Глава 4. Практическая часть
Правила техники безопасности при эксплуатации квадрокоптера
Соблюдение техники безопасности при использовании FPV-дрона имеет огромное значение для обеспечения безопасности окружающих и самого оператора. Использование дронов становится все более популярным, однако несоблюдение правил и мер безопасности может привести к серьезным последствиям.
Важно помнить, что дроны могут представлять опасность при неправильном использовании. Незаконное проникновение в запретные зоны или нарушение правил авиации может привести к авариям и несчастным случаям. Нарушение частной жизни других людей, летая слишком близко к домам или людям, также может вызвать недовольство и конфликты.
Соблюдение техники безопасности при использовании FPV-дрона включает в себя знание правил и законов, проверку дрона перед каждым полетом, умение управлять им в безопасных условиях, а также использование защитного снаряжения. Все эти меры помогут избежать возможных происшествий и обеспечить безопасное использование дрона как для окружающих, так и для самого оператора.
Перед началом эксплуатации мультикоптера ознакомьтесь с действующими законодательными нормами в части порядка использования воздушного пространства, регистрации и учёта БПЛА и неукоснительно соблюдайте их;
Перед первым включением убедитесь в правильности сборки мультикоптера, отсутствии коротких замыканий и целостности проводки. Помните, что несоблюдение этого пункта может привести к пожару;
Перед каждым полётом проверяйте мультикоптер и все его детали и элементы конструкции на целостность, они не должны иметь механических повреждений;
Перед выполнением первого полёта убедитесь, что вы внимательно изучили настоящее методическое пособие, поняли все приведённые в нём указания и рекомендации и готовы их ответственно соблюдать;
Сборка и эксплуатация мультикоптера лицами, не достигшими 18-летнего возраста, должна осуществляться под присмотром компетентных и ответственных взрослых;
Запрещено обслуживание, включение и управление БПЛА в состоянии алкогольного и наркотического опьянения;
Запрещены полёты БПЛА вблизи линий электропередач, радиолокационных станций и других источников сильного электромагнитного излучения;
Запрещено присутствие свободно передвигающихся домашних животных в местах полётов БПЛА;
Полёты мультикоптеров массой до 250гр выполняются в просторных помещениях либо на открытых площадках в безветренную погоду, полёты мультикоптеров массой свыше 250 гр выполняются на открытых площадках при ветре не более 8 м/с;
При выполнении полётов в помещении необходимо наличие защитной сетки с размером ячейки менее размера мультикоптера между местом выполнения полёта и зрителями, и другими лицами. Рекомендуется использование куба с длиной стороны 3 метра;
Всегда сначала включайте передатчик системы радиоуправления, затем подключайте силовой аккумулятор мультикоптера;
Во время включения мультикоптера убедитесь, что расстояние между ним и передатчиком системы радиоуправления составляет более одного метра;
Перед проверкой работоспособности мультикоптера отойдите от него на расстояние не менее двух метров. В процессе выполнение полёта не допускайте нахождение БПЛА на расстоянии более двух метров от вас и других людей до момента выключения двигателей;
Остерегайтесь вращающихся деталей БПЛА, таких как воздушные винты. Помните, что они могут стать причиной серьёзных травм, в том числе опасных для жизни;
При полётах БПЛА визуально (без FPV-оборудования) разрешено нахождение зрителей и других лиц только за спиной оператора, в этом случае мультикоптер находится в воздухе строго перед оператором;
При полётах на дальние расстояния, в том числе в автоматическом режиме, запрещается нахождение зрителей и других лиц на траектории полёта БПЛА;
Прежде чем подходить к мультикоптеру как в случае его падения, так и после штатной посадки и брать его в руки, убедитесь, что электродвигатели выключены и их случайный запуск невозможен;
Выключайте передатчик системы радиоуправления только после выключения мультикоптера;
При эксплуатации БПЛА в первую очередь руководствуйтесь здравым смыслом и принимайте решения, адекватные ситуации.
В случае возникновения проблем, немедленно прекратите полет и вернитесь на землю.
Правила техники безопасности при хранении, транспортировке и эксплуатации аккумуляторов
В составе комплекта мультикоптера и его оборудования могут использоваться LiPo, LiIon, LiFe и LiHV аккумуляторы. Все перечисленные выше типы относятся к литиевым аккумуляторам и при неправильном обращении могут стать причиной возникновения пожара, а также серьёзных травм, в том числе опасных для жизни.
Внимание! Приступая к эксплуатации аккумуляторов из состава данного набора вы подтверждаете, что внимательно прочли все перечисленные ниже пункты, понимаете их смысл и готовы их ответственно соблюдать.
Изучите действующие законодательные нормы в части хранения и транспортировки литиевых аккумуляторов и неукоснительно соблюдайте их;
Храните аккумуляторы исключительно в ёмкостях из плотных несгораемых материалов;
В процессе хранения и транспортировки не допускайте короткого замыкания аккумуляторов. Категорически запрещён контакт аккумуляторной батареи и её силового и балансировочного разъёмов с металлическими предметами.
Утилизируйте использованные и вышедшие из строя литиевые аккумуляторы в соответствии с действующим федеральным и местным законодательством;
Перед началом эксплуатации аккумулятора проведите его осмотр. Аккумулятор, его кабели и разъёмы не должны иметь механических повреждений. Также запрещена эксплуатация аккумуляторов, имеющих вздутие или подозрительный запах. Проводите осмотр перед каждым применением аккумулятора;
Убедитесь, что ваше зарядное устройство поддерживает выбранный тип аккумулятора и используется соответствующая программа. Помните, что использование несовместимого зарядного устройства, либо неправильного алгоритма заряда, ведёт к взрыву аккумулятора и последующему пожару;
Не заряжайте аккумулятор без присмотра. В случае вздутия или нагрева аккумулятора в процессе заряда незамедлительно прервите процесс, поместите аккумулятор в огнеупорную ёмкость и утилизируйте в соответствии с действующим законодательством;
Внимательно изучите инструкции производителей ко всем используемым вами аккумуляторам и зарядным устройствам и неукоснительно соблюдайте их.
Симулятор
EduSim – это симулятор, созданный специально для обучения и исследования. Симулятор EduSim позволяет создать реальные ситуации и задачи, позволяя экспериментировать и тестировать свои навыки без необходимости использовать настоящий дрон, а лишь симулировать его полет в заданных условиях. EduSim имеет широкий набор возможностей для пользовательских тестов и экспериментов, открытый для исследования и обучения в виртуальной среде.
Системные требования
Операционная система: Windows 10 / Windows 11 (только 64-бит). Графический процессор: совместимый с DirectX 11 / OpenGL 4.5
NVIDIA GeForce GTX 1660 super или мощнее.
Свободное место на диске: 5 Гб. Процессор: core i3 6100 и выше. Оперативная память: 8 Гб.
Настройки симулятора
Главное меню содержит основной инструментарий симулятора EduSim: «Начать», «Конструктор уровней», «Настройки» и «Выход». 
Вкладка «Выход»
«Выход» завершает работу и закрывает симулятор.
Вкладка «Начать»
Переход в рабочее пространство симуляции.
Вкладка «Конструктор уровней»
В конструкторе предоставляется возможность создать собственную карту или отредактировать уже существующую. Нажав «Создание новой карты», можно создать как закрытую локацию (indoor), так и открытую (outdoor).

Вкладка «Настройки»
При переходе в «Настройки» доступны три области настроек: «Графика», Контроллер», Управление».
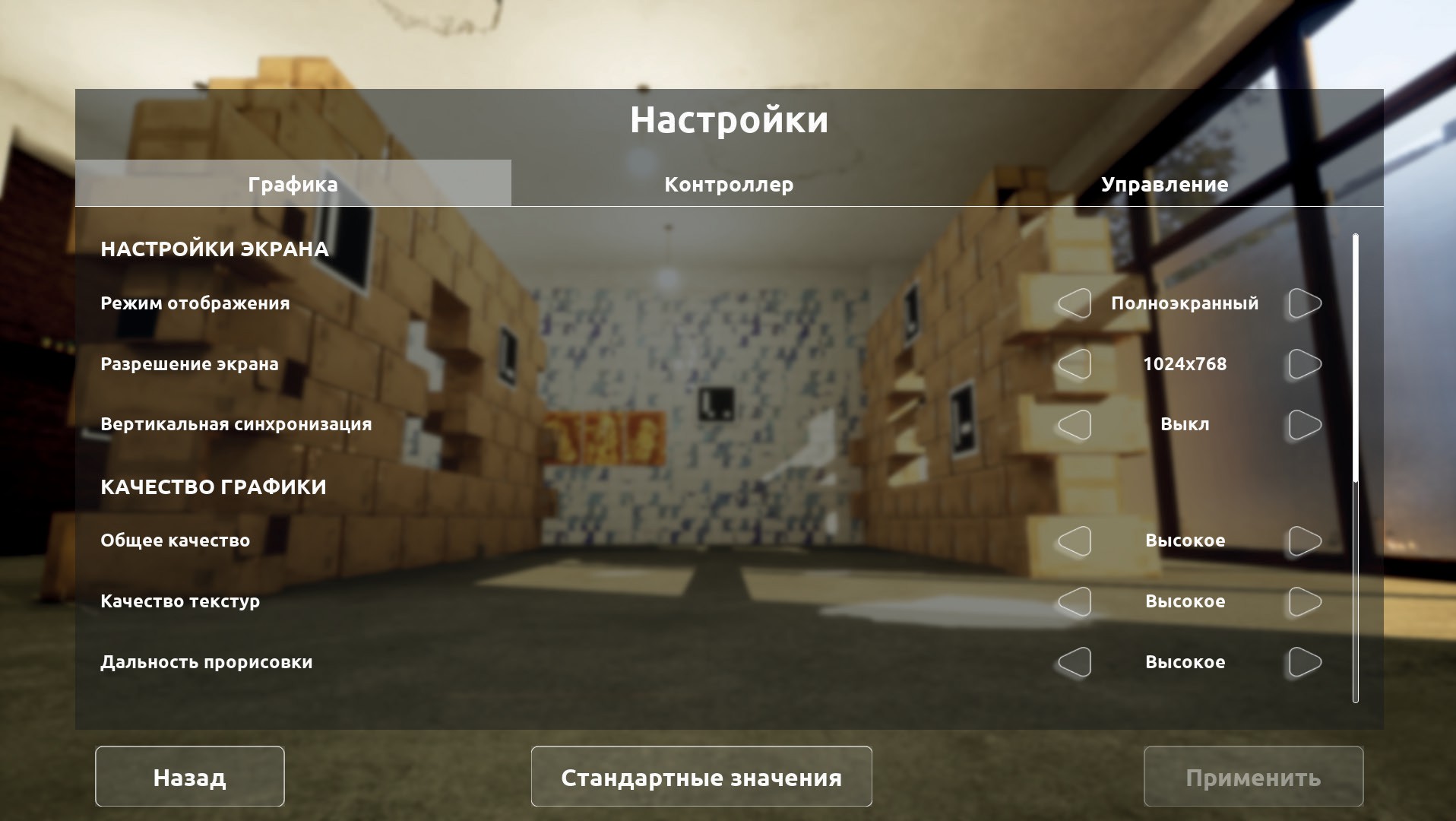
Вкладка «Графика»
Вкладка содержит следующие поля:
- Режим отображения это параметр, который определяет способ представления изображения на экране устройства. Может быть «Полноэкранным», «Оконным» и «Окно без рамки».
- Разрешение экрана - количество пикселей в строке, где первое число — их количество по горизонтали, второе — по вертикали. Может принимать значения, доступные для Вашего монитора, например: 1024x768, 1152x864, 1280x720, 1280x800, 1280x1024, 1280x960, 1366x768, 1920*1080, 1440x900, 1440x1080, 1600x900, 1600x1024, 1680x1050, 1920x1080. Чем выше разрешение, тем из большего количества пикселей состоит изображение, а значит, тем оно четче и детализированнее.
- Вертикальная синхронизация - это технология, синхронизирующая частоту обновления кадров монитора с частотой обновления кадров графического процессора. Во включенном состоянии симулятор работает плавно и без аномалии или искажения, которые могут возникать при отображении графики. В выключенном состоянии возможно присутствие тормозов или подтормаживание во время движения камеры или объектов на экране.
- Качество графики - регулирует общее качество картинки (Эпическое, Очень высокое, Высокое, Среднее и Низкое ). Чем выше качество — тем четче, реалистичнее картинка. А также с помощью параметров Качество текстур, Дальность прорисовки, Глобальное освещение, Качество теней, Качество шейдеров, Пост-обработка, Качество отражений, Качество эффектов, Качество растительности, Качество сглаживания можно задать пользовательские настройки.
Вкладка «Контроллер»
Во вкладке настроек «Контроллер» происходит поиск и настройка аппаратуры управления.

