Модуль технического зрения TrackingCam v3 поставляется с уже загруженным образом операционной системы и готовым к работе, однако, в связи с тем, что постоянно происходит программная доработка данного модуля – исправляются ошибки, добавляется новый функционал, улучшаются алгоритмы распознавания – рекомендуется иногда выполнять обновление модуля, а в случае поломки системы – переустановить образ системы. Рассмотрим в этой главе способы установки образа с нуля, а также обновления программного обеспечения модуля.
Загрузка образа ОС в TrackingCam v3
Модуль TrackingCam v3 поставляется с предустановленным образом. В этом можно убедиться следующим образом: если при подключении модуля к компьютеру, либо подключении его к источнику питания, мигает зеленый и горит красный светодиоды, то это значит, что на модуль TrackingСam v3 уже установлен образ, он корректно загружается, и можно пропустить первый пункт данной главы.
Если же при подключении модуля к ПК через USB-mini кабель и попытке открытия интерфейса настройки с помощью веб-браузера по ссылке
«trackingcam3.local», не открывается сервис motorcortex, либо не происходит никакой индикации на модуле, то необходимо выполнить загрузку, либо перезагрузку образа на модуль TrackingCam v3 самостоятельно. Для этого необходимо:
- получить файл образа от разработчиков, скачав его, либо с репозитория github, либо получив файл по запросу через связь с технической поддержкой производителя;
- используя полученный файл образа, подготовить загрузочную карту памяти типа microSD объёмом от 8 до 16 Гб следующим образом:
Для пользователей Linux:
Перепрошить карту памяти командой:
zcat robo-image-flasher-trackingcam3-20200513233700.rootfs.sdlittle.gz| sudo dd of=/dev/sdd bs=1M status=progress
где «robo-image-flasher-trackingcam3-20200513233700.rootfs.sdlittle. gz» – наименование файла образа. Важно не перепутать адрес microSD карты, в нашем случае это: /dev/sdd.
После того как команда будет выполнена, нужно переподключить microSD карту к ПК. Если все предыдущие шаги были выполнены правильно, карта памяти будет называться Robolinux. Заходим в корневую папку флешки «flasher» и копируем в нее нужный нам файл образа.
Загрузочная флешка будет готова, как только архив будет скопирован до конца. Далее вставляем microSD карту в модуль TrackingCam v3 и подключаем его к ПК через USB-mini. Если загрузочный образ был установлен неправильно, то будет гореть красный светодиод. Если же загрузочный образ был установлен верно, то светодиоды на модуле будут мигать в следующей последовательности:
- Зеленый и красный светодиод мигают;
- Зеленый и красный светодиод непрерывно горят;
- Горит только зеленый.
После того как все три пункта будут выполнены, образ будет установлен. Далее отключаем модуль TrackingCam v3 от ПК и вытаскиваем microSD карту. После повторного подключения модуля технического зрения к ПК, на нем должен гореть красный и мигать зеленый светодиоды.
