Лабораторная работа 17. двигатели постоянного тока
Цель работы:
Знакомство с работой мобильной платформы дифференциального типа, драйверов приводов постоянного тока, H-моста на Arduino.
Теоретическая часть
Для управления двигателями робота необходимо устройство, которое бы преобразовывало управляющие сигналы малой мощности в токи, достаточные для управления моторами. Такое устройство называют драйвером двигателей.
Существует достаточно много различных схем для управления электродвигателями. Они различаются как мощностью, так и элементной базой, на основе которой они выполнены.
Модуль «Драйвер двигателя постоянного тока (2 канала)» по сути, представляет собой сдвоенный модуль «Драйвер двигателя постоянного тока», способный реализовать систему управления одновременно двумя двигателями постоянного тока. Данный модуль (Рисунок 17.1), аналогично одноканальному, способен реализовывать систему управления, на основании данных от встроенных энкодеров, а так же позволяет выбирать источник питания двигателей.
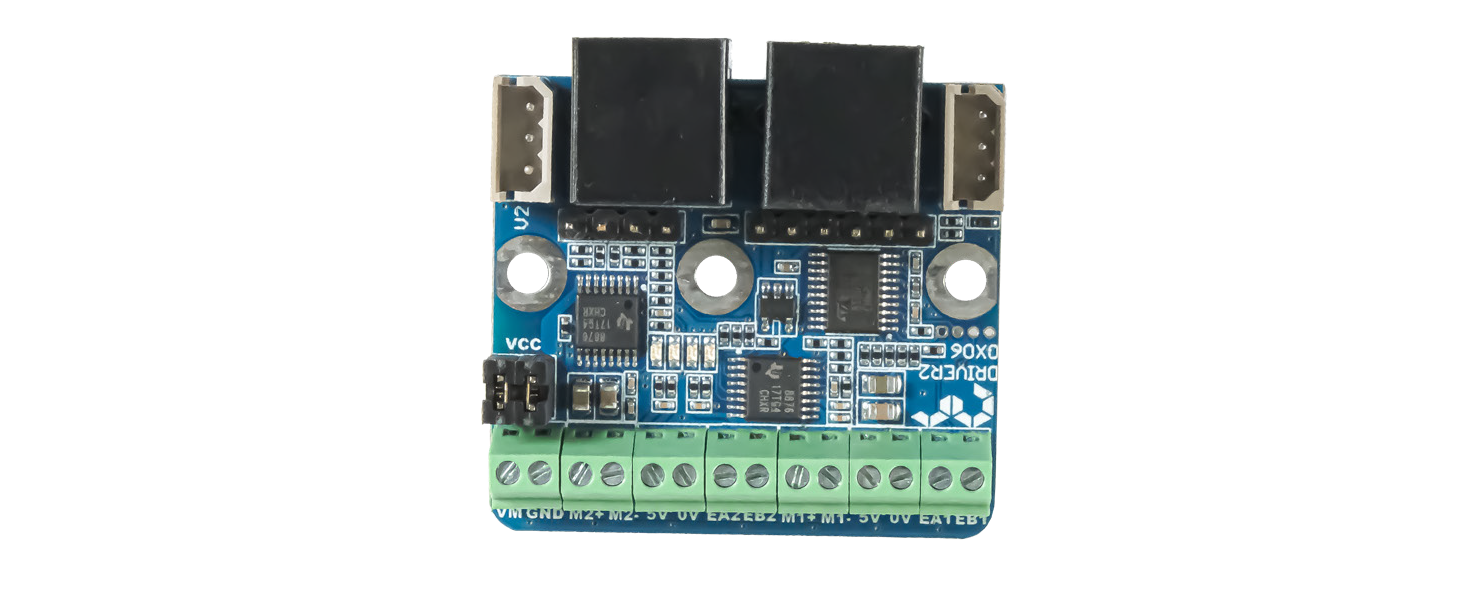 Рисунок 17.1. Модуль «Драйвер двигателя постоянного тока (2 канала)
Рисунок 17.1. Модуль «Драйвер двигателя постоянного тока (2 канала)
Модуль «Драйвер двигателя постоянного тока (2 канала) реализует классический H-мост. H-мост служит для управления скоростью и на- правлением вращения коллекторных моторов в компактных проектах. Термин «H-мост» появился благодаря графическому изображению этой схемы, напоминающему букву «Н» (Рисунок 17.2). H-мост состоит из 4 ключей.