После нахождения пульта, появляется возможность откалибровать пульт в симуляторе, назначив новые стики на Roll, Pitch, Yaw, Throttle. Для этого требуется нажать на кнопку «Начать калибровку» и следовать инструкциям, описанным в симуляторе. В конце калибровки есть возможность инвертировать значение канала.
Для пультов дистанционного управления FS-i6 и FS-i6х можно назначить только 4 канала (Roll, Pitch, Yaw, Throttle). Режимы ARM, FlyMode, NavMode будут закреплены за клавишами (подробнее в разделе Управление).
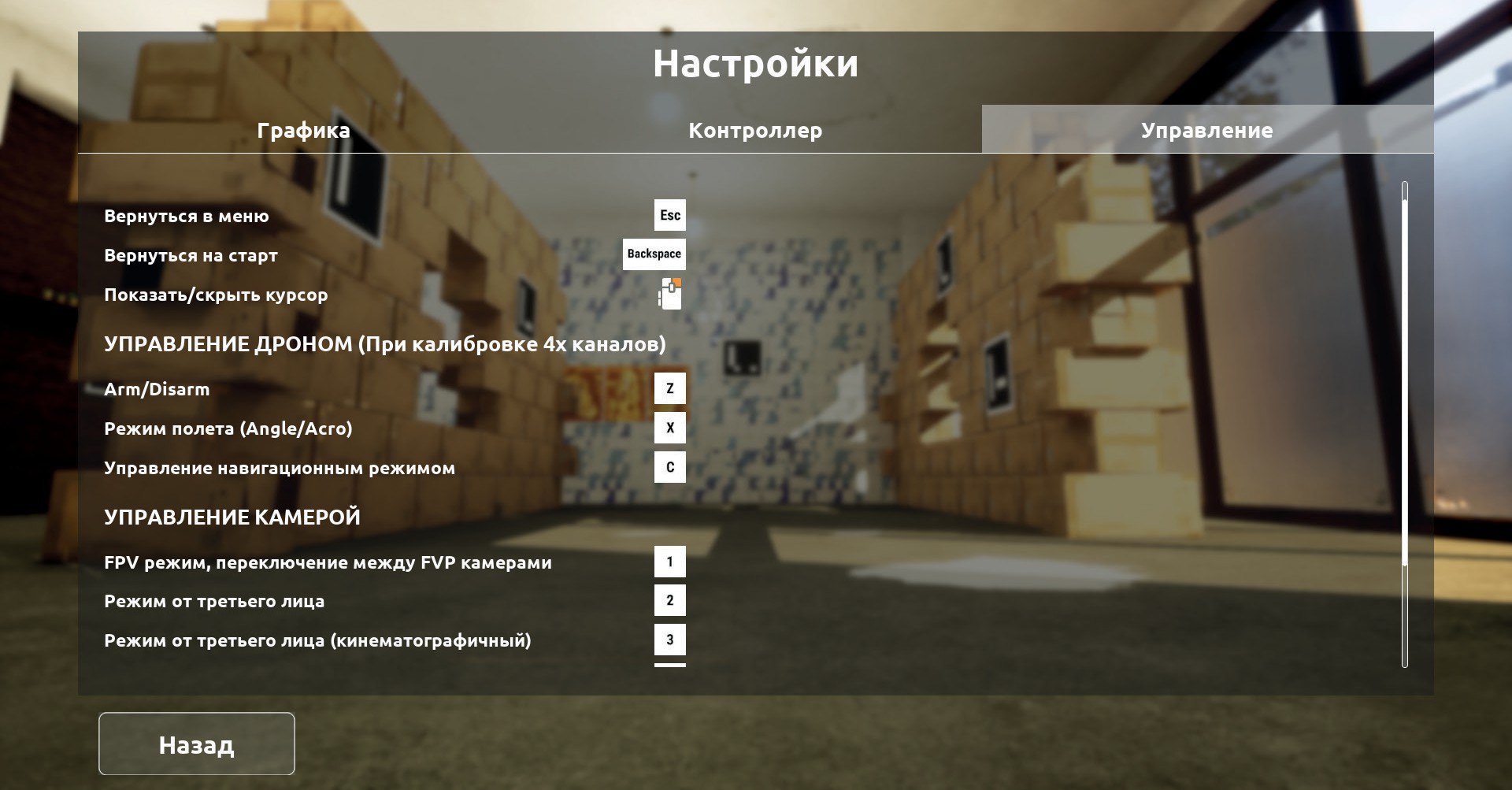
Вкладка «Управление»
Во вкладке «Управление» находится основная информация о горячих клавишах и возможностях, закрепленных за ними.
Пользовательский режим
Рабочее пространство начинается с выбора режима. Возможно работать как в Одиночном режиме, так и в Многопользовательском режиме, создав свое лобби или подключившись в уже созданное.


Выбор режима
При выборе «Одиночный режим», следующим шагом требуется сделать выбор по режиму работы. Представлены два режима: «Полет и планирование в свободном режиме» и «Обучающие уроки».
Полет и планирование в свободном режиме: этот режим дает полную свободу. Можно управлять любым доступным БПЛА, не выбирая точный маршрут и выполняя маневры, не связанные с заданием. Здесь можно развивать навыки пилотирования и планирования полетов без каких-либо ограничений в пределах области симуляции.
В режиме «Обучающие уроки»: можно изучать основы управления и навигации БПЛА. Задания и уроки помогут овладеть техникой управления дроном, освоить умения планирования полетов, выполнять различные маневры и приобрести необходимые навыки для безопасного и эффективного управления дроном.
Таким образом, выбирая подходящий режим, можно настроить обучение и практику в EduSim в соответствии с потребностями и уровнем подготовки.

Выбор дрона
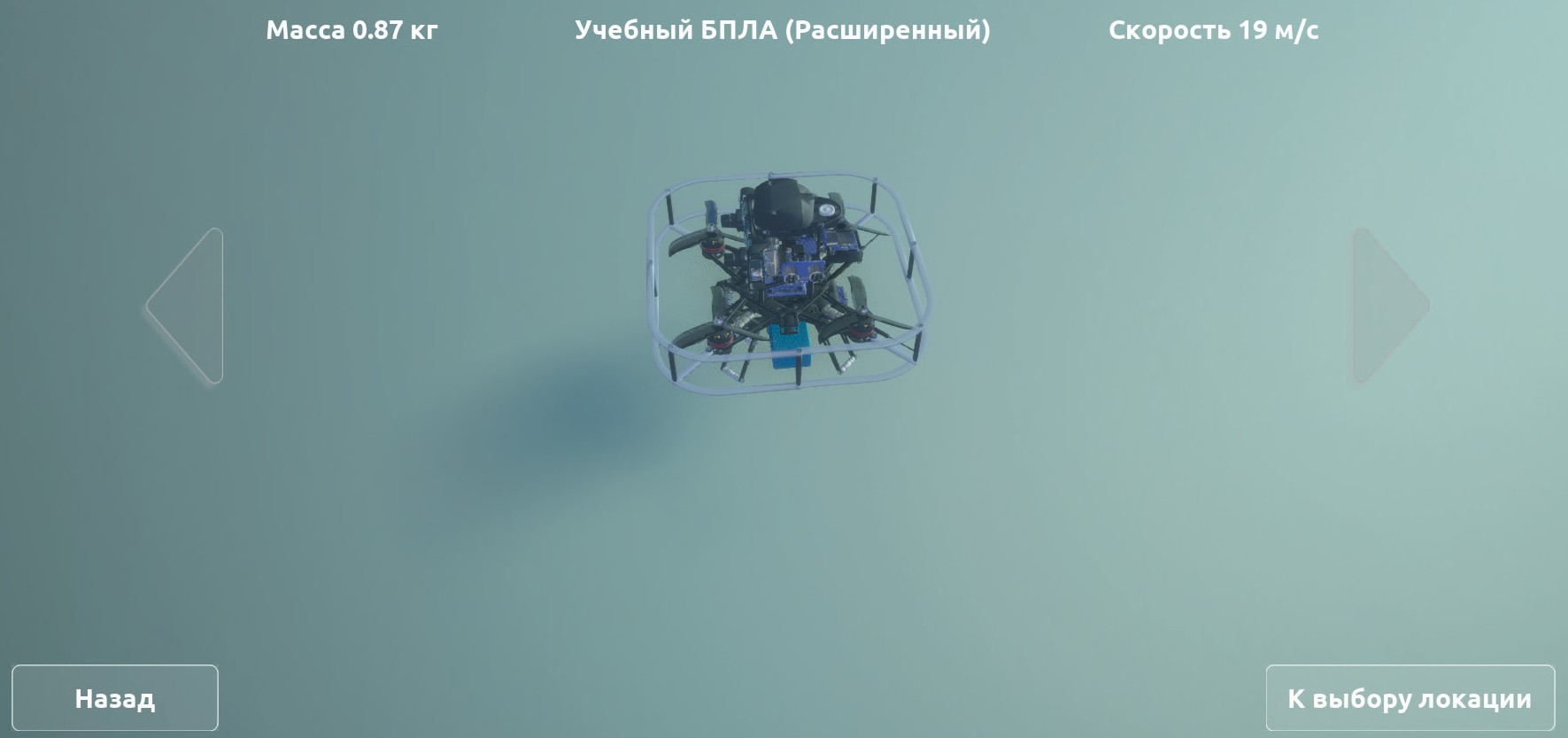
После выбора режима полета, требуется сделать выбор дрона. В симуляторе доступны квадрокоптеры как для образовательных целей и решения образовательных задач, так и более серьёзные виды, направленные на решение сложных и профильных задач:
Учебный БПЛА (Расширенный) это квадрокоптер для образовательных целей. Он оснащен различными сенсорами (например, лидар, ультразвуковой датчик), камерами и другими инструментами, что позволит учащимся изучить основы автопилотирования, демонстрировать принципы и концепции, связанных с робототехникой, искусственным интеллектом и компьютерным зрением. Масса дрона 0.87 кг, скорость - 19 м/с.
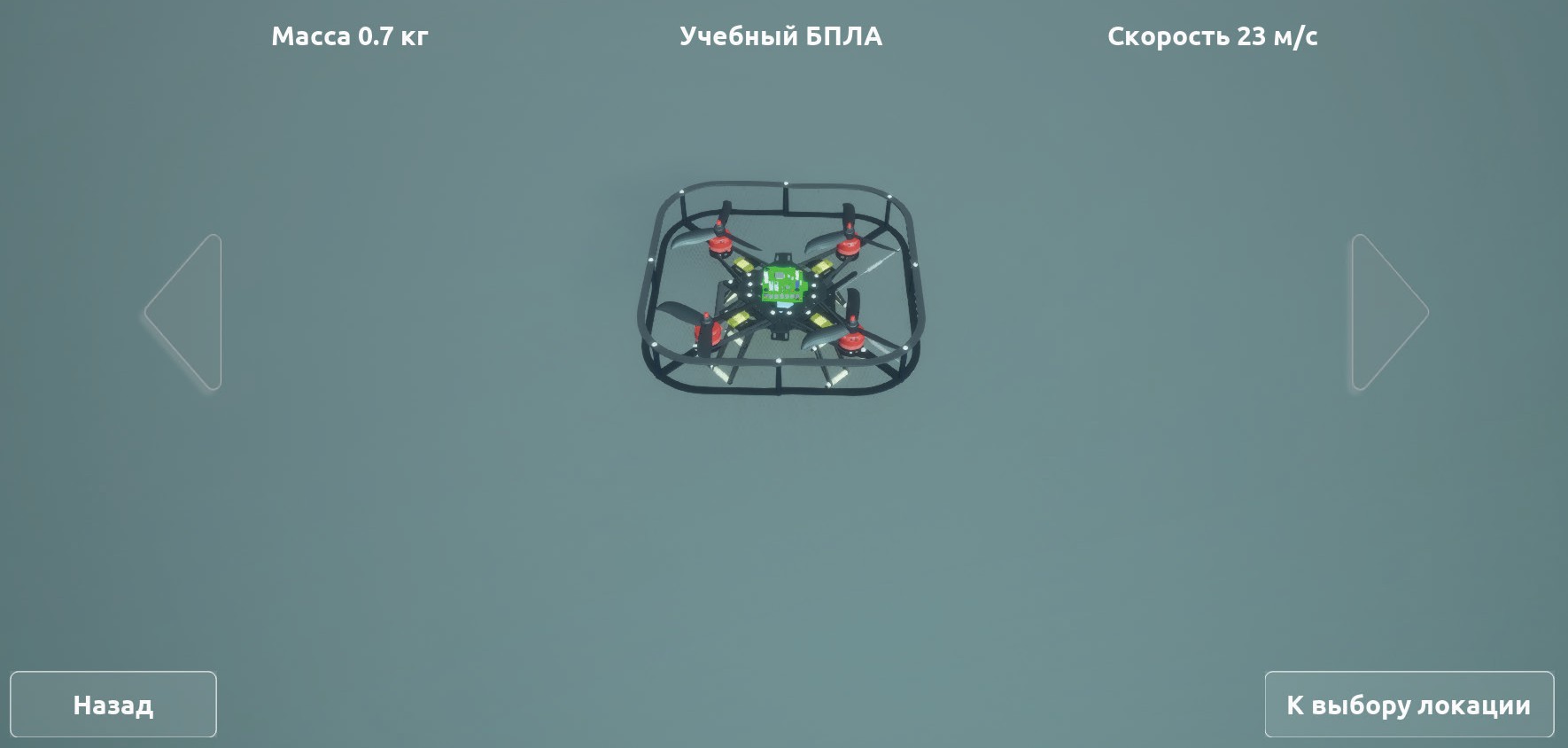
Учебный БПЛА - это квадрокоптер для образовательных целей. Это облегченный вариант «Учебный БПЛА (Расширенный)». По сравнению с Учебным БПЛА (Расширенный), на нем меньше датчиков, а значит и нагрузка на него меньше, что делает его манёвреннее и быстрее. Масса дрона 0.7 кг, скорость - 23 м/с.
Учебный БПЛА (Конструктор) - это квадрокоптер для образователь- ных целей. В сравнении с Учебным БПЛА (Расширенный) имеет другой набор датчиков и оснащен модулем захвата. Масса дрона 0,92 кг, скорость - 23 м/с.