Для пользователей Windows:
Для прошивки модуля TrackingCam v3 необходима одна microSD карта и программа BalenaEtcher (https://www.balena.io/etcher/). Нужно запустить программу BalenaEtcher и вставить microSD карту в компьютер:
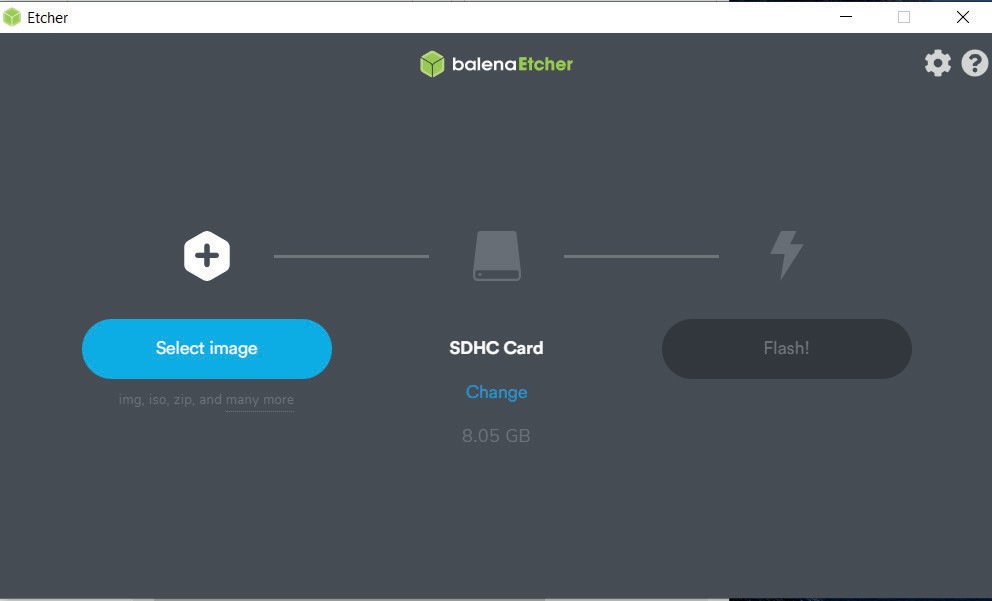 Рис. 3.1. Программа для записи образа
Рис. 3.1. Программа для записи образа
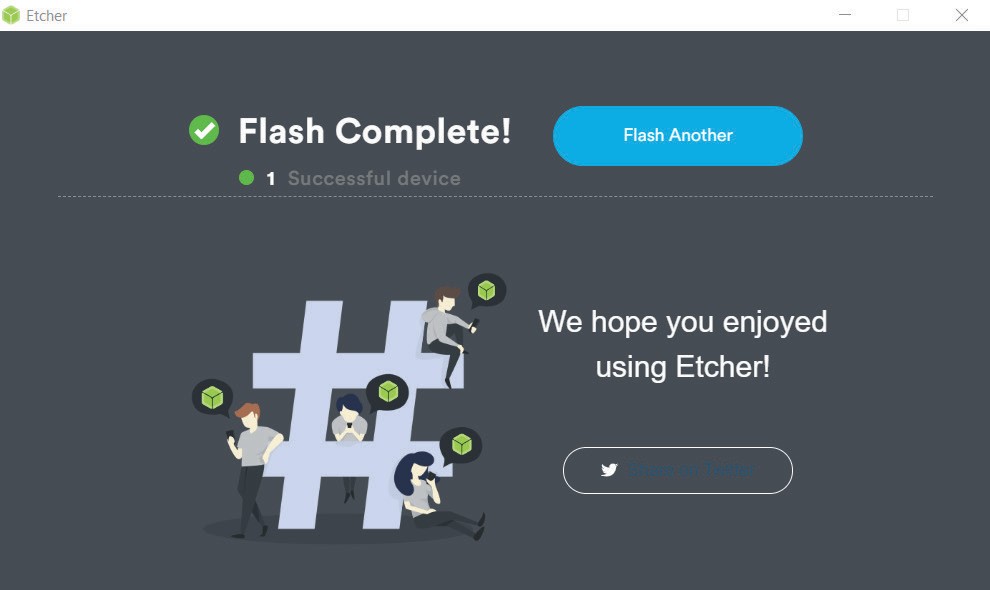 Рис. 3.2. Окончание загрузки образа на карту памяти
Рис. 3.2. Окончание загрузки образа на карту памяти
После загрузки образа на microSD карту, ее нужно вставить в модуль TrackingCam v3. Подключаем модуль технического зрения к ПК через USB-mini. Если загрузочный образ был установлен неправильно, то будет гореть красный светодиод. Если же загрузочный образ был установлен верно, то светодиоды на модуле будут мигать в следующей последова- тельности:
- Зеленый и красный светодиод мигают;
- Зеленый и красный светодиод непрерывно горят;
- Горит только зеленый.
После того как все три пункта будут выполнены, образ будет установлен. Затем нужно отключить модуль TrackingCam v3 от ПК и вытащить из него microSD карту. После повторного подключения модуля технического зрения к ПК, на нем должен гореть красный и мигать зеленый светодиоды.