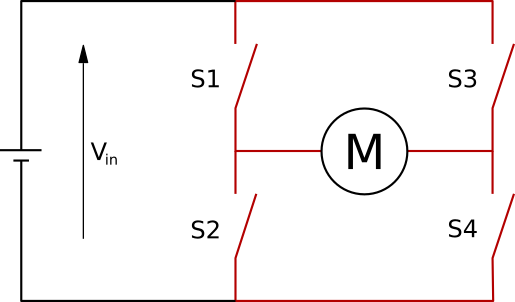 Рисунок 17.2. Схема H - моста
Рисунок 17.2. Схема H - моста
В зависимости от текущего состояния ключей, возможно разное со- стояние мотора:
| S1 | S2 | S3 | S4 | Результат |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | Мотор крутится вправо |
| 0 | 1 | 1 | 0 | Мотор крутится влево |
| 0 | 0 | 0 | 0 | Свободное вращение мотора |
| 0 | 1 | 0 | 1 | Мотор тормозится |
| 1 | 0 | 1 | 0 | Мотор тормозится |
| 1 | 1 | 0 | 0 | Короткое замыкание источника питания |
| 0 | 0 | 1 | 1 | Короткое замыкание источника питания |
Практическая часть.
В данной работе необходимо разработать программу, которая будет управлять двумя двигателями.
Контроллер КПМИС имеет два встроенных драйвера для двигателей, поэтому нам не требуется дополнительная плата расширения. Для работы моторов на полную мощность необходимо подключить внешнее питание к плате.
Схема подключения:
В данном проекте используется следующая схема подключения (Ри- сунок 17.3). Для реализации проекта потребуются следующие компоненты: DC-мотор (2 шт), питание для платы и провода.
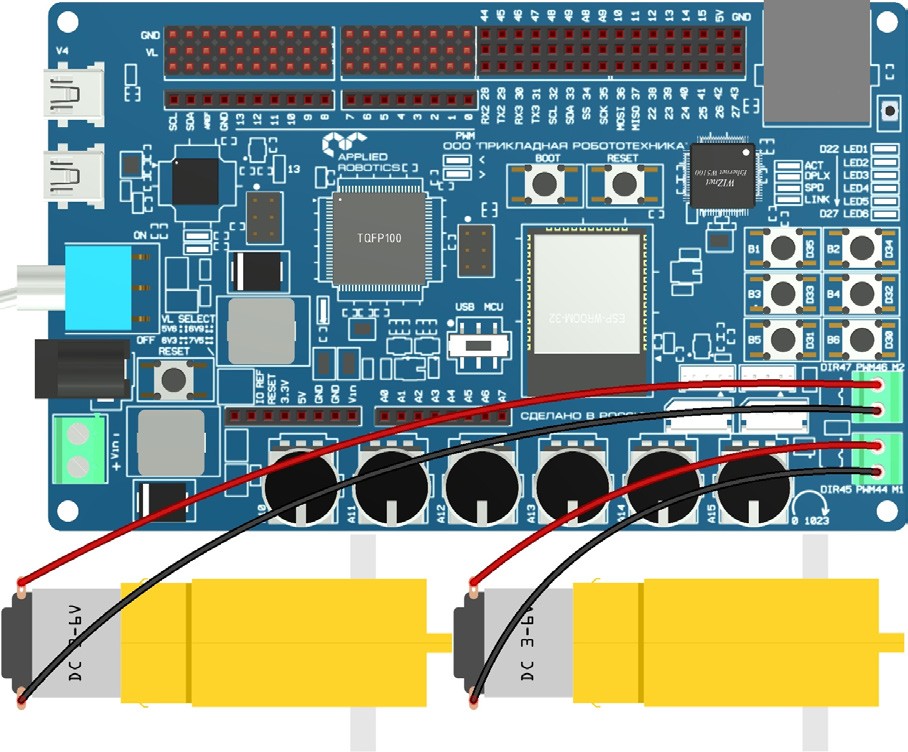 Рисунок 17.3. Схема подключения
Рисунок 17.3. Схема подключения
После сборки схема имеет следующий вид (Рисунок 17.4):
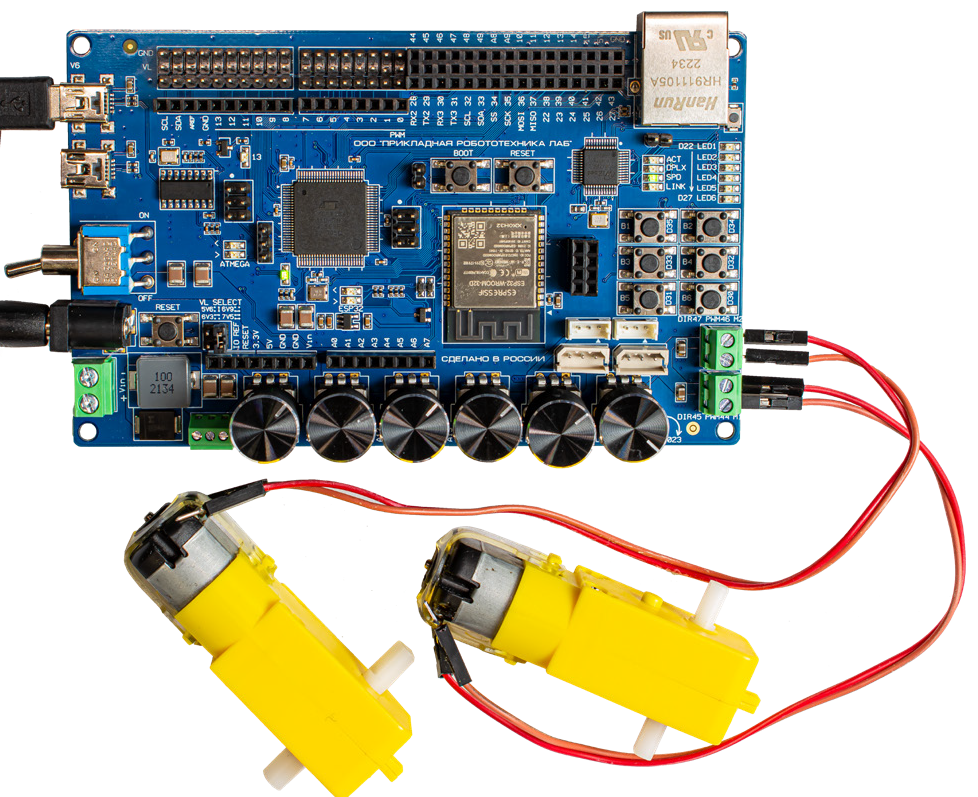 Рисунок 17.4. Подключение моторов к контроллеру КПМИС
Рисунок 17.4. Подключение моторов к контроллеру КПМИС
Схема подключения:
В данном проекте используется следующая схема подключения (Ри- сунок 17.3). Для реализации проекта потребуются следующие компоненты: DC-мотор (2 шт), питание для платы и провода.
Рабочая программа:
// M1_Speed управляет скоростью вращения первого двигателя.