Учебный FPV БПЛА - это квадрокоптер для образовательных целей. Он оснащен различными датчиками, камерами и другими инструментами, что позволяет учащимся изучать основы пилотирования и технологии полета от первого лица (FPV). Масса дрона 0,47 кг, скорость - 27 м/с.

ARA Mini - это сверхкомпактный и легкий дрон, для образовательных целей. ARA Mini значительно меньше и легче обычных дронов, что делает его более безопасными и удобными в использовании в ограниченных пространствах. Масса дрона - 0,23 кг, скорость 20 м/с.

Агрокоптер - это беспилотный летательный аппарат, разработанный для применения в сельском хозяйстве. Он предназначен для автоматизации и оптимизации различных процессов в сельском хозяйстве, таких как земледелие, пестициды, анализ урожаев и т. д. Масса дрона 20 кг, скорость - 15 м/с.

VTOL - Это тип самолета, который может взлетать, зависать и приземляться вертикально, без взлетно-посадочной полосы. Масса - 1 кг, скорость - 30 м/с.

Планер - это БПЛА, выполненный в виде монокрыла, оснащенного одним приводным винтом и двумя сервомоторами для управления элеронами. Планер оснащен камерой для выполнения задач по аэрофотосъемке. Масса планера 0,6 кг, максимальная скорость полета 40 м/с.

Выбор локации
В качестве локации доступны карты:
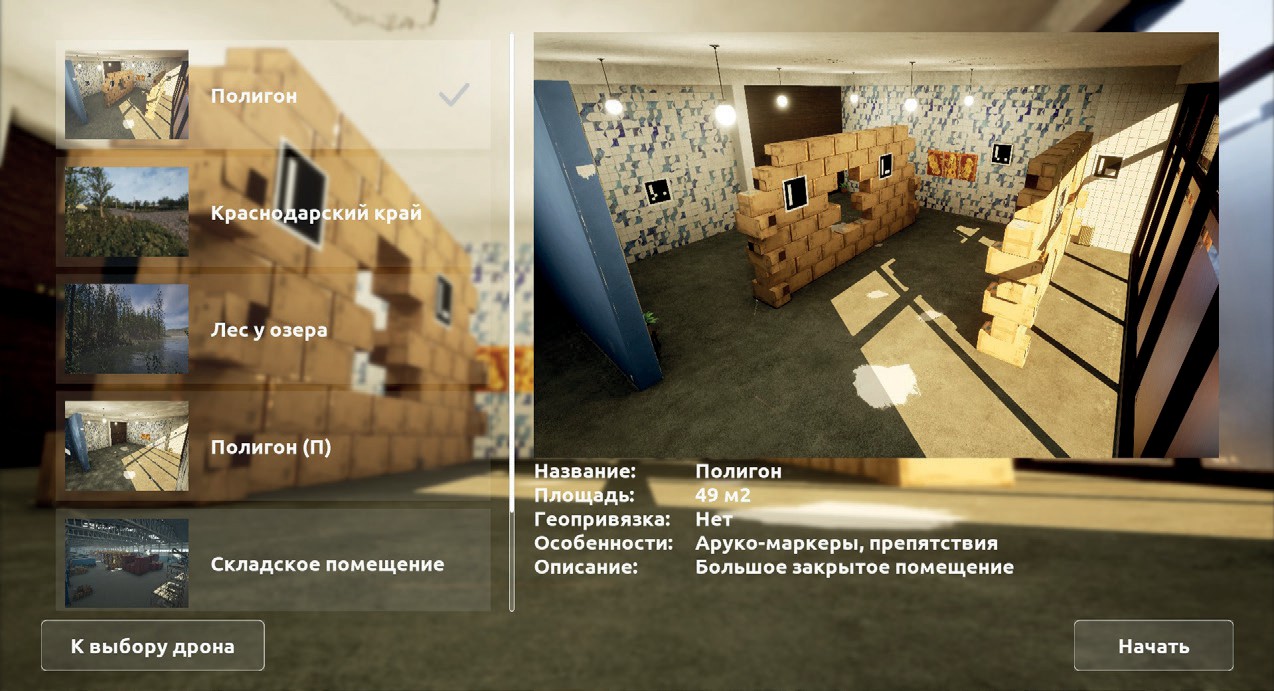
Полигон - на карте расположены препятствия с нанесенными Aruco маркерами. Площадь карты 0,06 км2.
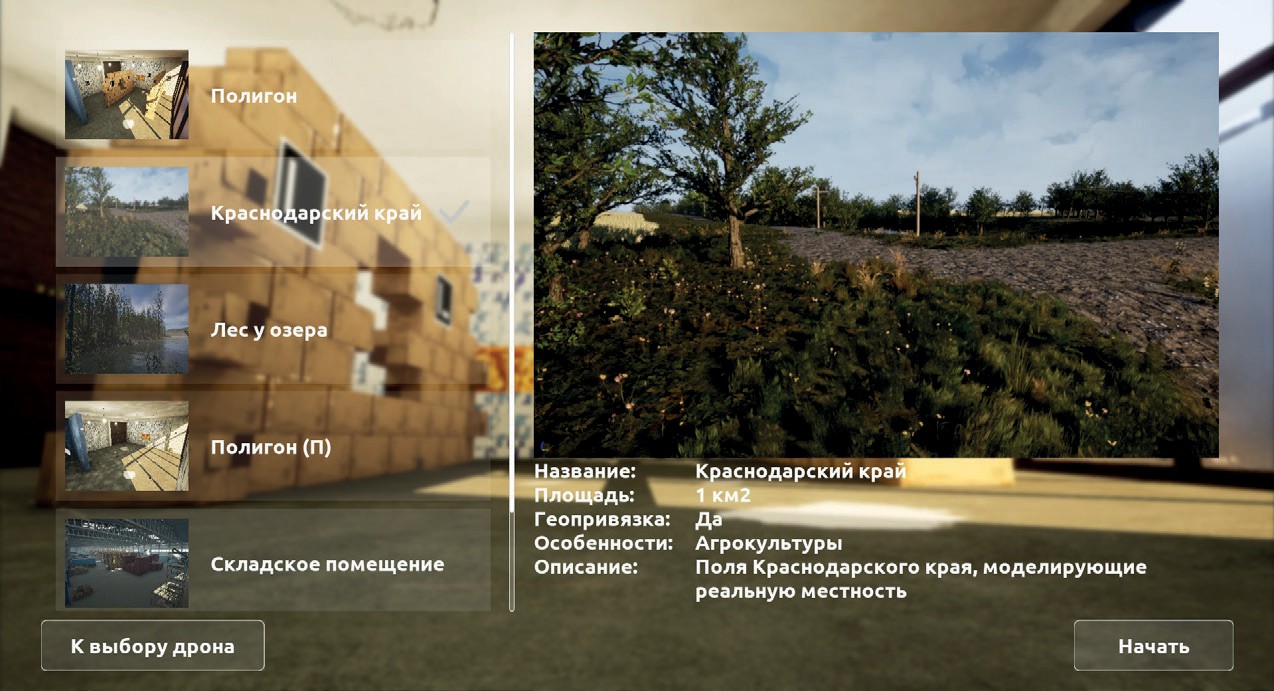
Краснодарский край на карте расположены равнины с полями и холмистые земли с реками и озерами. У данной локации есть реальная геопривязка. Площадь карты 1 км2.
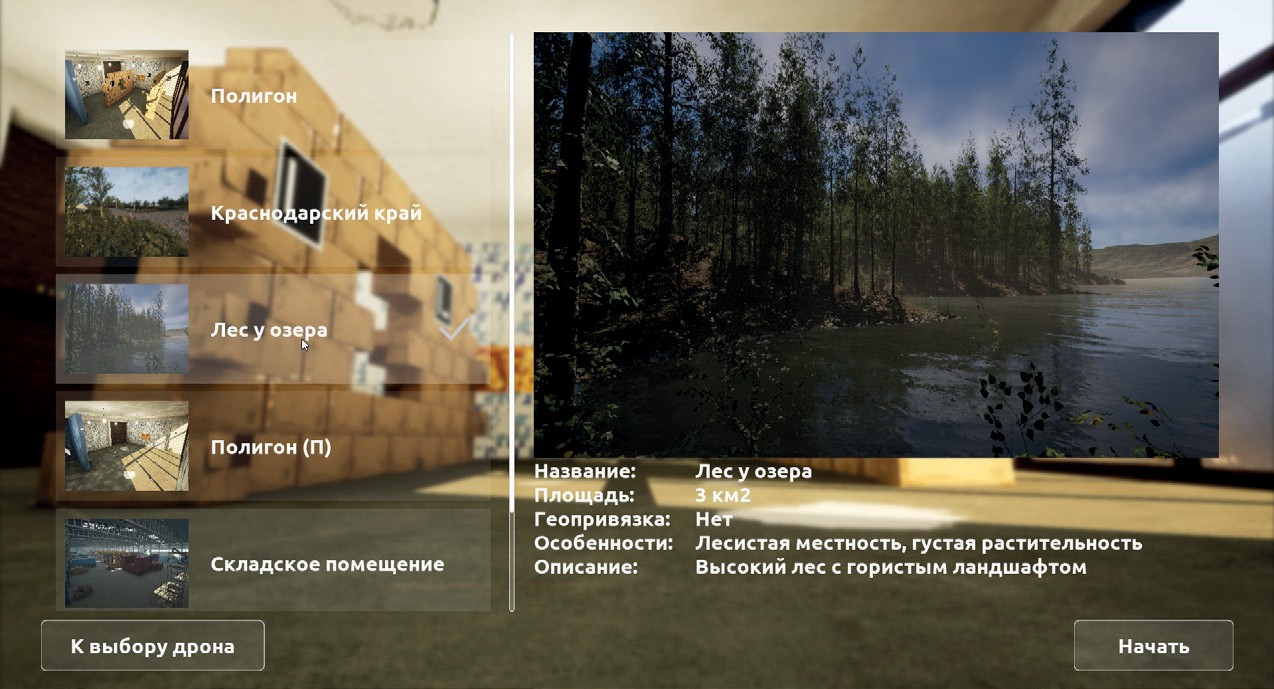
Лес у озера на карте представлен участок природы в Архангельской области, расположенный возле озера и покрытый густым лесом. У данной локации есть реальная геопривязка. Площадь карты 3 км2 .
Полигон (П) - карта Полигона без препятствий, но с подвижными Aruco маркерами. Площадь карты 0,06 км2.