Обновление ПО модуля TrackingCam v3
Для обновления встроенного программного обеспечения модуля TrackingCam v3 имеется специальный функционал. Для его применения необходимо войти в окно администрирования модуля. Это можно сде- лать, введя в адресной строке браузера: http://trackingcam3.local:9999 . После чего откроется окно ввода логина и пароля (Рис. 3.3).
Логин – root Пароль – 12345
После ввода данных необходимо нажать кнопку «Войти», и откроется окно обзора системы модуля технического зрения TrackingCam v3 (Рис. 3.4)
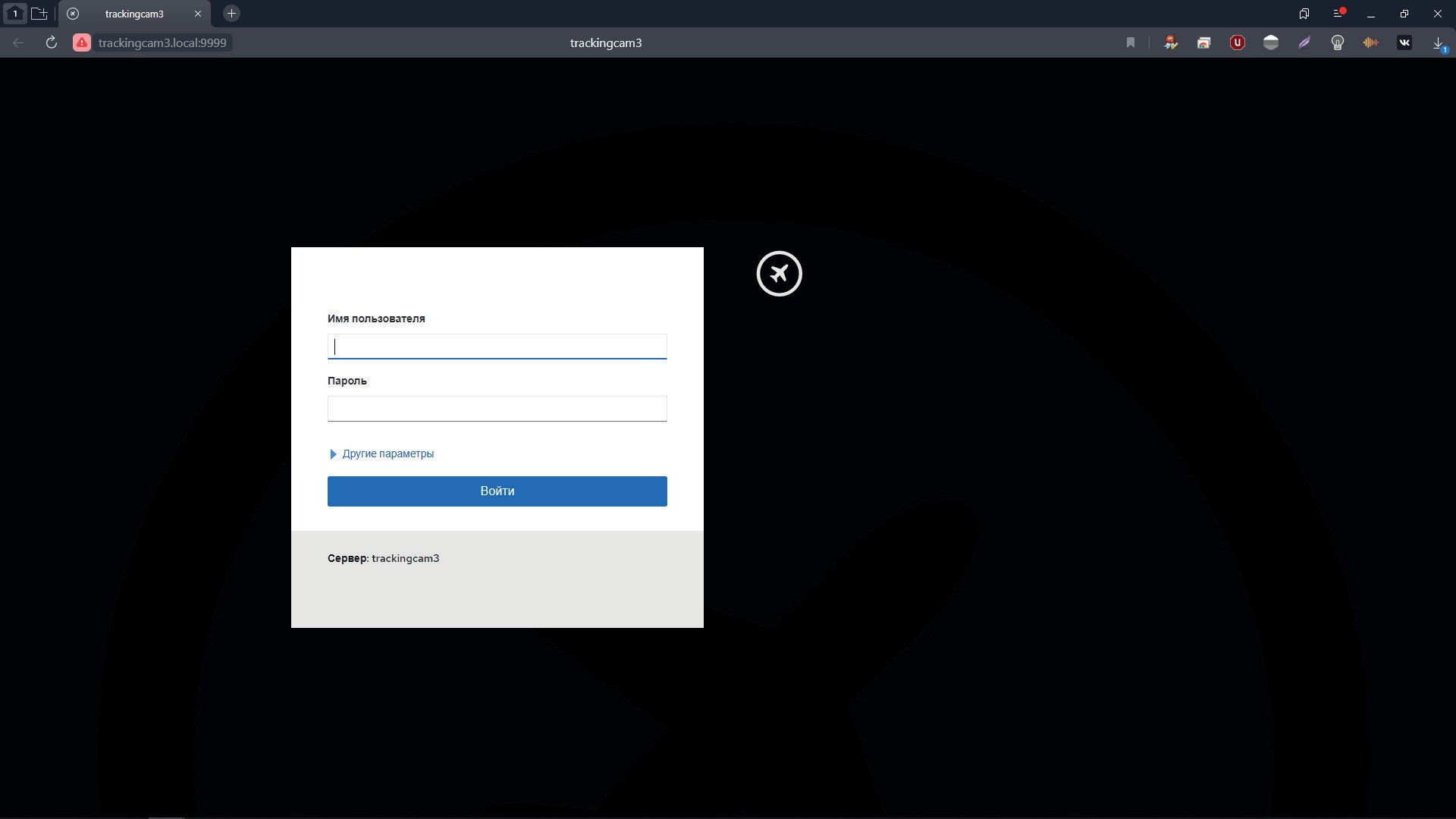 Рис. 3.3. Окно ввода логина и пароля для доступа к системе
Рис. 3.3. Окно ввода логина и пароля для доступа к системе
