Глава 2. Основные понятия и принципы работы квадрокоптера
Термины и определения
| Сокращение | Полное наименование |
|---|---|
| АКБ / аккумулятор / батарея | Перезаряжаемый источник тока для БПЛА. В квадрокоптерах обычно применяются Li-po (литий-полимерные) аккумуляторы. |
| Акселерометр | Датчик измерения ускорения. |
| Аппаратура / пульт | Пульт для управления квадрокоптером, работающий по радиоканалу. Для работы пульта к полетном контроллеру необходимо подключить(радио приемник). |
| Барометр | Прибор для измерения атмосферного давления. |
| БПЛА | Беспилотный летательный аппарат. |
| Взлетный вес | Общий вес квадрокоптера, включая аккумулятор, приемник, раму, кабели, моторы и другое. |
| Воздушный винт / пропеллер | Лопастной движитель, создающий при вращении тягу за счёт отбрасывания воздуха назад с некоторой дополнительной скоростью, приводимый во вращение двигателем и преобразую-щий крутящий момент двигателя в силу тяги. |
| Гироскоп | Датчик, определяющий положение в простран-стве. |
| ЗУ | Зарядное устройство. |
| Квадрокоптер | Беспилотный летательный аппарат с 4-мя винтами и электронной системой стабилизации. |
| Компасквадрокоптера | Элемент квадрокоптера для настройки геолокационных функций устройства. |
| Мультикоптер | Беспилотный летательный аппарат с электронной системой стабилизации и числом винтов, равным 3 (трикоптер), 4 (квадрокоптер), 6 (гекса-коптер), 8 (октокоптер) или более. |
| Roll (Крен) | Крен относится к вращению беспилотника вокруг его продольной оси. Это движение позво-ляет дрону наклоняться из стороны в сторону. |
| Pitch (Тангаж) | Тангаж относится к вращению беспилотника вокруг его поперечной оси. Это движение позволяет дрону наклоняться вперед или назад. |
| Yaw (Рыскание) | Рыскание относится к вращению беспилотника вокруг его вертикальной оси. Это движение позволяет дрону поворачиваться влево иливправо. |
| Throttle (Газ) | Газ - это управление скоростью вращения винтов дрона. Повышение газа увеличивает подъемную силу, а понижение - уменьшает её. |
| Полетный контроллер / ПК | Специализированная плата, спроектированная для управления. Обрабатывает сигналы от датчиков и регулирует каждый двигатель дляподдержки оптимального режима полета. |
| ПО | Программное обеспечение для платы управления мультикоптером. |
| Прошивка | Программное обеспечение, управляющее работой какого-либо устройства, например, полетного контроллера или электронного регулятораоборотов мотора (ESC). |
| Приемник (Receiver) | Устройство в квадрокоптере, принимающее сигнал с пульта управления. Передает данные вполетный контроллер для управления дроном. |
| Рама | Основа для квадрокоптера, состоит из четырех лучей (шести, если это гексакоптер и восьми, если это октокоптер) и крестовины. Обычно в качестве основного материала при ее изготов-лении используются карбон и пластик. |
| Телеметрия | Передача данных о состоянии квадрокоптераили другого аппарата на расстояние. |
| Магнитометр | Устройство для измерения характеристик маг-нитного поля и магнитных свойств материалов. |
| Мотор / Электродвигатель / Привод | Электродвигатель, который вращает винты мультикоптера. Обычно используются бескол-лекторные или коллекторные электродвигатели. |
| Ячейка АКБ | Составная часть АКБ, непосредственный источник тока. Обычно АКБ для БПЛА состоят из нескольких (2–6) ячеек, соединенных последовательно. Максимальное напряжение одной Li-po ячейки – 4.2 В; общее напряжение АКБ равно суммарному напряжению ячеек. Количество ячеек обозначается буквой S, например: 2S, 3S,4S. |
| ARM | Режим Arm (постановка на охрану) не позволит контроллеру полета включить управление при определенных условиях, таких как поднятие стика Throttle или включение навигационногорежима(NavMode). |
| GPS/ГЛОНАСС | Global Position System / Глобальная навигацион-ная спутниковая система |
| FPV | FPV (First Person View (вид от первого лица)) дрон- это БПЛА, оборудованный системой передачи видеосигнала в реальном времени на борт оператора, позволяющей управлять им изнутри с использованием видеоочков или мониторов. Это позволяет пилоту иметь ощущение полета“глазами” дрона. |
| Управление | Изменение направления полета квадрокоптера. Изменение скорости вращения определенныхроторов. |
| Стабилизация | Поддержание горизонтального положения и стабилизации в полете. Дрон собирает данные с и корректирует скорости вращения роторов, чтобы избежать нежелательного вращения во-круг своих осей. |
| Регуляторы скорости | Устройства, которые управляют скоростью вращения двигателей на основе инструкций, полученных от полетного контроллера. Используются в достижении точного и мгновенногоизменения силы тяги каждого ротора. |
Основы управления
Квадрокоптеры представляют собой частный случай мультикоптеров, многороторных устройств, управляемых и перемещающихся только благодаря несущим пропеллерам. Они широко используются в различных областях, от развлечений до промышленности, благодаря своей маневренности и удобству использования.