Симуляционная среда
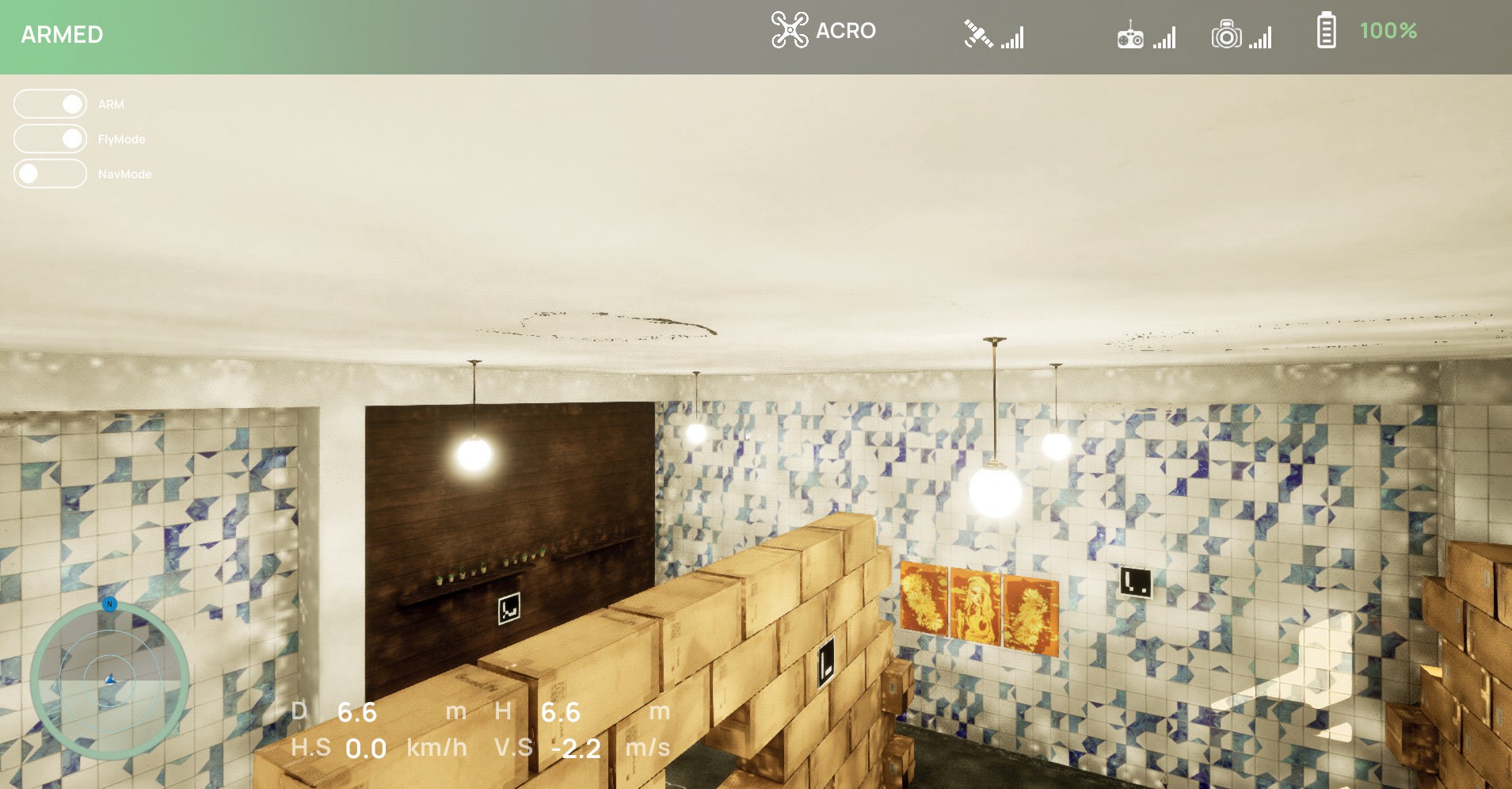
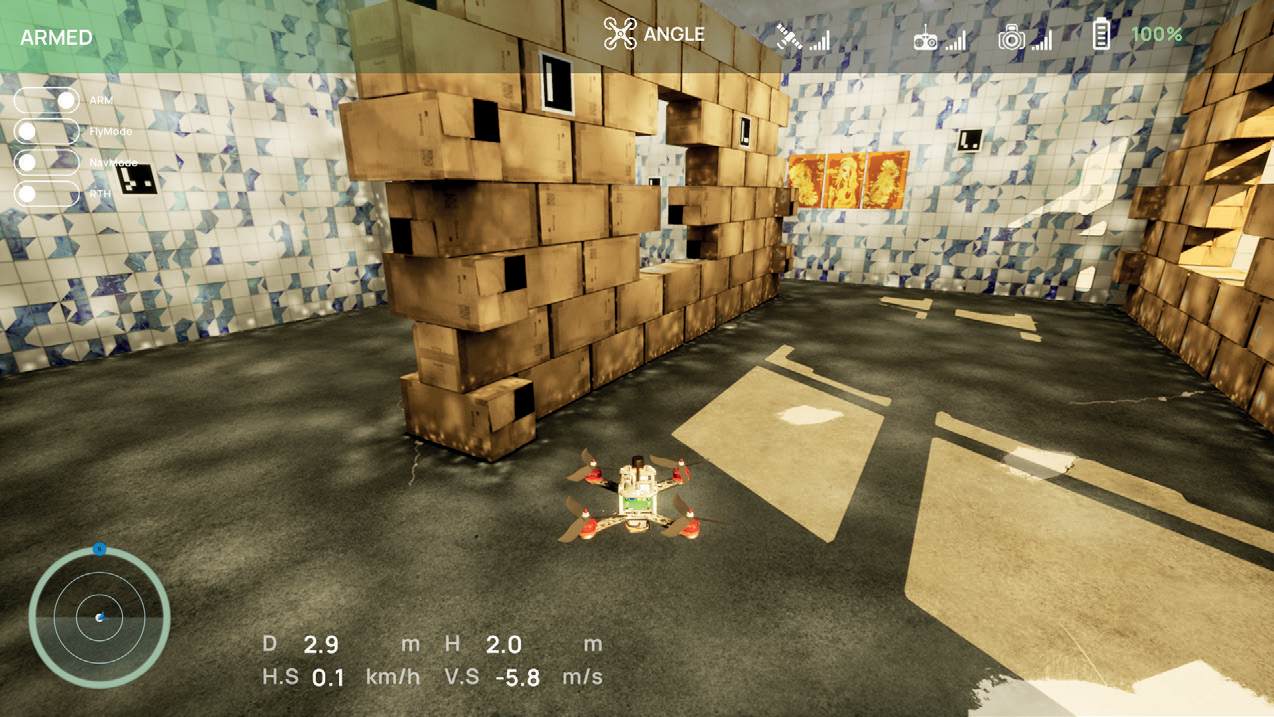
После выбора дрона и карты пользователь попадает в среду симуляции.

В верхней части отображается информация о режиме полета. В левом верхнем углу выводится информация о пульте, состоянии стиков и о состоянии дрона.
В нижней части располагается информация о расстоянии от места старта (D), высота относительно точки старта (H), горизонтальная скорость (H.S.) и вертикальная скорость (V.S.).
В левом нижнем углу отображается положение дрона относительно точки старта и его ориентация относительно севера.

Начало полета
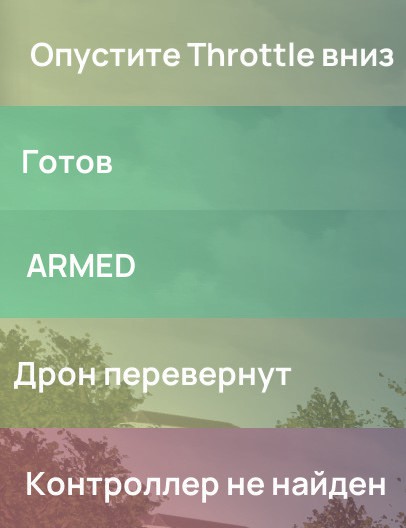
После того как зашли в среду симуляции убедимся, что пульт подключен. Опускаем на пульте Throttle вниз, деактивируем все кнопки, переключатели. Переводим дрон в состояние ARMED, активировав переключатель, закрепленный за каналом ARM, или нажав на соответствующую клавишу.

Теперь, перемещая стики, можно управлять дроном.

Для смены режима полета требуется активировать кнопку, закрепленную за FlyMode, или нажав на соответствующую клавишу.

Во время симуляции можно переключаться между камерами (подробнее в разделе «Управление»), есть возможность управления как от 3 лица, так и от 1 лица (режим FPV).
Для выхода в главное меню нажимаем клавишу ESC.
Первый полет
Первый полет на квадрокоптере особенный, так как он знакомит с особенностями управления квадрокоптером, его функциональностью и, в целом, с особенностями работы с ним. Первый полет позволяет освоить базовые принципы управления квадрокоптером с помощью пульта управления. Это включает в себя понимание действия каждого из джойстиков и их влияния на движение квадрокоптера. Взлет и посадка позволяют оценить стабильность и устойчивость квадрокоптера в воздухе. Это важно для обеспечения безопасности полета и избегания потенциальных аварий в дальнейшим.
Первый полет в симуляторе
Выберите учебный FPV БПЛА.

Находясь в запущенной симуляции проверьте, что пульт включен и подключен, все кнопки и переключатели на пульте находились в состоянии деактивации, а стик Throttle опущен вниз. Если на пульте настроены только 4 канала, проверьте что клавиши не были случайно задеты все ползунки стоят в крайнем левом положении.
Переключите стик на пульте, отвечающий за ARM, или нажмите на соответствующую клавишу, в это время у дрона закрутятся винты.

Централизируйте стики Roll, Pitch, Yaw. Осторожно поднимайте Throttle вверх, пока дрон не оторвется от земли, постарайтесь задержаться на одной высоте, регулируя ей стиком Throttle.
Для посадки централизируйте стики Roll, Pitch, Yaw, опустите стик Throttle.

