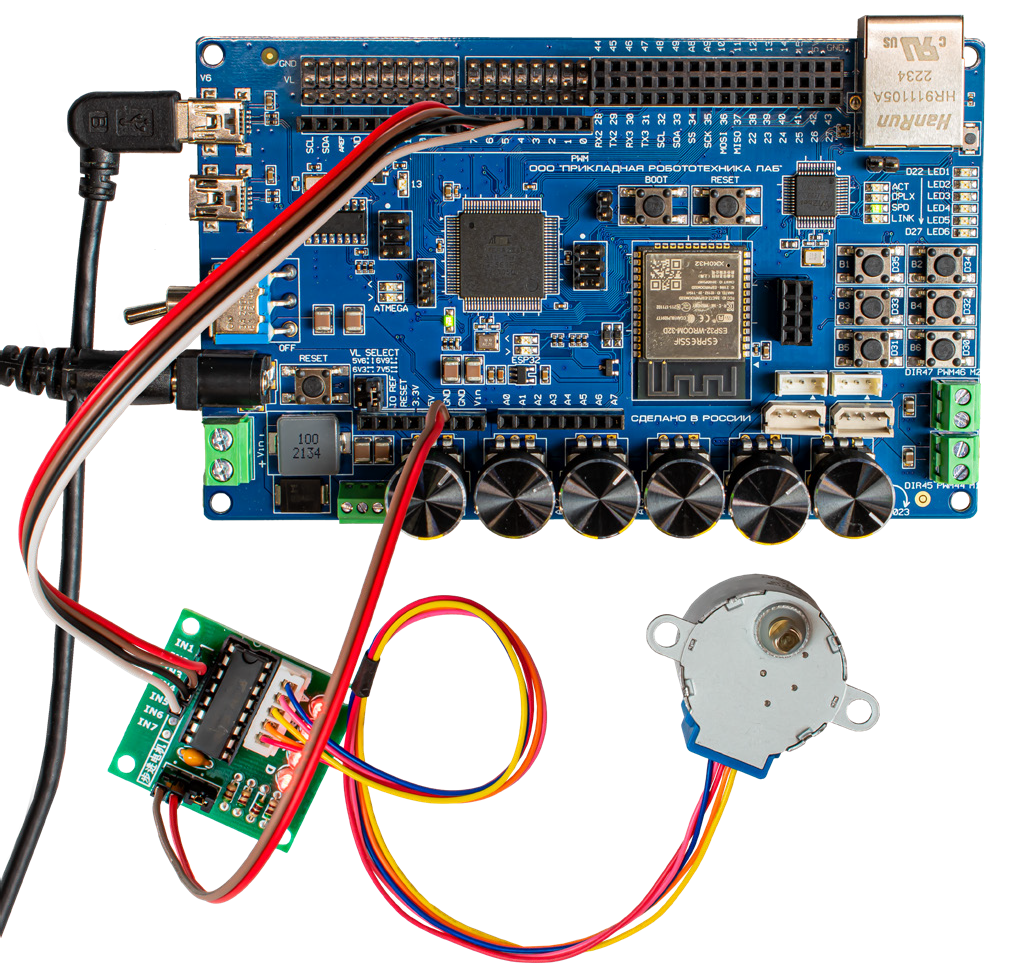 Рисунок 16.10. Схема микрошагового управления
Рисунок 16.10. Схема микрошагового управления
Рабочая программа:
// Указание подключенных цифровых входов.
int in1 = 7;
int in2 = 6;
int in3 = 5;
int in4 = 4;
// Указывание задержки, чем больше она будет,
// тем медленнее будет происходить вращение.
const int dl = 4;
void setup() {
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
// Подача напряжения согласно таблице.
digitalWrite( in1, LOW );
digitalWrite( in2, LOW );
digitalWrite( in3, HIGH );
digitalWrite( in4, HIGH );
delay(dl);
digitalWrite( in1, LOW );
digitalWrite( in2, LOW );
digitalWrite( in3, HIGH );
digitalWrite( in4, LOW );
delay(dl);
digitalWrite( in1, LOW );
digitalWrite( in2, HIGH );
digitalWrite( in3, HIGH );
digitalWrite( in4, LOW );
delay(dl);
digitalWrite( in1, HIGH );
digitalWrite( in2, HIGH );
digitalWrite( in3, LOW );
digitalWrite( in4, LOW );
delay(dl);
digitalWrite( in1, HIGH );
digitalWrite( in2, LOW );
digitalWrite( in3, LOW );
digitalWrite( in4, LOW );
delay(dl);
digitalWrite( in1, HIGH );
digitalWrite( in2, LOW );
digitalWrite( in3, LOW );
digitalWrite( in4, HIGH );
delay(dl);
digitalWrite( in1, LOW );
digitalWrite( in2, LOW );
digitalWrite( in3, LOW );
digitalWrite( in4, HIGH );
delay(dl);
}
Список контрольных вопросов:
- Определение шагового двигателя.
- Где применяются шаговые двигатели?
- В чём преимущества и недостатки по сравнению с серводвигателями у шаговых?
- На какие типы разделяют двигатели по типу ротора?
- На какие типы разделяют двигатели по типу электромагнитов?
- Какие существуют типы управления шаговыми двигателя?
- Чем характеризуются STEP/DIR драйверы?
- Какие типы сигналов используются в STEP/DIR драйверах?
- Какая функция у сигнала типа Enable?
- Какой алгоритм управления шаговым двигателем обеспечивает наи- более точное управление?
Center-nav