Устройство квадрокоптера
Классический квадрокоптер имеет крестообразную раму (Рис. 2.1), на концах которой вертикально закреплены моторы. Четыре пропеллера, расположенные на диагональных лучах рамы, создают суммарную вертикальную тягу, позволяя квадрокоптеру подниматься в воздух. Управление квадрокоптером осуществляется путем изменения оборотов моторов, что приводит к наклонам и поворотам дрона в воздухе.


Рис. 2.1. Устройство квадрокоптера
Если изменить обороты моторов неравномерно, то квадрокоптер отклонится от горизонтального положения и полетит в сторону отклонения. Например, при увеличении оборотов двух задних моторов, его задняя часть приподнимется, и квадрокоптер полетит вперед. За счет неравномерного изменения оборотов всех моторов квадрокоптер способен лететь в произвольном направлении.
Поддержание высоты
При наклоне квадрокоптера появляется горизонтальная составляющая вектора тяги, что приводит к потере высоты, так называемому «соскальзыванию». Для компенсации этого эффекта необходимо увеличить обороты всех моторов равномерно.
Направление движения
Направление движения квадрокоптера (Рис. 2.2) зависит от направления вращения пропеллеров и моторов. Изменение оборотов моторов с разных сторон позволяет дрону двигаться в различных направлениях.
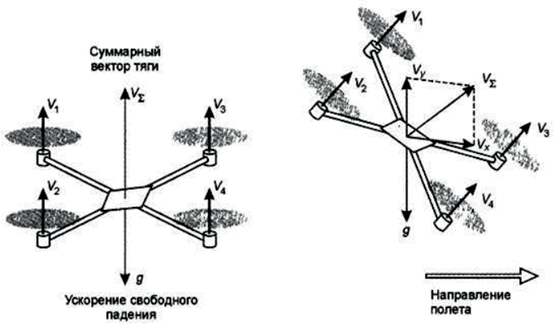
Рис. 2.2. Схемы направления движения
Вращающиеся винты создают реактивный крутящий момент, который старается развернуть квадрокоптер в сторону, противоположную вращению винта. Поэтому в квадрокоптере два винта вращаются по часовой стрелке и два против часовой стрелки, взаимно уравновешивая реактивные моменты. Если увеличить обороты моторов, вращающихся по часовой стрелке, и в равной мере уменьшить обороты у вращающихся против часовой стрелки, то суммарная вертикальная тяга не изменится, однако реактивный момент раскомпенсируется, и рама начнет поворачиваться против часовой стрелки. Аналогично, можно заставить квадрокоптер поворачиваться по часовой стрелке.
Угловые отклонения по осям следовало бы называть «тангаж», «крен» и «рыскание» (Рис. 2.3), но на практике прижились англоязычные термины, которые читателю следует запомнить:
Pitch (Наклон вперед-назад): Увеличение оборотов передних или задних моторов приводит к наклону квадрокоптера вперед или назад соответственно.
Roll (Наклон вправо-влево): Увеличение оборотов моторов справа или слева вызывает наклон квадрокоптера вправо или влево соответственно.
Yaw (Вращение в горизонтальной плоскости): Неравномерное изменение оборотов моторов противоположных пар вызывает вращение квадрокоптера вокруг вертикальной оси.
Throttle (Общий газ): Управляет общей вертикальной тягой квадрокоптера, позволяя ему подниматься или опускаться.