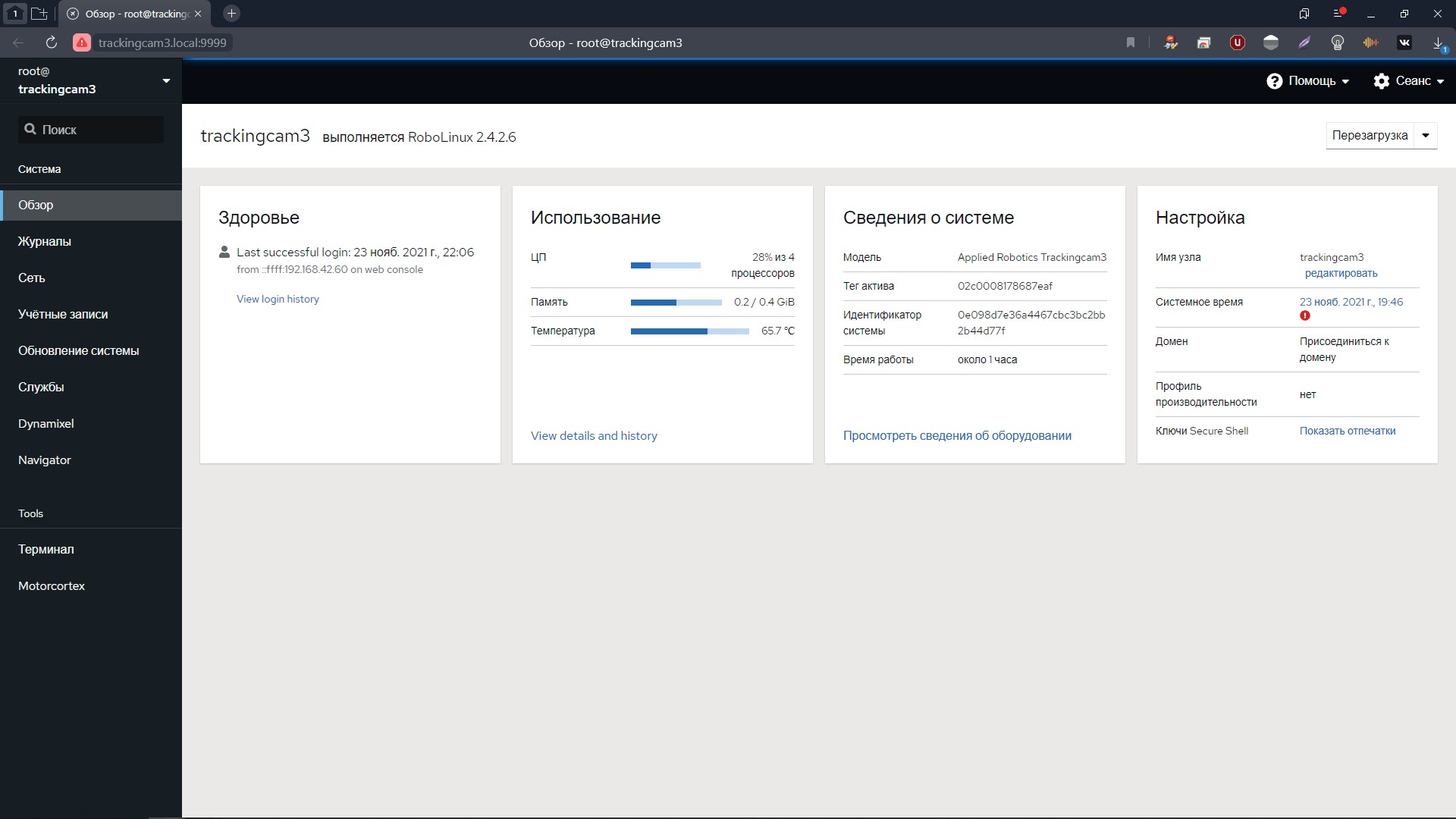 Рис. 3.4. Обзор системы модуля TrackingCam v3
Рис. 3.4. Обзор системы модуля TrackingCam v3
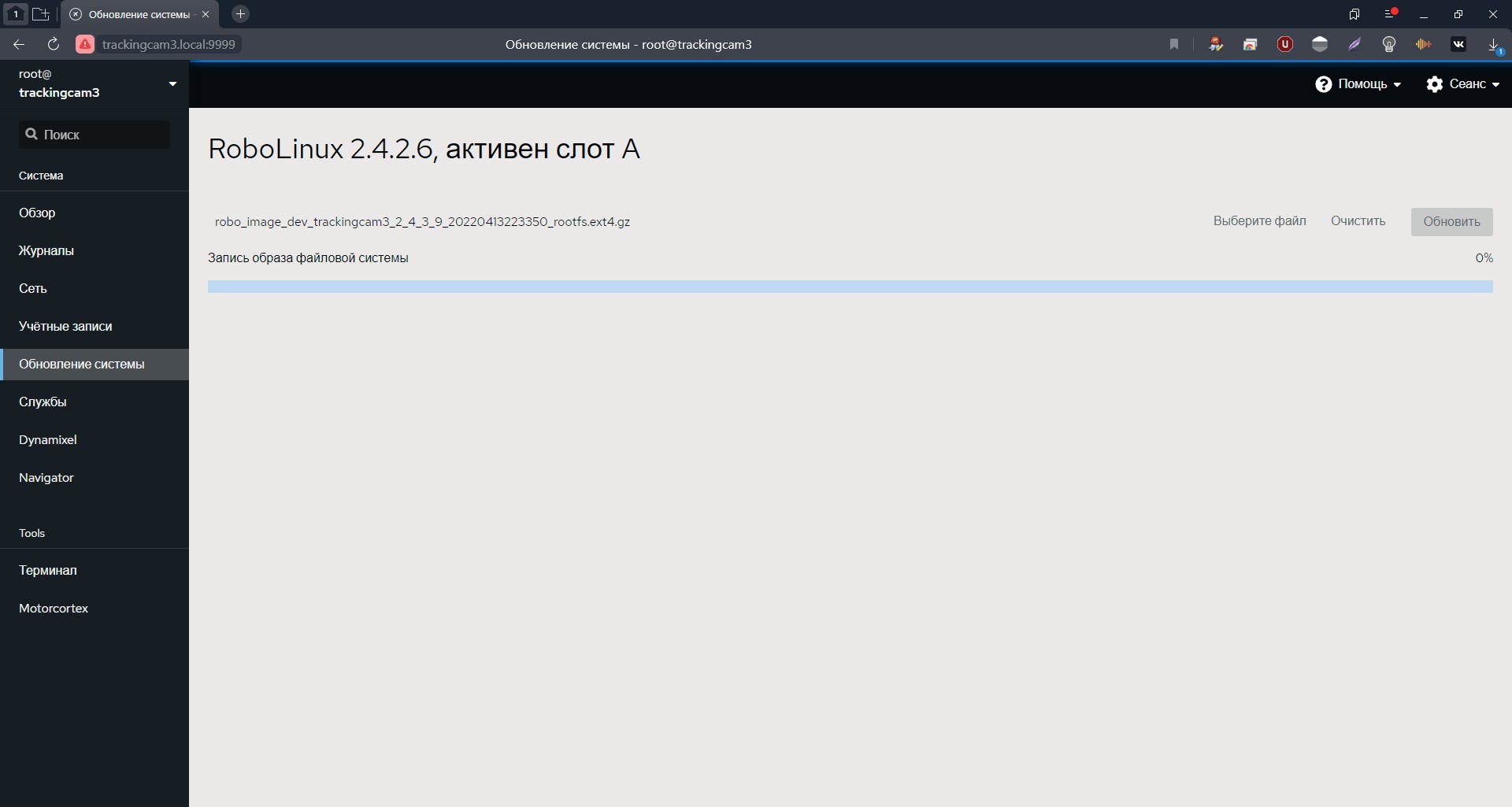 Рис. 3.5. Процесс обновления модуля TrackingCam v3
Рис. 3.5. Процесс обновления модуля TrackingCam v3
По завершении обновления модуля, он перезагрузится.