// M1_dir управляет направлением вращения первого двигателя.
// M2_Speed и M2_dir – скоростью и направлением вращения
// второго двигателя, соответственно.
#define M1_dir 45
#define M1_Speed 44
#define M2_dir 47
#define M2_Speed 46
void setup() {
// Объявление пинов, работающих на выход.
pinMode(M1_dir, OUTPUT);
pinMode(M1_Speed, OUTPUT);
pinMode(M2_dir, OUTPUT);
pinMode(M2_Speed, OUTPUT);
}
void loop() {
// Установка направления движения первого двигателя.
digitalWrite(M1_dir, LOW);
// Установка скорости движения первого двигателя.
analogWrite(M1_Speed, 150);
// Установка направления движения второго двигателя.
digitalWrite(M2_dir, LOW);
// Установка скорости движения второго двигателя.
analogWrite(M2_Speed, 150);
// Остановка на 2 с.
delay(2000);
// Установка противоположного направления движения первого
// двигателя.
digitalWrite(M1_dir, HIGH);
analogWrite(M1_Speed, 150);
// Установка противоположного направления движения второго
// двигателя.
digitalWrite(M2_dir, HIGH);
analogWrite(M2_Speed, 150);
delay(2000);
// Скорость вращения обоих двигателей равна нулю.
analogWrite(M1_Speed, 0);
analogWrite(M2_Speed, 0);
}
Список контрольных вопросов:
- Для чего нужен Motor Shield?
- На каком напряжении работают двигатели постоянного тока при под- ключении к Motor Shield?
- Какие еще механизмы можно реализовать с помощью Motor Shield
- Как работает H-мост?
- На какой микросхеме реализована работа платы Motor Shield?
Список дополнительных задач:
- Реализовать более сложное движение двигателей, изменив програм- му.
- Изменить программу таким образом, чтобы можно было отслеживать скорость вращения двигателей на экране монитора.
Center-nav