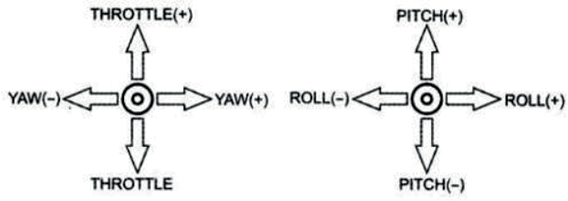
Рис. 2.3. Схема управления дроном
Направление пропеллеров для вертикального подъема
Вертикальный подъем – основное понятие, ведущее к умению управлять дронами и другими летательными аппаратами, оснащенными пропеллерами. Основа этого процесса заключается в правильной организации сил, действующих на летательный аппарат. Прежде всего силы тяжести и подъемной силы.
Пропеллеры играют главную роль в создании необходимой подъемной силы. Когда пропеллеры вращаются, они перемещают воздух вниз, создавая разность давления между верхней и нижней сторонами роторов. Эта разность давления и создает подъемную силу, которая противодействует силе тяжести и позволяет дрону подниматься в воздух.
Пропеллеры вращаются как по часовой стрелке, так и против неё. Обычно на квадрокоптере используется комбинация из обоих направлений вращения. Это необходимо для того, чтобы уравновесить крутящий момент, возникающий из-за вращения каждого из пропеллеров, что позволяет оставаться стабильным в воздухе и обеспечивает управление полетом.
Режимы полета
Зависание на месте: пропеллеры вращаются таким образом, чтобы создаваемая подъемная сила точно соответствовала силе тяжести. Этот баланс сил позволяет дрону оставаться неподвижным в воздухе на заданной высоте.
Подъем вверх: усиление мощности пропеллеров приводит к увеличению подъемной силы, которая становится больше силы тяжести. Это заставляет дрон подниматься вертикально вверх.
Вертикальный спуск: путем уменьшения мощности пропеллеров подъемная сила снижается, что позволяет дрону мягко опускаться вниз. Это управляемое уменьшение тяги необходимо для безопасного спуска летательного аппарата.
В целом, для того чтобы уверенно и успешно управлять коптерами, важно понять, как взаимодействуют направления вращения пропеллеров и создаваемой ими силы. Эти знания очень важны при управлении дронов, особенно при взлете и посадке.
Направление пропеллеров - рыскание, тангаж, крен

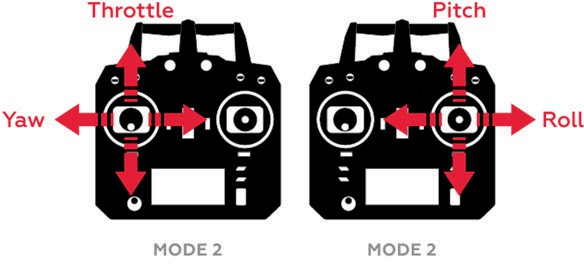
Рис. 2.4. Направление вращения пропеллеров
Существует три основных типа движения квадрокоптера: рыскание, тангаж и крен. Рассмотрим, как именно пропеллеры и двигатели влияют на каждое из этих движений (Рис. 2.4 и Рис. 2.5).
Рыскание (Yaw) – это вращение квадрокоптера вокруг своей вертикальной оси. Оно позволяет дрону поворачивать налево или направо. Управление рысканием обычно осуществляется с помощью левого джойстика пульта управления, который при перемещении влево или вправо заставляет дрон поворачиваться соответственно. Это достигается за счет изменения скорости вращения пар противолежащих пропеллеров. Например, увеличение скорости вращения пропеллеров, вращающихся по часовой стрелке, и уменьшение скорости роторов, вращающихся против часовой стрелки, приведет к повороту квадрокоптера влево.
Тангаж (Pitch) позволяет квадрокоптеру двигаться вперед или назад. Достигается наклоном дрона вперед или назад, что изменяет направление тяги от пропеллеров. Управление тангажем осуществляется через передний или задний наклон левого джойстика. Если джойстик тянуть на себя, квадрокоптер наклоняется назад и начинает двигаться назад. Когда джойстик толкают вперед, дрон наклоняется вперед, заставляя его двигаться вперед.
Крен (Roll) отвечает за движение квадрокоптера влево и вправо по горизонтали. Управление креном производится через правый джойстик пульта управления. Перемещение джойстика влево заставляет квадрокоптер наклоняться и двигаться влево, перемещение вправо – наклоняется вправо и двигаться вправо. Достигается за счет изменения скорости вращения пар пропеллеров с одной стороны дрона.