Первоначальные настройки модуля TrackingCam v3
Как уже было сказано ранее, модуль TrackingCam v3 поставляется с установленным программным обеспечением и готовым к работе. По умолчанию, настройки модуля следующие:
ID (уникальный номер) для включения в цепь с Dynamixel-совместимыми устройствами – 1
Скорость обмена данными по интерфейсу Dynamixel - 1000000 Данные настройки можно изменить, однако, необходимо быть аккуратными в этом процессе. Для изменения вышеупомянутых настроек нужно:
- Перейдя по адресу http://trackingcam3.local:9999 и используя связку логин/пароль: root/12345, зайти в окно администрирования модуля (Рис. 3.4)
- Перейти во вкладу «Службы», выбрать «mcx-tracking-cam» и нажать на ползунок «Остановить и отключить» (Рис. 3.6). Спустя несколько секунд индикатор состояния изменит свое значение на «Остановлено».
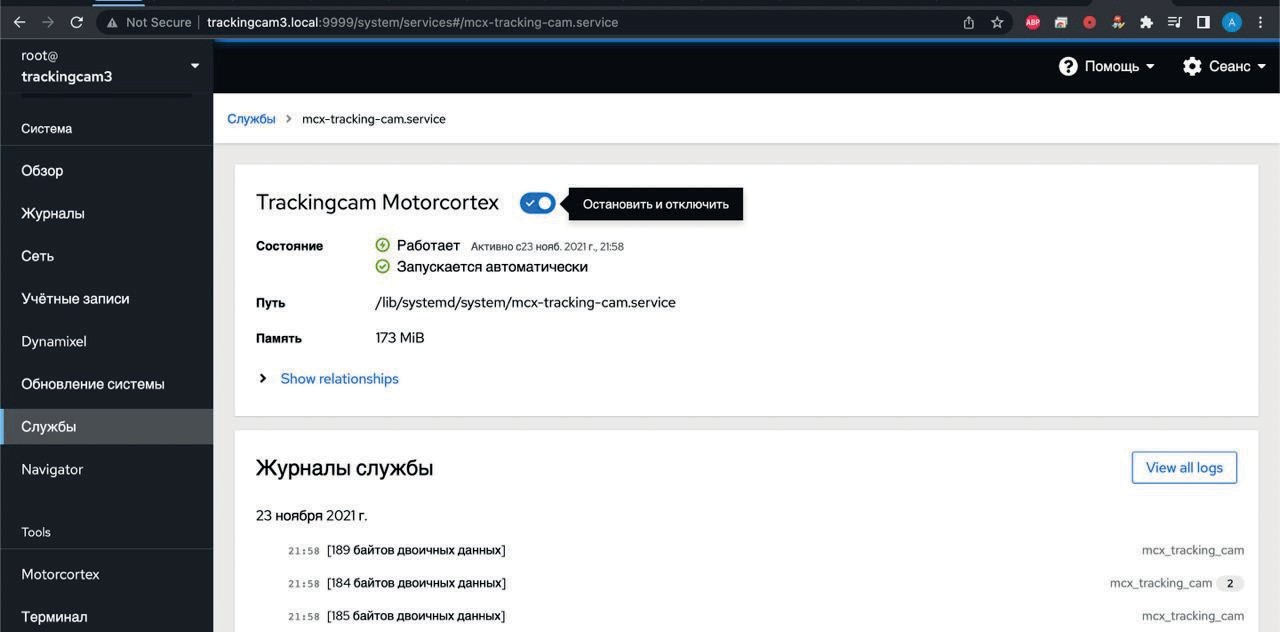 Рис. 3.6. Процесс обновления модуля TrackingCam v3
Рис. 3.6. Процесс обновления модуля TrackingCam v3
- После остановки службы необходимо перейти во вкладку Navigator, где необходимо открыть файл по следующему пути: /usr/share/mcx_ tracking_cam/config/register.json (Рис. 3.7)
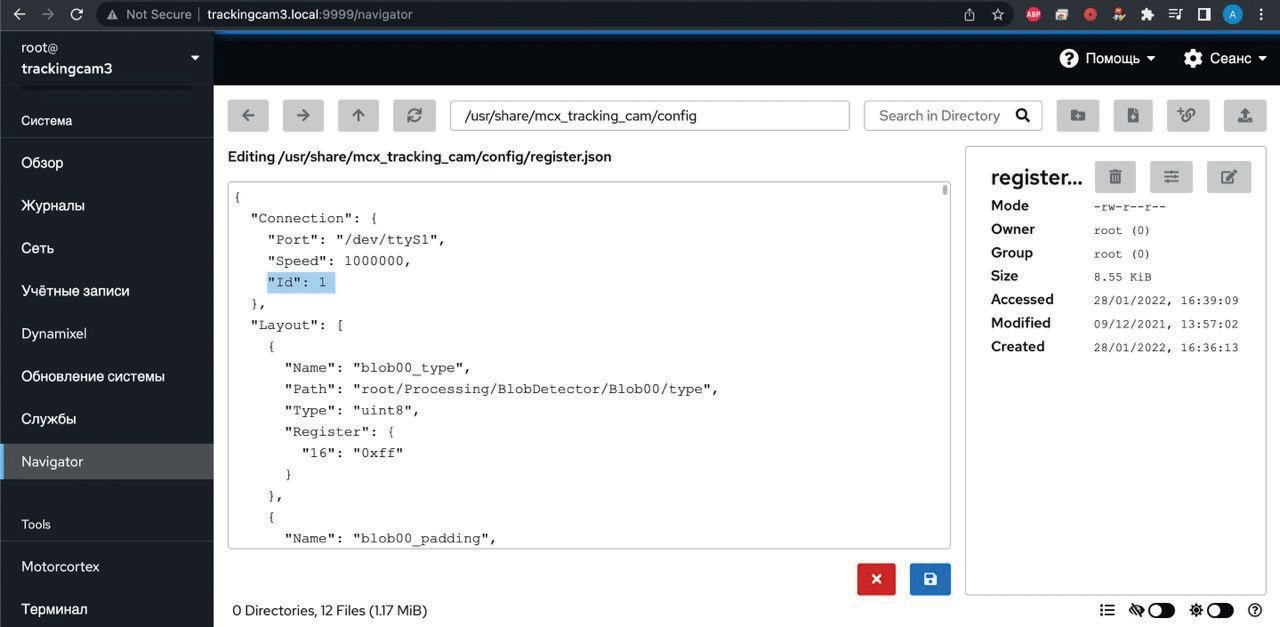 Рис. 3.7. Редактирование файла «register.json»