Когда дрон достигнет земли переведите в состояние DISARMED, переключите стик на пульте, отвечающий за ARM, или нажмите на соответствующую клавишу, винты прекращают вращаться.
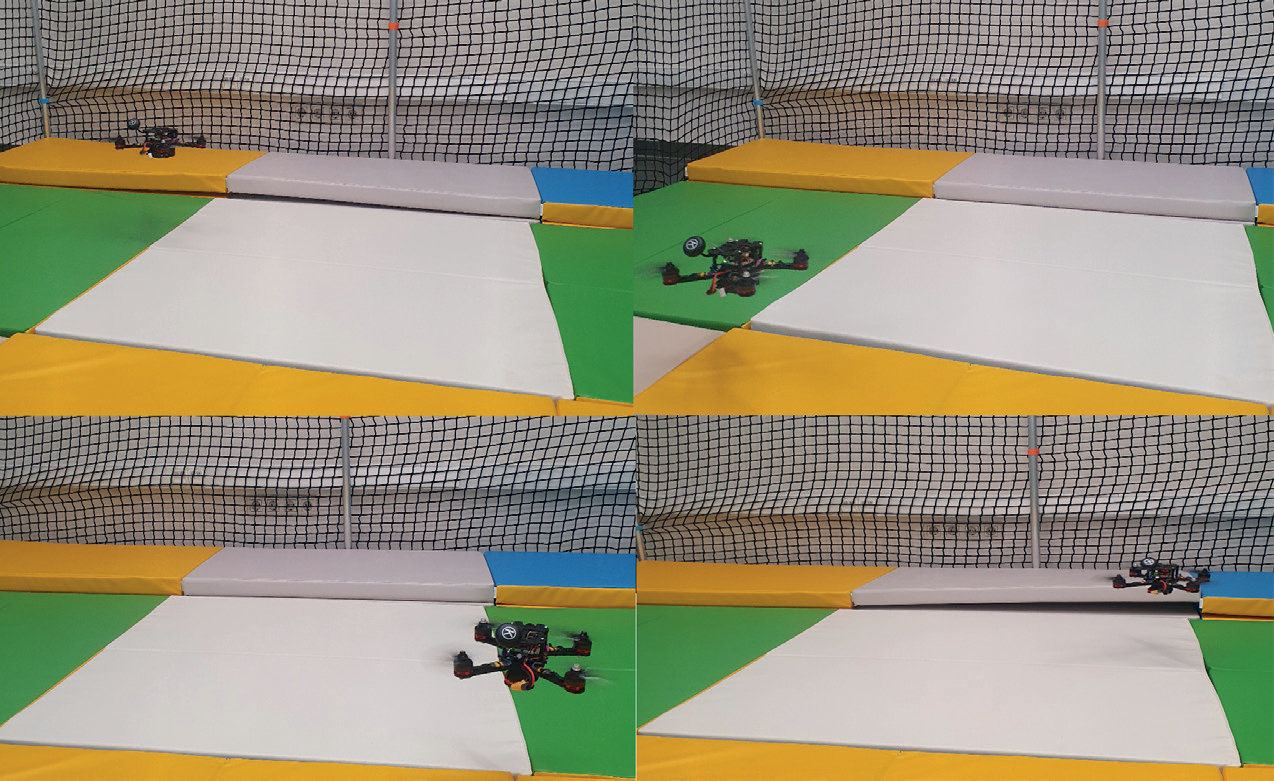
Взлет посадка в жизни
Для безопасных полетов используйте площадки (полигоны), ограниченные сеткой. Проверьте окружающую обстановку и убедитесь, что нет препятствий или людей поблизости. Наденьте специальных защитные очки. Убедитесь, что батарея полностью заряжена. Проверьте пропеллеры на наличие повреждений и убедитесь, что они правильно установлены. 
Проверьте, чтобы все кнопки и переключатели на пульте находились в состоянии деактивации, а стик Throttle опущен вниз. Включите пульт.
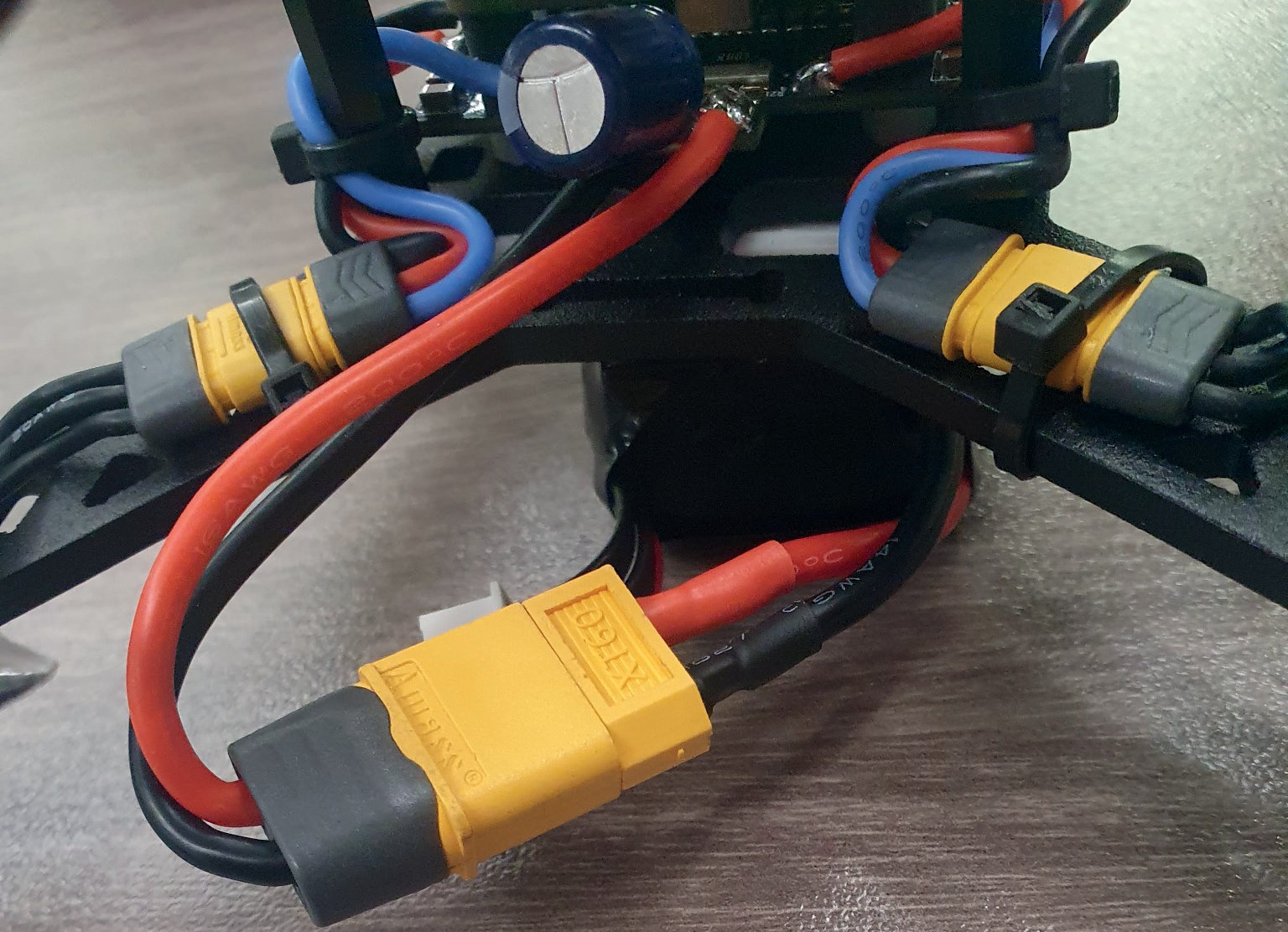
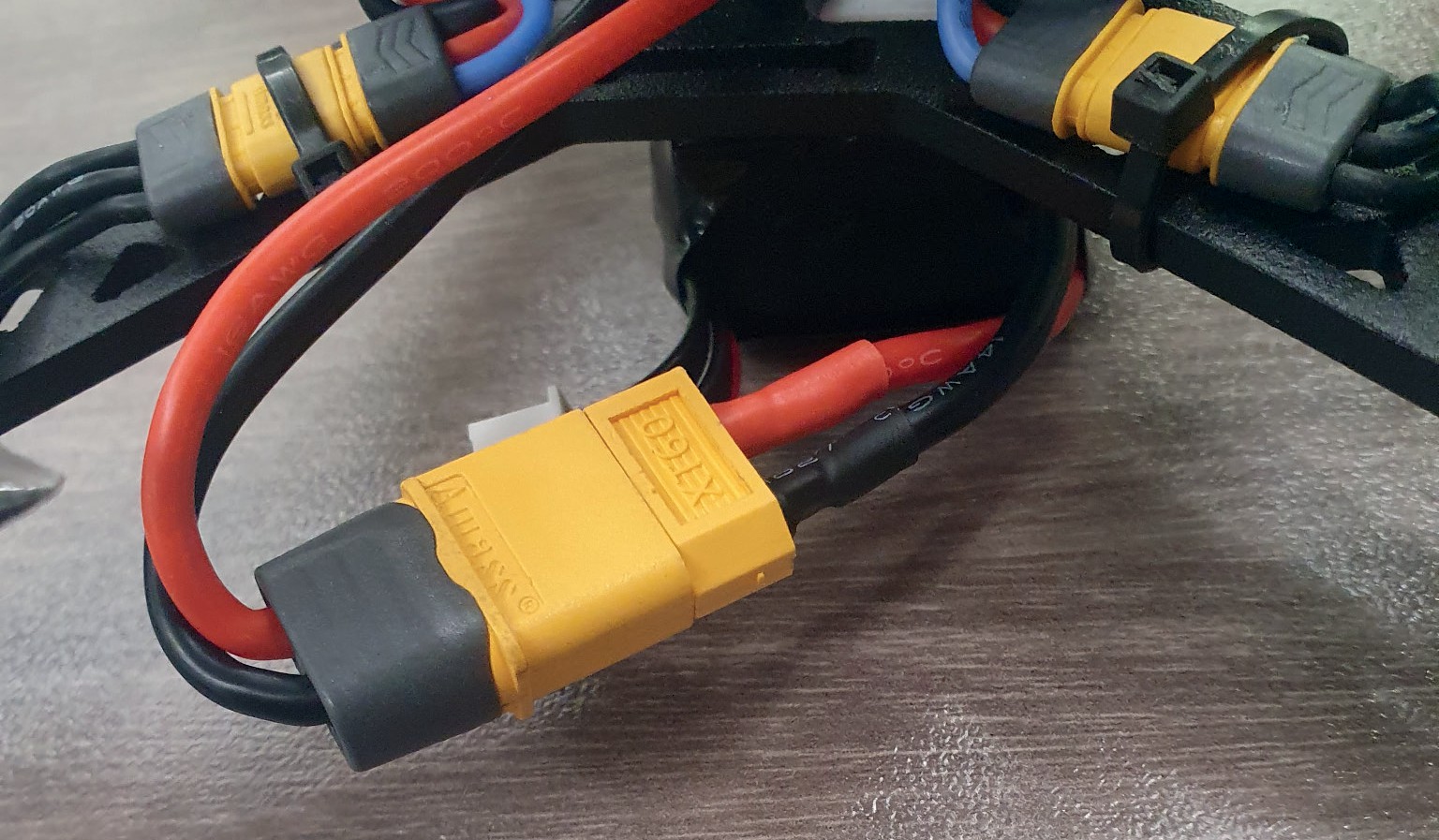
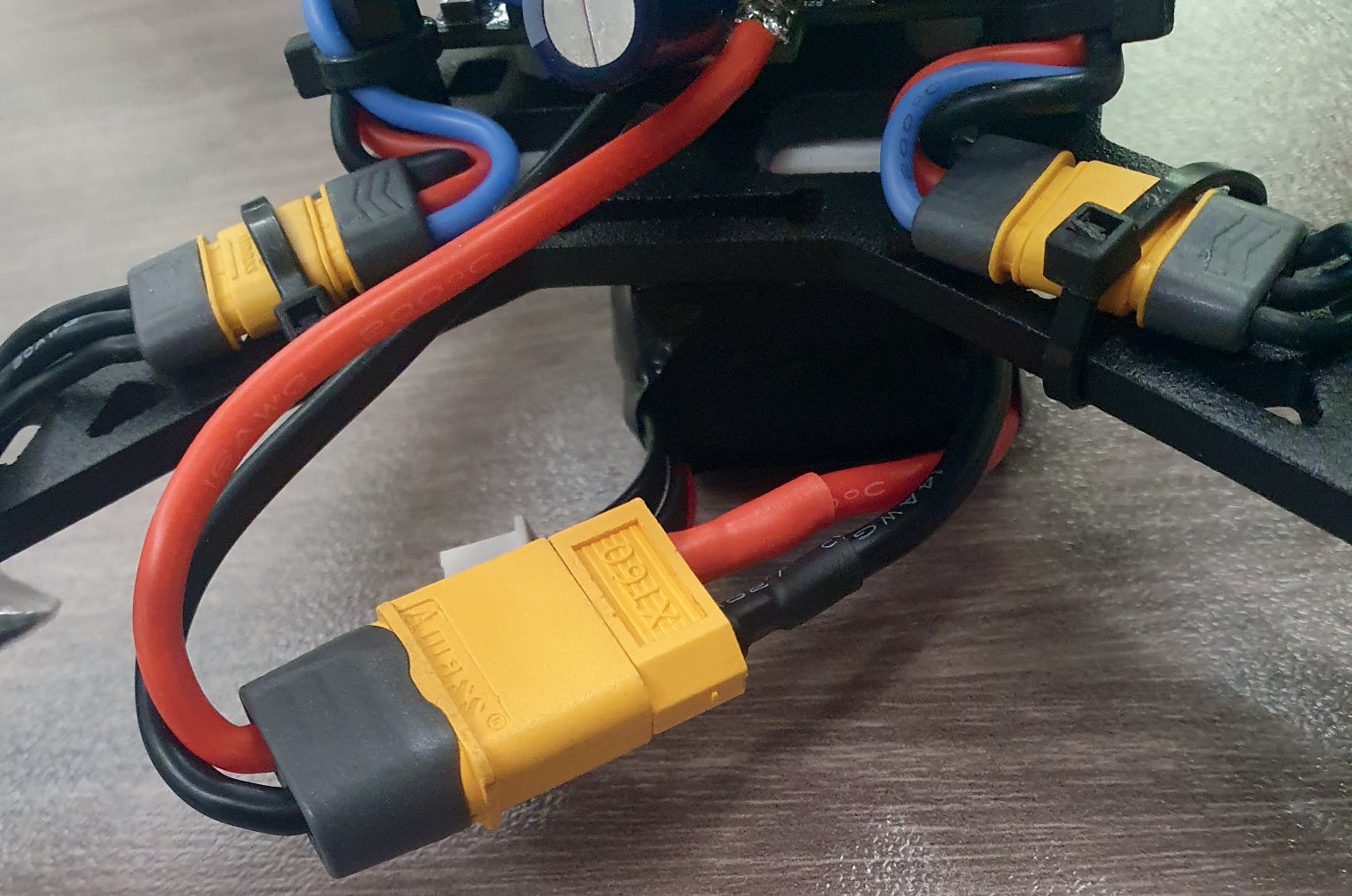
Подключите питание к дрону. После трех звуковых сигналов дрон готов к работе, если звуковые сигналы не прекращаются, отключите питание и проверьте схему подключения.
Установите дрон на полигоне и отойдите на безопасное расстояние (около 4 метров).