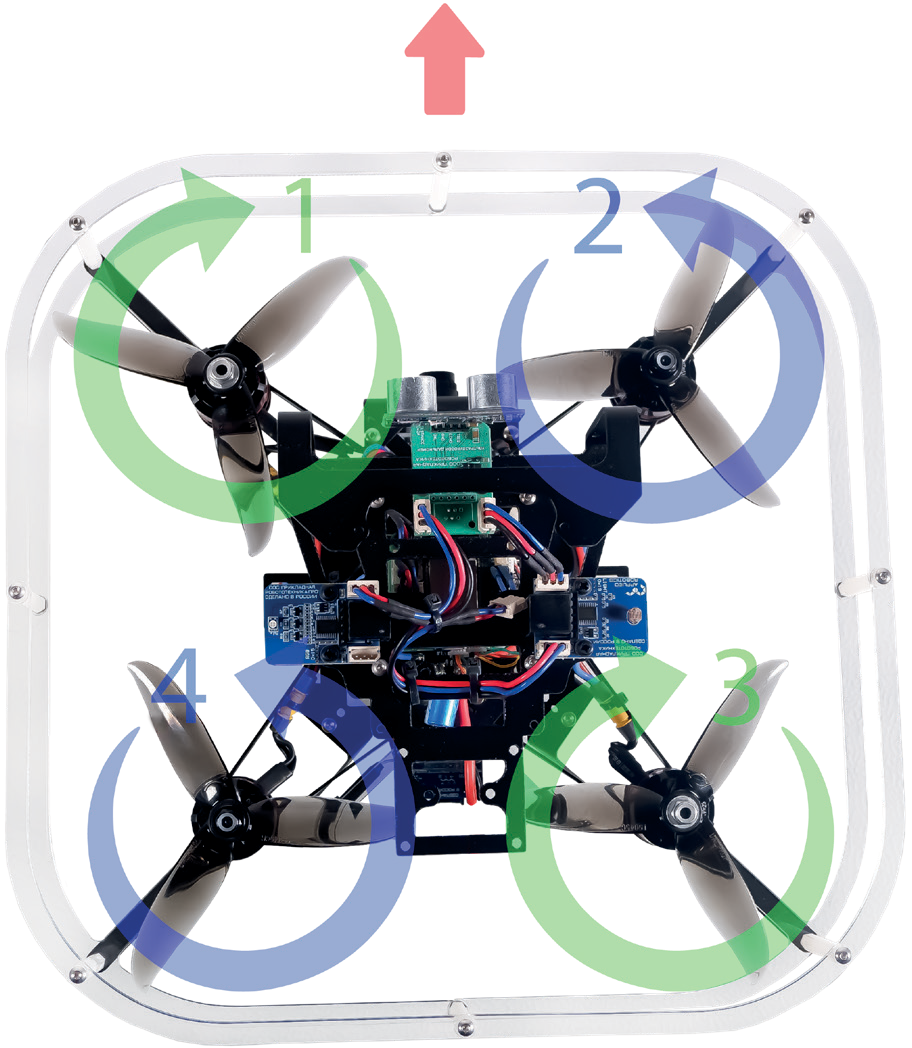
Рис. 2.5. Направление вращения двигателей
Квадрокоптеры оснащены четырьмя роторами, расположенными на одном уровне. Каждый ротор включает в себя пропеллер и двигатель, которые в совокупности создают тягу, необходимую для взлёта, полёта и маневрирования. Для обеспечения стабильности и возможности маневрирования, пропеллеры настроены на вращение в противоположных направлениях. Такая конфигурация позволяет нейтрализовать крутящий момент от каждого из двигателей, обеспечивая стабильность устройства в воздухе.
Крутящий момент, создаваемый двигателями, занимает важную роль в управлении квадрокоптером. Изменяя скорость вращения пропеллеров, можно управлять положением квадрокоптера в пространстве — поворачивать его на месте, делать боковые перемещения, или изменять высоту.
Пример управления
Чтобы повернуть дрон вправо (в направлении часовой стрелки), необходимо снизить угловую скорость двигателя 1, при этом дополнительно необходимо скомпенсировать изменение общей тяги и углового момента. Это достигается за счёт адекватного увеличения угловой скорости двигателей 2 и 4. Тем самым, сохраняя общий баланс и позволяя квадрокоптеру сохранять высоту и оставаться в равновесии.
Чтобы лететь вперед, необходимо увеличить число оборотов двигателя квадрокоптера (скорость вращения) роторов 3 и 4 (задние двигатели) и уменьшить частоту вращения роторов 1 и 2 (передние двигатели). Общая сила тяги останется равной весу, поэтому дрон останется на том же вертикальном уровне. Кроме того, поскольку один из задних роторов вращается против часовой стрелки, а другой по часовой стрелке, увеличенное вращение этих двигателей будет по-прежнему создавать нулевой угловой момент. То же самое относится и к передним роторам, поэтому дрон не вращается.