Рис. 3.7. Редактирование файла «register.json»
Внутри файла в блоке «Connection» можно изменить скорость обмена данными («Speed») по интерфейсу 1-wire TTL, а также ID модуля («Id»). После внесения изменений необходимо сохранить файл и заново запустить остановленную ранее службу.
Беспроводной доступ к модулю TrackingCam v3
Помимо прямого подключения к модулю технического зрения с помощью USB кабеля, возможно обмениваться данными с модулем, используя беспроводной интерфейс Wi-Fi. Причем, в данном случае, модуль может выступать как в качестве источника Wi-Fi (точки доступа), так и в качестве клиента, подключаясь к уже имеющейся Wi-Fi сети.
Для настройки обмена данными по беспроводному интерфейсу не- обходимо выполнить следующие шаги:
- Зайти в окно администрирования модуля, как было показано ранее.
- Перейти во вкладку «Сеть».
- В блоке «Интерфейсы» выбрать интерфейс «wlan0» (Рис. 3.8).
 Рис. 3.8. Интерфейсы сетевого соединения модуля TrackingCam v3
Рис. 3.8. Интерфейсы сетевого соединения модуля TrackingCam v3
По умолчанию, модуль TrackingCam v3 сам поднимает Wi-Fi соединение в режиме точки доступа, с названием trackingcam3-хххххх и паролем
«12345678» (Рис. 3.9).