Переключите стик на пульте, отвечающий за 5 канал, тем самым переведя дрон в режим ARM, в это время у дрона закрутятся винты. Централизируйте стики Roll, Pitch, Yaw. Осторожно поднимайте Throttle вверх, пока дрон не оторвется от земли, постарайтесь задержаться на одной высоте, регулируя ей стиком Throttle.

Для посадки централизируйте стики Roll, Pitch, Yaw, осторожно опустите стик Throttle. Когда дрон достигнет земли переведите в состояние DISARMED, переключив переключатель, закрепленный за 5 каналом, винты прекращают вращаться. Отключите питание. Отключите пульт.
Полет по линии
Задача кейса, научится летать в режиме ACRO, контролируя высоту. Режим ACRO обеспечивает пилотам полный контроль над квадрокоптером, что позволяет выполнять более динамичные и сложные маневры. Овладение контролем высоты в режиме ACRO необходимо для высшего пилотажа, гонок дронов и решения многих других задач. Режим ACRO также повышает общие навыки пилотирования и понимание поведения квадрокоптера.
Полет по линии в симуляторе
Выбираем учебный FPV БПЛА.

В запущенной симуляции проверяем, чтобы пульт был включен и подключен, а все кнопки и переключатели на пульте находились в состоянии деактивации, стик Throttle опущен вниз. Если на пульте настроены только 4 канала, проверяем чтобы клавиши не были случайно задеты все ползунки стоят в крайнем левом положении.
Переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, в это время у дрона закрутятся винты.
Установите стики Roll, Pitch, Yaw в центральное положение. Осторожно поднимаем Throttle вверх, пока дрон не поднимется на желаемую высоту. После стараемся задержаться на одной высоте, регулируя её стиком Throttle.

Переключаем стик на пульте, отвечающий за FlyMode, или нажимаем на соответствующую клавишу, тем самым, переведя дрон в режим ACRO.
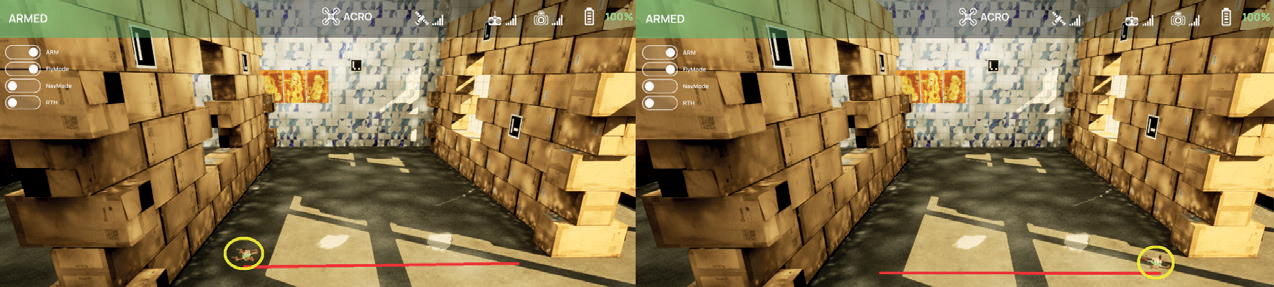
Переключимся в FPV режим (Подробнее во вкладке «Настройки» → «Управление»). Осторожно перемещаем стик Pitch вперед для перемещения дрона вперед. Стараемся держать одно направление. Высоту продолжаем регулировать стиком Throttle.
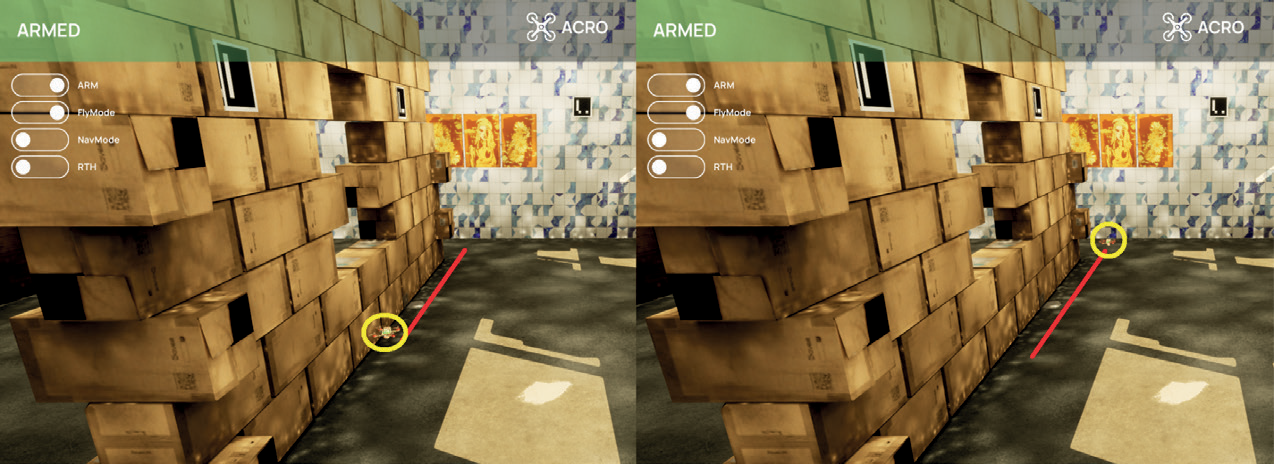
Пролетев по прямой линии, зависаем в последней точке. Пробуем повторить те же шаги перемещаясь из стороны в сторону, используя стик Roll. Высоту продолжаем регулировать стиком Throttle.
Для посадки централизуем стики Roll, Pitch, Yaw, опускаем стик Throttle. Когда дрон достигнет земли переводим в состояние DISARMED, переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, винты прекращают вращаться.
Полет по линии в жизни
Для безопасных полетов рекомендуется выбирать площадки (полигоны), ограниченные сеткой. Обязательно проверяем окружающую обстановку и убеждаемся в том, что нет препятствий или людей поблизости. Надеваем специальные защитные очки. Убедимся, что батарея полностью заряжена. Проверяем пропеллеры наналичие повреждений и правильность установки.
Проверяем, чтобы все кнопки и переключатели на пульте находились в состоянии деактивации, а стик Throttle опущен вниз. Включаем пульт. Подключаем питание к дрону. После трех звуковых сигналов дрон готов к работе, если звуковые сигналы не прекращаются, то отключаем питание и проверяем схему подключения.

Устанавливаем дрон на полигоне и отходим на безопасное расстояние (около 4 метров).

Переключаем стик на пульте, отвечающий за 5 канал, тем самым, переведя дрон в режим ARM, в это время у дрона закрутятся винты. Установите стики Roll, Pitch, Yaw в центральное положение. Осторожно поднимаем Throttle вверх, пока дрон не поднимется на желаемую высоту. После стараемся задержаться на одной высоте, регулируя её стиком Throttle .

Переключаем стик на пульте, отвечающий за FlyMode, или нажимем на соответствующую клавишу тем самым переведя дрон в режим ACRO. Осторожно перемещаем стик Pitch вперед для перемещения дрона вперед. Стараемся держать одно направление. Высоту продолжаем регулировать стиком Throttle.

Пролетев по прямой линии, зависаем в последней точке. Пробуем повторить те же шаги перемещаясь из стороны в сторону, используя стик Roll. Высоту продолжаем регулировать стиком Throttle.
Для посадки централизуем стики Roll, Pitch, Yaw, опускаем стик Throttle Когда дрон достигнет земли переводим в состояние DISARMED, переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, винты прекращают вращаться. Отключаем питание. Отключаем пульт.
Полет по линии в FPV очках
При работе в очках повторяем все шаги из раздела “Полет по линии в жизни”. *Внимание! ***В FPV очках обзор ограничен, поэтому необходимо внимательнее относиться к движениям, которые совершаются рекомендуем придерживаться следующих этапов:
- Надеваем FPV очки и подключаем их к квадрокоптеру. Важно убедиться, что очки правильно откалиброваны и обеспечивают четкое изображение.
- Выбираем прямую линию. Найдите на земле прямую линию или заранее расставленные маркеры для ее обозначения. Начиная с коротких линий, постепенно увеличиваем их длину по мере освоения навыка.
- Смотря вперед через FPV очки, выравниваем квадрокоптер по линии. Используем стики управления для точной настройки положения.
- Медленно двигаем квадрокоптер вперед по линии. Сохраняем постоянную скорость и высоту.
- Постоянно следим за положением квадрокоптера через FPV очки. При необходимости, используем стики управления для корректировки курса и высоты.
- Для посадки устанавливаем стики Roll, Pitch, Yaw в центральное положение, осторожно опускаем стик Throttle.
- Когда дрон достигнет земли, переводим в состояние DISARMED, переключив переключатель, закрепленный за 5 каналом, винты прекращают вращаться. Снимите очки. Отключаем питание. Отключаем пульт.
Полёт с ускорением
Задачей данного кейса, научится управлять скоростью в режиме ACRO, продолжая контролировать высоту.
Управление скоростью в режиме ACRO позволяет пилотам выполнять более точные и сложные маневры. Оно необходимо для гонок на дронах, фристайла и выполнению других задач. Этот навык также повышает общие навыки пилотирования и понимание поведения квадрокоптера.
Полёт с ускорением в симуляторе
Выбираем учебный FPV БПЛА.

В запущенной симуляции проверяем, чтобы пульт был включен и подключен, а все кнопки и переключатели на пульте находились в состоянии деактивации, стик Throttle опущен вниз. Если на пульте настроены только 4 канала, проверяем чтобы клавиши не были случайно задеты все ползунки стоят в крайнем левом положении. Переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, в это время у дрона закрутятся винты.
Установите стики Roll, Pitch, Yaw в центральное положение. Осторожно поднимаем Throttle вверх, пока дрон не поднимется на желаемую высоту. После стараемся задержаться на одной высоте, регулируя её стиком Throttle.
Переключаем стик на пульте, отвечающий за FlyMode, или нажимаем на соответствующую клавишу тем самым переведя дрон в режим ACRO.
Переключаемся в FPV режим (Подробнее во вкладке «Настройки» → «Управление»). Резко перемещаем стик Pitch вперед для того чтобы дрон переместился вперед. Высоту продолжаем регулировать стиком Throttle.

Перед препятствием резко сбрасываем скорость, переместив стик Pitch в центр или назад. Не отпускаем стик Throttle. Высоту продолжаем регулировать стиком Throttle. Повторяем те же действия, совершая полет в обратном направлении. Для этого разгоняем дрон, подав стик Pitch назад, а перед препятствием резко сбрасываем скорость, переместив стик Pitch в центр или вперед. Высоту всё так же продолжаем регулировать стиком Throttle. Для посадки устанавливаем стики Roll, Pitch, Yaw в центральное положение, опускаем стик Throttle . Когда дрон достигнет земли переводим в состояние DISARMED, переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, винты прекращают вращаться.
Полёт с ускорением в жизни
Для безопасных полетов рекомендуется выбирать площадки (полигоны), ограниченные сеткой. Обязательно проверяем окружающую обстановку и убеждаемся в том, что нет препятствий или людей поблизости. Надеваем специальные защитные очки. Убедимся, что батарея полностью заряжена. Проверяем пропеллеры на наличие повреждений и правильность установки.
Проверяем, чтобы все кнопки и переключатели на пульте находились в состоянии деактивации, а стик Throttle опущен вниз. Включаем пульт. Подключаем питание к дрону. После трех звуковых сигналов дрон готов к работе, если звуковые сигналы не прекращаются, то отключаем питание и проверяем схему подключения.

Устанавливаем дрон на полигоне и отходим на безопасное расстояние (около 4 метров).