Большая сила в задней части дрона означает, что он наклонится вперед. Теперь небольшое увеличение тяги для всех роторов приведет к созданию силы тяги, которая уравновешивает вес вместе с движением вперед.
Принципы управления полётом
Полётные контроллеры квадрокоптера получают сигналы от пульта управления. Эти сигналы переводятся в команды, которые регулируют скорость каждого двигателя. Современные полётные контроллеры оснащены датчиками и алгоритмами, которые позволяют дрону автоматически адаптироваться к изменениям среды, обеспечивая стабильность даже при неблагоприятных условиях.
Существуют два способа управления квадрокоптером:
Ручное управление: В этом режиме оператор управляет дроном с помощью джойстиков на пульте, что требует навыков и практики для эффективного управления.
Автоматизированное управление: В этом режиме используются предустановленные программы полёта или GPS для автоматического выполнения заданных задач без непосредственного вмешательства оператора.
Оборотами моторов в режиме реального времени управляет специальная вычислительная система на основе достаточно быстродействующего микроконтроллера, так называемый полетный контроллер. Он постоянно опрашивает встроенные гироскопы, акселерометры, барометр, сигналы от приемника радиоуправления и на основе полученных данных рассчитывает управляющие сигналы для каждого мотора в отдельности. Радио сигналы об изменениях положений рычагов на пульте управления, посылают эти сигналы на центральный полетный контроллер. Контроллер полета передает эту информацию в регуляторы скорости каждого двигателя, которые, направляют каждый двигатель на увеличение или уменьшение скорости.
Операторы дронов должны также учитывать внешние условия, такие как ветер и температуру, поскольку они могут влиять на полетные характеристики. Применение квадрокоптеров огромно, от фотографии и видеосъемки до исследований и спасательных операций, что делает их важным инструментом во многих сферах деятельности.
Режимы полета
Режимы полета не управляют дроном. Обычно они используются для оказания помощи в пилотировании.
Режим ANGLE (STABILIZE). В данном режиме управление осуществляется через контроль угла. Таким образом, при отсутствии управления дрон всегда будет лететь ровно. При вводе значения крена или тангажа контроллер полета изменит угол наклона. Однако при максимальном изменении крена или тангажа дрон будет совершать крен или тангаж только до тех пределов, которые установлены в полетном контроллере. Автоматического регулирования высоты нет, поэтому пилоту по-прежнему необходимо контролировать это.
Режим ACRO (Rate Mode). В данном режиме управление осуществляется через контроль скорости. Таким образом, контроллер всегда будет стараться сохранять текущее положение дрона, когда пилот не управляет дроном. Полетный контроллер ограничивает скорость вращения в соответствии с ограничениями скорости, установленными в полетном контроллере.
Режимы навигации
Режим навигации предусматривает некоторую автономность в полете. В этом случае диспетчер берет на себя большую часть операций дрона. Все режимы навигации основаны на режиме углового полета.
NAV POSHOLD (Navigation Position Hold) - это режим удержания позиции в системе управления беспилотным летательным аппаратом (БПЛА) или дроном. NAV POSHOLD позволяет дрону автономно удерживать стабильную позицию, что особенно полезно для задач, требующих точности положения. Дрон автоматически корректирует свое положение и высоту, чтобы оставаться на месте, даже при воздействии внешних факторов, таких как ветер. Этот режим обеспечивает плавное и устойчивое полетное поведение дрона во время удержания позиции в воздухе.
NAV ALTHOLD (Navigation Altitude Hold) - это режим удержания высоты в системе управления беспилотным летательным аппаратом (БПЛА) или дроном. NAV ALTHOLD позволяет дрону автономно удерживать стабильную высоту над землей. Дрон автоматически корректирует свою высоту, чтобы оставаться на заданной высоте, даже при изменяющихся условиях окружающей среды или воздушных потоках. Режим NAV ALTHOLD помогает обеспечить плавное и стабильное полетное поведение дрона при удержании заданной высоты во время миссии полета.