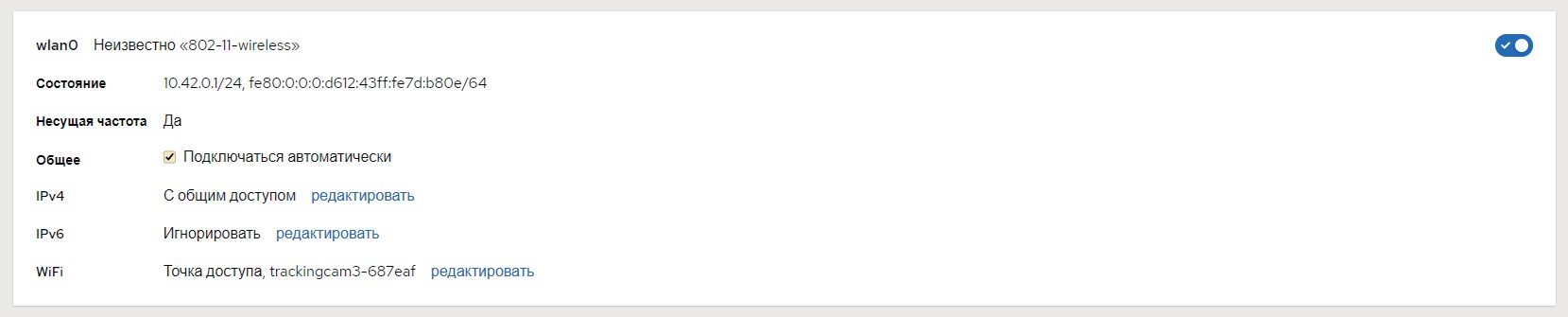 Рис. 3.9. Wi-Fi соединение, поднимаемое модулем TrackingCam v3
Рис. 3.9. Wi-Fi соединение, поднимаемое модулем TrackingCam v3
- Нажав на кнопку «Редактировать», напротив надписи WiFi, можно выбрать необходимый режим работы устройства, имя сети и задать па- роль (Рис. 3.10).
Обратите внимание! При работе с модулем TrackingCam v3 из за особенностей регистрации DNS не со всех устройств будет корректно подхватываться и применяться адреса http://trackingcam3.local:9999 и http://trackingcam3.local
В связи с этим, вместо trackingcam3.local можно использовать IP адрес, выданный модулю роутером, к которому он был подключен в ре- жиме клиента, либо использовать собственный IP адрес модуля, который он создал, будучи точкой доступа.
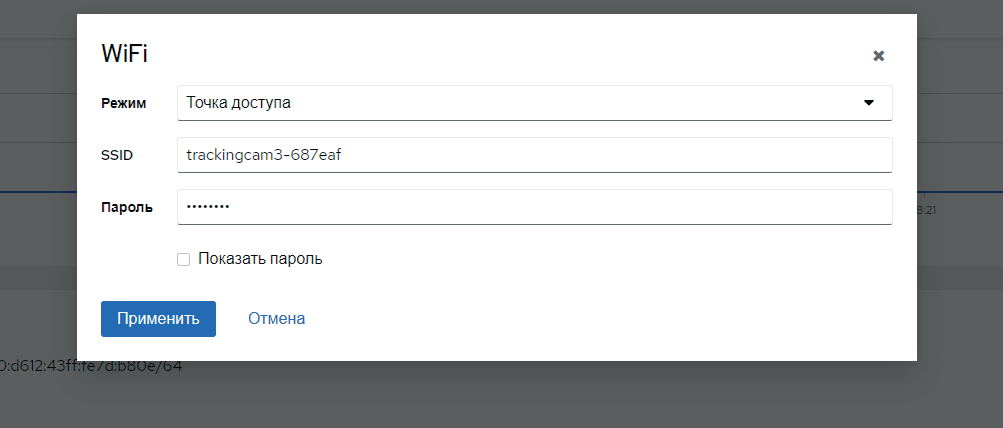
Рис. 3.10. Настройка WiFi
Center-nav