Переключите стик на пульте, отвечающий за 5 канал, тем самым, переведя дрон в режим ARM, в это время у дрона закрутятся винты. Установите стики Roll, Pitch, Yaw в центральное положение. Осторожно поднимаем Throttle вверх, пока дрон не поднимется на желаемую высоту. После стараемся задержаться на одной высоте, регулируя её стиком Throttle . Переключаем стик на пульте, отвечающий 6 канал, тем самым переведя дрон в режим ACRO - режим в котором обычно летают на FPV дронах. Резко перемещаем стик Pitch вперед для того, чтобы дрон переместился вперед. Высоту продолжаем регулировать стиком Throttle. Перед препятствием резко сбрасываем скорость, переместив стик Pitch в центр или назад. Не отпускаем стик Throttle. Высоту продолжаем регулировать стиком Throttle. Повторяем те же действия, совершая полет в обратном направлении. Для этого разгоняем дрон, подав стик Pitch назад, а перед препятствием резко сбрасываем скорость, переместив стик Pitch в центр или вперед. Высоту всё так же продолжаем регулировать стиком Throttle. Для посадки устанавливаем стики Roll, Pitch, Yaw в центральное положение, опускаем стик Throttle . Когда дрон достигнет земли переводим в состояние DISARMED, переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, винты прекращают вращаться. Отключаем питание. Отключаем пульт.
Полёт с ускорением в FPV очках
При работе в очках повторяем все шаги из раздела “Полёт с ускорением в жизни”. **_Внимание! _**В FPV очках обзор ограничен, поэтому необходимо внимательнее относиться к движениям, которые совершаются. Рекомендуем придерживаться следующих этапов:
- Надеваем FPV очки и подключаем их к квадрокоптеру. Важно убедиться, что очки правильно откалиброваны и обеспечивают четкое изображение.
- При взгляде «вперед» через FPV очки. Убедимся, что впереди свободный путь. Медленно увеличиваем тягу двигателей, чтобы квадрокоптер начал набирать скорость. Начинаем с небольших ускорений и постепенно увеличиваем их по мере освоения навыка.
- Постоянно следим за положением квадрокоптера через FPV очки. При необходимости требуется использовать стики управления для корректировки курса и высоты.
- Когда квадрокоптер достигнет желаемой скорости, начинаем постепенно уменьшать тягу двигателей. Это замедлит квадрокоптер и поможет избежать столкновения с препятствиями.
- Для посадки устанавливаем стики Roll, Pitch, Yaw в центральное положение, осторожно опускаем стик Throttle.
- Когда дрон достигнет земли переводим в состояние DISARMED, переключив переключатель, закрепленный за 5 каналом, винты прекращают вращаться. Снимите очки. Отключаем питание. Отключаем пульт.
Полет по квадрату
Задачей данного кейса, научиться выполнять плавный и контролируемый полет по квадрату.
Полет по квадрату - это маневр среднего уровня, который требует хороших навыков управления квадрокоптером. Он используется в различных приложениях, таких как аэрофотосъемка, инспекции и гонки на дронах. Овладение полетом по квадрату повышает общую уверенность пилота в управлении квадрокоптером и позволяет выполнять более сложные маневры.
Полет по квадрату в симуляторе
Выбираем учебный FPV БПЛА.

В запущенной симуляции проверяем, чтобы пульт был включен и подключен, а все кнопки и переключатели на пульте находились в состоянии деактивации, стик Throttle опущен вниз. Если на пульте настроены только 4 канала, проверяем, чтобы клавиши не были случайно задеты все ползунки стоят в крайнем левом положении.
Переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, в это время у дрона закрутятся винты.

Установите стики Roll, Pitch, Yaw в центральное положение. Осторожно поднимаем Throttle вверх, пока дрон не поднимется на желаемую высоту. После стараемся задержаться на одной высоте, регулируя её стиком Throttle.

Переключаем стик на пульте, отвечающий за FlyMode, или нажимаем на соответствующую клавишу, тем самым, переведя дрон в режим ACRO.
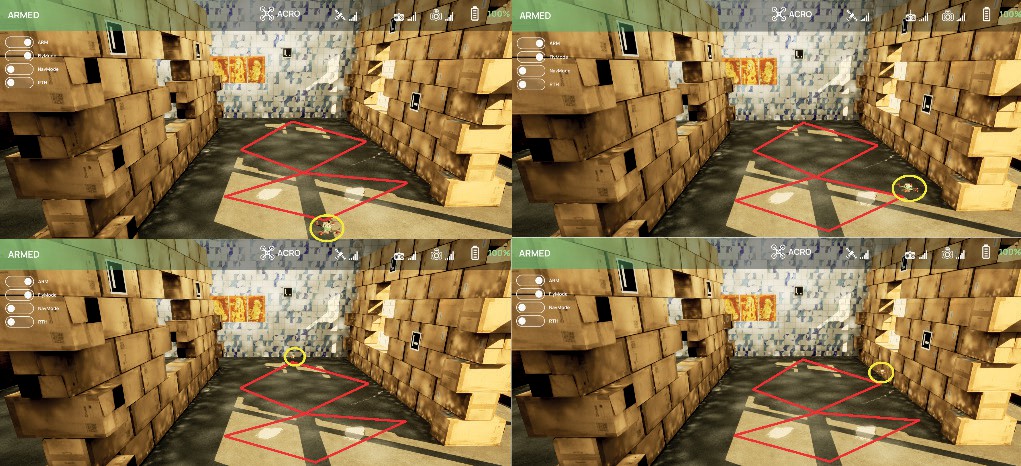
Переключаемся в FPV режим (Подробнее во вкладке «Настройки» → «Управление»). Управляя стиками Pitch, Yaw пролетите заданную траекторию.
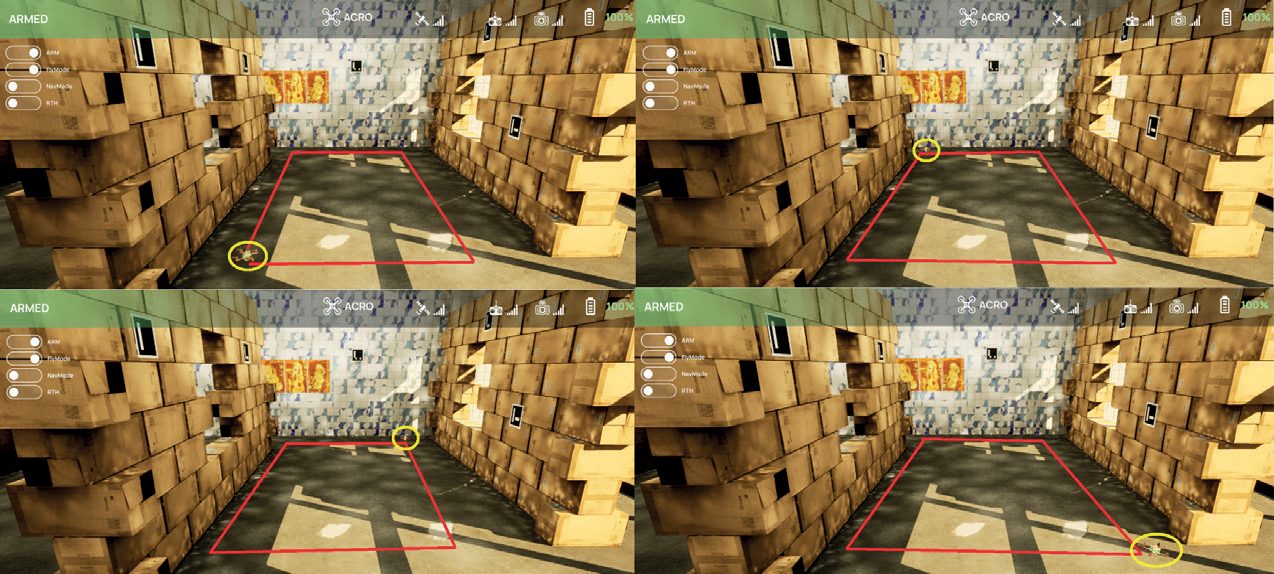
Обратите внимание, в каждом углу квадрата необходимо будет выполнить разворот в направлении следующей стороны и продолжить полет по оси тангажа (Pitch). Высоту всё так же продолжаем регулировать стиком Throttle. Для посадки устанавливаем стики Roll, Pitch, Yaw в центральное положение, опускаем стик Throttle . Когда дрон достигнет земли, переводим в состояние DISARMED, переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, винты прекращают вращаться.
Полет по квадрату в жизни
Для безопасных полетов рекомендуется выбирать площадки (полигоны), ограниченные сеткой. Обязательно проверяем окружающую обстановку и убеждаемся в том, что нет препятствий или людей поблизости. Надеваем специальные защитные очки. Убедимся, что батарея полностью заряжена. Проверяем пропеллеры на наличие повреждений и правильность установки.

Проверяем, чтобы все кнопки и переключатели на пульте находились в состоянии деактивации, а стик Throttle опущен вниз. Включаем пульт. Подключаем питание к дрону. После трех звуковых сигналов дрон готов к работе, если звуковые сигналы не прекращаются, то отключаем питание и проверяем схему подключения.
Устанавливаем дрон на полигоне и отходим на безопасное расстояние (около 4 метров).

Переключаем стик на пульте, отвечающий за 5 канал, тем самым переведя дрон в режим ARM, в это время у дрона закрутятся винты. Установите стики Roll, Pitch, Yaw в центральное положение. Осторожно поднимаем Throttle вверх, пока дрон не поднимется на желаемую высоту. После стараемся задержаться на одной высоте, регулируя её стиком Throttle. Переключаем стик на пульте, отвечающий за FlyMode, или нажимем на соответствующую клавишу тем самым переведя дрон в режим ACRO. Управляя стиками Pitch, Roll требуется пролететь заданную траекторию. После освоения данного маневра пробуем выполнить полет спиной (дрон движется на вас, обращенный к вам своей задней частью).
Для усложнения задачи и отработки полученных умений движемся по заданной траектории, затем разворачиваемся и летим по ней еще раз, но уже так, чтобы дрон был обращен в сторону полета своей передней частью. Высоту продолжаем регулировать стиком Throttle. Для посадки централизуем стики Roll, Pitch, Yaw, опускаем стик Throttle Когда дрон достигнет земли переводим в состояние DISARMED, переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, винты прекращают вращаться. Отключаем питание. Отключаем пульт.
Полет по квадрату в FPV очках
При работе в очках повторяем все шаги из раздела “Полет по квадрату в жизни”. *Внимание! ***В FPV очках обзор ограничен, поэтому необходимо внимательнее относиться к движениям, которые совершаются. Рекомендуем придерживаться следующих этапов:
- Надеваем FPV очки и подключаем их к квадрокоптеру. Важно убедиться, что очки правильно откалиброваны и обеспечивают четкое изображение
- Медленно двигаем квадрокоптер вдоль стороны квадрата. Сохраняя постоянную скорость и высоту.
- Когда квадрокоптер достигнет угла квадрата, делаем плавный поворот на 90 градусов. Используем стики управления для точной настройки траектории.
- Повторяем 2 предыдущих шага для оставшихся 3 сторон.
- Начинаем с небольшого квадрата и постепенно увеличиваем его размер по мере освоения навыка.
- Для посадки устанавливаем стики Roll, Pitch, Yaw в центральное положение, осторожно опускаем стик Throttle.
- Когда дрон достигнет земли переводим в состояние DISARMED, переключив переключатель, закрепленный за 5 каналом, винты прекращают вращаться. Снимаем очки. Отключаем питание. Отключаем пульт. Отключите пульт.
Полёт «Волна»
Задачей данного кейса, научиться выполнять плавный и контролируемый полет волной.
Полет волной - это маневр управления квадрокоптером, в котором он движется по плавной синусоидальной траектории, имитируя волнообразное движение. Это достигается путем скоординированного управления осями тангажа, крена и рыскания.
Полет волной - это продвинутый маневр, который требует высокого уровня навыков управления. Он используется в различных приложениях, таких как аэрофотосъемка, кинематография и гонки на дронах. Овладение полетом волной повышает общую уверенность пилота в управлении квадрокоптером и позволяет выполнять более сложные маневры.
Полёт «Волна» в симуляторе
Выбираем учебный FPV БПЛА.