Протоколы передачи видео
В FPV (First Person View) дронах скорость передачи изображения является критически важной для обеспечения плавного и отзывчивого управления. Задержка в передаче видео может привести к авариям и сделать управление дроном сложным. К основным протоколам относятся:
Аналоговые протоколы:
NTSC - это аббревиатура Национального комитета по телевизионным стандартам. Это аналоговая система цветного телевидения, обычно используемая в Северной Америке и некоторых странах Южной Америки. Он также доступен в азиатских странах, включая Филиппины, Тайвань и Японию. NTSC может передавать 30 кадров в секунду при соотношении сторон 720 × 480. Его приемники могут выполнять цветокоррекцию, когда цвета не совпадают, поскольку системы NTSC имеют более высокую насыщенность, что требует некоторой корректировки. Этот формат был первоначально разработан в 1953 году для совместимости со всеми телевизорами, даже если они все еще были черно-белыми.
PAL - это система цветного телевидения, используемая в основном в Европе, Австралии и некоторых частях Африки, Азии и Южной Америки. Он обеспечивает частоту кадров 25 кадров в секунду и соотношение сторон 720 × 576. В отличие от NTSC, PAL использует автоматическую коррекцию цвета путем чередования фаз цветового сигнала для устранения ошибок оттенка. Кроме того, формат автоматически устраняет фазовые ошибки цветности. Тем не менее, при экстремальных ошибках изображение получается зернистым, особенно когда схемы декодера не выровнены должным образом. PAL специально разработан для устранения некоторых недостатков NTSC, таких как стабильность сигнала в плохих погодных условиях.
SECAM - это система цветного телевидения, используемая в основном во Франции, некоторых странах Восточной Европы, Африки и Азии. Он обеспечивает частоту кадров 25 кадров в секунду и соотношение сторон 720 × 576. В отличие от NTSC и PAL, SECAM использует систему с последовательной передачей цвета. Цветовой сигнал передается последовательно с сигналом яркости, и каждый цветовой компонент (Y, R-Y, B-Y) передается по отдельности. SECAM также использует систему с памятью, которая хранит информацию о цвете предыдущего кадра. Это позволяет устранять ошибки фазы и оттенка, что приводит к более стабильному и точному воспроизведению цвета.
Цифровые протоколы:
Lightbridge - это цифровой протокол передачи видео, разработанный DJI для использования в своих FPV дронах. Он обеспечивает более высокое качество изображения и меньшую задержку, чем аналоговые протоколы. Lightbridge обеспечивает передачу видео с частотой до 30 кадров в секунду и разрешением до 1080p, что дает более четкое и детализированное изображение по сравнению с аналоговыми протоколами. Задержка составляет около 150 мс, что достаточно низко для большинства приложений FPV, однако имеет ограниченный радиус действия и восприимчив к помехам.
OcuSync- это цифровой протокол передачи видео, разработанный DJI для использования в своих FPV дронах. Он является преемником протокола Lightbridge и предлагает улучшенное качество изображения, меньшую задержку, больший радиус действия и повышенную устойчивость к помехам. OcuSync обеспечивает передачу видео с разрешением до 1080p при 60 кадрах в секунду, что дает более плавное и детализированное изображение. Задержка OcuSync составляет около 120 - это делает его более подходящим для приложений, требующих быстрого реагирования, таких как гонки на дронах. OcuSync имеет больший радиус действия и более устойчив к помехам, чем Lightbridge, что приводит к более стабильному и надежному видеосигналу.
FPV Air Unit - это протокол передачи видео с низкой задержкой, разработанный Fat Shark и FrSky для использования в FPV дронах. Задержка FPV Air Unit составляет всего 30 мс, что делает его одним из самых быстрых протоколов передачи видео для FPV дронов. Это обеспечивает пилотам почти мгновенный ответ на свои команды управления. FPV Air Unit обеспечивает передачу видео с разрешением до 720p при 120 кадрах в секунду, что дает четкое и плавное изображение. Благодаря использованию технологий MIMO и OFDM, обеспечивается надежная и стабильная видеопередача даже в сложных условиях, однако имеет небольшой радиус действия и ограниченную совместимость.
Выбор протокола передачи видео для FPV дрона зависит от следующих факторов:
Расстояние передачи: Аналоговые протоколы имеют меньший радиус действия, чем цифровые.
Качество видео: Цифровые протоколы обычно обеспечивают более высокое качество видео, чем аналоговые.
Задержка: Протоколы с малой задержкой имеют меньшую задержку между изображением, снятым дроном, и изображением, отображаемым на очках или мониторе пилота.
Стоимость: Аналоговые системы, как правило, дешевле, чем цифровые.