В запущенной симуляции проверяем, чтобы пульт был включен и подключен, а все кнопки и переключатели на пульте находились в состоянии деактивации, стик Throttle опущен вниз. Если на пульте настроены только 4 канала, проверяем, чтобы клавиши не были случайно задеты все ползунки стоят в крайнем левом положении.
Переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, в это время у дрона закрутятся винты.
Установите стики Roll, Pitch, Yaw в центральное положение. Осторожно поднимаем Throttle вверх, пока дрон не поднимется на желаемую высоту. После стараемся задержаться на одной высоте, регулируя её стиком Throttle.
Переключаем стик на пульте, отвечающий за FlyMode, или нажимаем на соответствующую клавишу, тем самым, переведя дрон в режим ACRO.
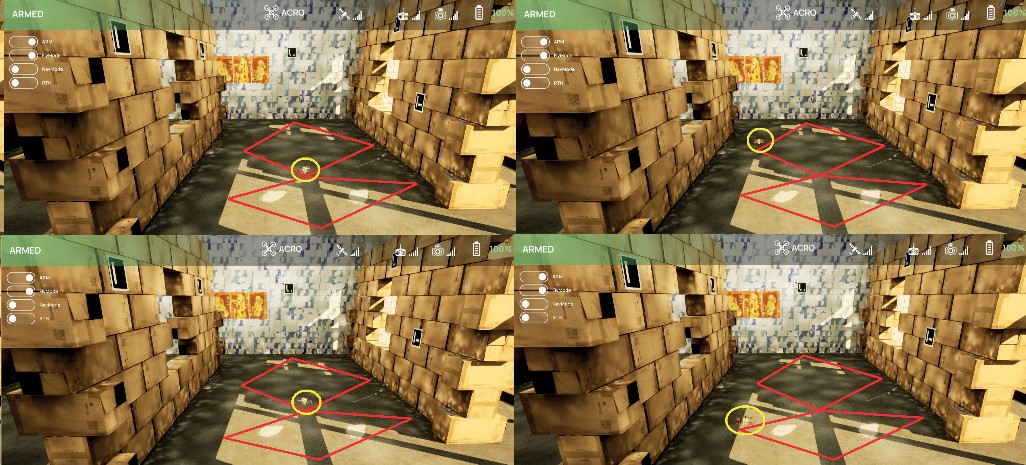
Переключаемся в FPV режим (Подробнее во вкладке «Настройки» → «Управление»). Управляя стиками Pitch, Roll, Yaw перемещаем дрон по заданной траектории. Высоту продолжаем регулировать стиком Throttle.
![[media/image105.png]]
После освоения данного маневра пробуем выполнить полет, подключив управление высотой.

Для посадки устанавливаем стики Roll, Pitch, Yaw в центральное положение, опускаем стик Throttle . Когда дрон достигнет земли, переводим в состояние DISARMED, переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, винты прекращают вращаться.
Полёт «Волна» в жизни
Для безопасных полетов рекомендуется выбирать площадки (полигоны), ограниченные сеткой. Обязательно проверяем окружающую обстановку и убеждаемся в том, что нет препятствий или людей поблизости. Надеваем специальные защитные очки. Убедимся, что батарея полностью заряжена. Проверяем пропеллеры на наличие повреждений и правильность установки.

Проверяем, чтобы все кнопки и переключатели на пульте находились в состоянии деактивации, а стик Throttle опущен вниз. Включаем пульт. Подключаем питание к дрону. После трех звуковых сигналов дрон готов к работе, если звуковые сигналы не прекращаются, то отключаем питание и проверяем схему подключения.
Устанавливаем дрон на полигоне и отходим на безопасное расстояние (около 4 метров).

Переключаем стик на пульте, отвечающий за 5 канал, тем самым, переведя дрон в режим ARM, в это время у дрона закрутятся винты.
Установите стики Roll, Pitch, Yaw в центральное положение. Осторожно поднимаем Throttle вверх, пока дрон не поднимется на желаемую высоту. После стараемся задержаться на одной высоте, регулируя её стиком Throttle. Переключаем стик на пульте, отвечающий 6 канал, тем самым переведя дрон в режим ACRO - режим в котором обычно летают на FPV дронах. Управляя стиками Pitch, Roll, Yaw перемещаем дрон по заданной траектории. Высоту продолжаем регулировать стиком Throttle.

После освоения данного маневра пробуем выполнить полет, подключив управление высотой.

Для посадки централизуем стики Roll, Pitch, Yaw, опускаем стик Throttle. Когда дрон достигнет земли переводим в состояние DISARMED, переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответ-
ствующую клавишу, винты прекращают вращаться.
Отключаем питание. Отключаем пульт.
Полёт «Волна» в FPV очках
При работе в очках повторяем все шаги из раздела “Полёт «Волна» в жизни”. **_Внимание! _**В FPV очках обзор ограничен, поэтому необходимо внимательнее относиться к движениям, которые совершаются. Рекомендуем придерживаться следующих этапов:
- Надеваем FPV очки и подключаем их к квадрокоптеру. Важно убедиться, что очки правильно откалиброваны и обеспечивают четкое изображение.
- Медленно двигаем квадрокоптер вперед по прямой линии. Сохраняя при этом постоянную скорость и высоту.
- Когда квадрокоптер достигнет точки поворота, делаем плавный поворот на 180 градусов. Используем стики управления для точной настройки траектории.
- Продолжаем двигаться назад по прямой линии, сохраняя постоянную высоту.
- Повторяем 2 предыдущих шага для чтобы завершить фигуру “Волна на одной высоте”.
- Продолжаем выполнять волны на одной высоте, пока не освоите навык.
- Для посадки устанавливаем стики Roll, Pitch, Yaw в центральное положение, осторожно опускаем стик Throttle.
- Когда дрон достигнет земли переводим в состояние DISARMED, переключив переключатель, закрепленный за 5 каналом, винты прекращают вращаться. Cнимаем очки. Отключаем питание. Отключаем пульт.
Маневрирование
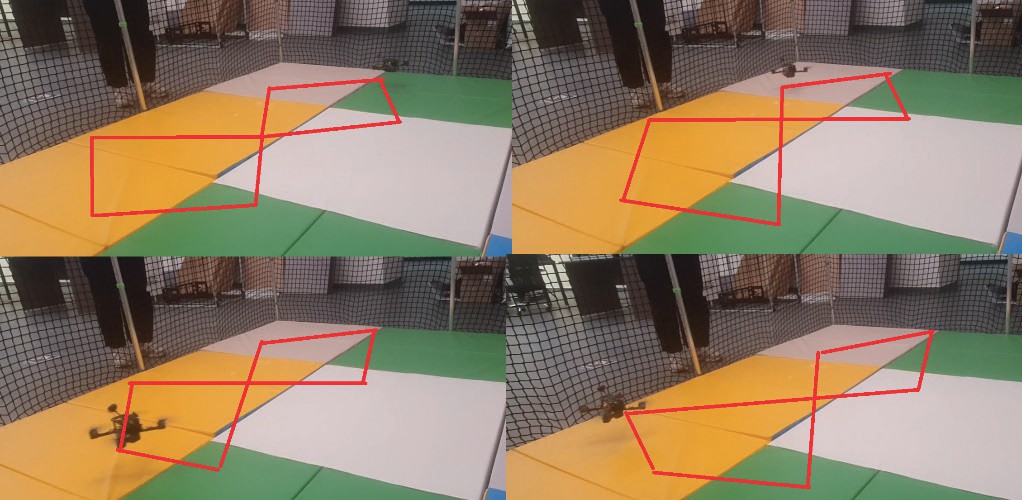
Задачей данного кейса заключается в пролете по траектории “Восьмерка”.
Полет по траектории “Восьмерка” это продвинутый маневр, который требует хороших навыков управления квадрокоптером. Он используется в различных приложениях, таких как аэрофотосъемка, инспекции и гонки на дронах. Овладение полетом по траектории “восьмерка” повышает общую уверенность пилота в управлении квадрокоптером и позволяет выполнять более сложные маневры.
Маневрирование в симуляторе
Выбираем учебный FPV БПЛА.

В запущенной симуляции проверяем, чтобы пульт был включен и подключен, а все кнопки и переключатели на пульте находились в состоянии деактивации, стик Throttle опущен вниз. Если на пульте настроены только 4 канала, проверяем, чтобы клавиши не были случайно задеты все ползунки стоят в крайнем левом положении.

Переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, в это время у дрона закрутятся винты.

Установите стики Roll, Pitch, Yaw в центральное положение. Осторожно поднимаем Throttle вверх, пока дрон не поднимется на желаемую высоту. После стараемся задержаться на одной высоте, регулируя её стиком Throttle.

Переключаем стик на пульте, отвечающий за FlyMode, или нажимаем на соответствующую клавишу тем самым переведя дрон в режим ACRO.
Переключаемся в FPV режим (Подробнее во вкладке «Настройки» → «Управление»). Управляя стиками Pitch, Roll, Yaw перемещаем дрон по заданной траектории. Высоту продолжаем регулировать стиком Throttle.
После освоения данного маневра пробуем выполнить полет, подключив управление высотой. Высоту всё так же продолжаем регулировать стиком Throttle.

Для посадки устанавливаем стики Roll, Pitch, Yaw в центральное положение, опускаем стик Throttle. Когда дрон достигнет земли переводим в состояние DISARMED, переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, винты прекращают вращаться.
Маневрирование в жизни
Для безопасных полетов рекомендуется выбирать площадки (полигоны), ограниченные сеткой. Обязательно проверяем окружающую обстановку и убеждаемся в том, что нет препятствий или людей поблизости. Надеваем специальные защитные очки.

Убедимся, что батарея полностью заряжена. Проверяем пропеллеры на наличие повреждений и правильность установки. Проверяем, чтобы все кнопки и переключатели на пульте находились в состоянии деактивации, а стик Throttle опущен вниз. Включаем пульт. Подключаем питание к дрону. После трех звуковых сигналов дрон готов к работе, если звуковые сигналы не прекращаются, то отключаем питание и проверяем схему подключения.
Устанавливаем дрон на полигоне и отходим на безопасное расстояние (около 4 метров).

Переключаем стик на пульте, отвечающий за 5 канал, тем самым, переведя дрон в режим ARM, в это время у дрона закрутятся винты. Установите стики Roll, Pitch, Yaw в центральное положение. Осторожно поднимаем Throttle вверх, пока дрон не поднимется на желаемую высоту. После стараемся задержаться на одной высоте, регулируя её стиком Throttle. Переключаем стик на пульте, отвечающий 6 канал, тем самым, переведя дрон в режим ACRO - режим, в котором обычно летают на FPV дронах. Управляя стиками Pitch, Roll, Yaw перемещаем дрон по заданной траектории. Высоту продолжаем регулировать стиком Throttle.

После освоения данного маневра пробуем выполнить полет, подключив управление высотой.
Для посадки централизуем стики Roll, Pitch, Yaw, опускаем стик Throttle Когда дрон достигнет земли переводим в состояние DISARMED, переключаем стик на пульте, отвечающий за ARM, или нажимаем на соответствующую клавишу, винты прекращают вращаться. Отключаем питание. Отключаем пульт.
Маневрирование в FPV очках
При работе в очках повторяем все шаги из раздела “Маневрирование в жизни”. В FPV очках обзор ограничен, поэтому необходимо внимательнее относиться к движениям, которые совершаются рекомендуем придерживаться этапам:
- Надеваем FPV очки и подключаем их к квадрокоптеру. Важно убедиться, что очки правильно откалиброваны и обеспечивают четкое изображение.
- Медленно двигаем квадрокоптер вперед по прямой линии. Сохраняя при этом постоянную скорость.
- Когда квадрокоптер достигнет точки поворота первой петли, делаем плавный поворот на 90 градусов. Используем стики управления для точной настройки траектории.
- Продолжаем двигаться по окружности петли, сохраняя постоянную скорость и высоту.
- Когда квадрокоптер завершит первую петлю, делаем плавный поворот на 180 градусов. Используя стики управления для точной настройки траектории.
- Продолжаем двигаться по второй петле восьмерки, сохраняя постоянную скорость и высоту.
- Когда квадрокоптер завершит вторую петлю, делаем плавный поворот на 180 градусов. Используя стики управления для точной настройки траектории
- Выравниваем квадрокоптер по прямой линии и возвращаемся в исходную точку.
- Повторяем 4 предыдущих шага, чтобы завершить полет.
- Для посадки устанавливаем стики Roll, Pitch, Yaw в центральное положение, осторожно опускаем стик Throttle.
- Когда дрон достигнет земли переводим в состояние DISARMED, переключив переключатель, закрепленный за 5 каналом, винты прекращают вращаться. Снимаем очки. Отключаем питание. Отключаем пульт.