Учебная ячейка на базе манипулятора ARM 95
Описание
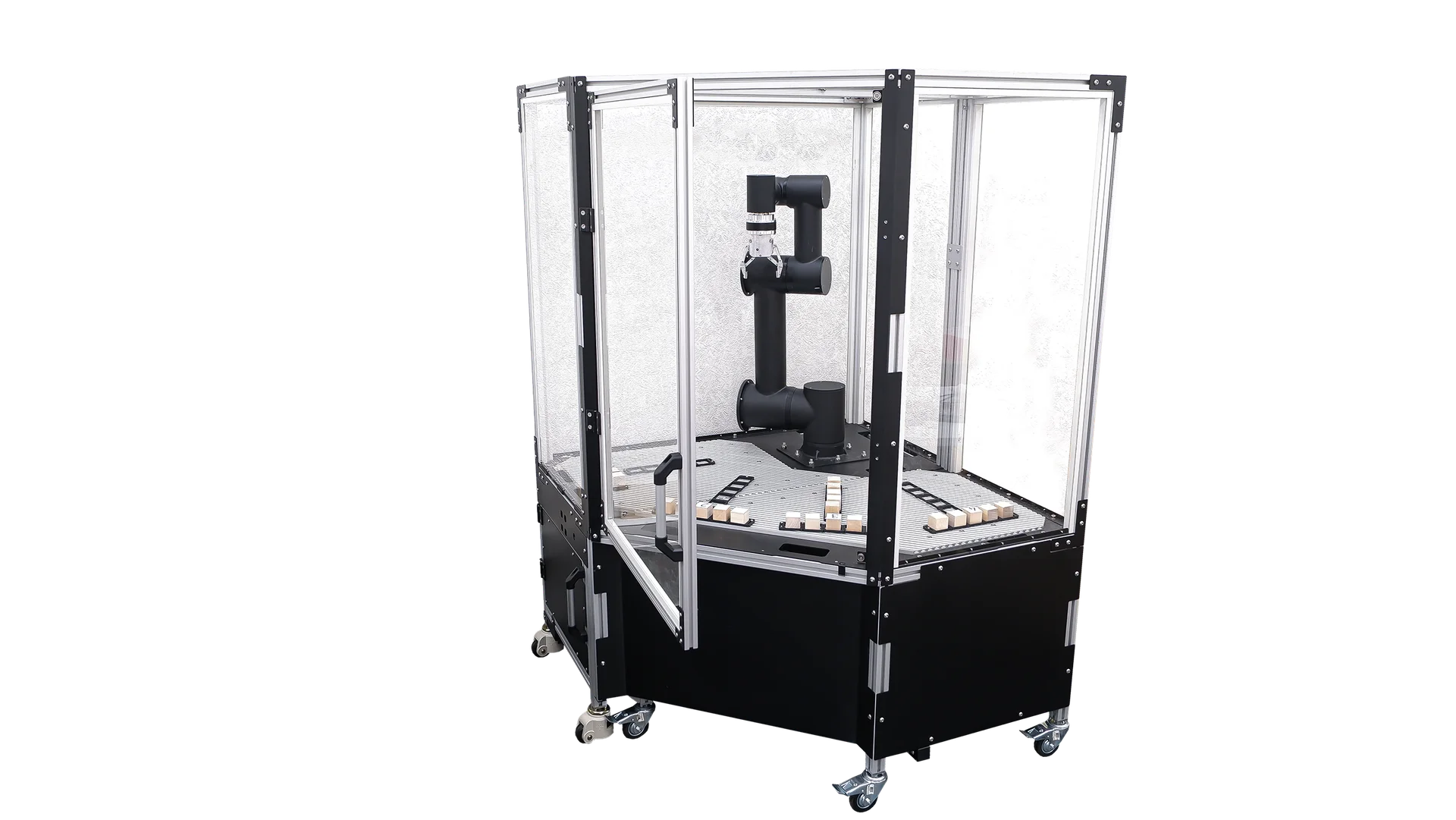
Учебная робототехническая ячейка на базе манипулятора ARM95 предназначена для практического обучения основам промышленной робототехники, автоматизации и программирования роботизированных систем. Комплекс позволяет организовать полноценное рабочее место для проведения лабораторных и практических занятий в образовательных учреждениях, учебных центрах и инженерных лабораториях.
Использование ячейки помогает учащимся познакомиться с принципами структурой и архитектурой систем управления для манипуляционных роботов, а также особенностями построения гибких производственных комплексов. Работа с комплексом позволяет получить практические навыки программирования и настройки робототехнического оборудования, поиска и устранения неисправностей, организации безопасной эксплуатации и интеграции отдельных компонентов в единую автоматизированную систему.
В зависимости от комплектации образовательная ячейка может использоваться для изучения систем технического зрения, управления периферийными устройствами, работы с различными типами захватных механизмов, а также разработки и реализации алгоритмов интеллектуального управления. Отличительной особенностью комплекса является модульная архитектура: пользователь может подключаться к каждому устройству отдельно, выполнять его настройку и программирование, а также использовать его как самостоятельный программно-аппаратный модуль вне общего сценария работы ячейки.
Прозрачное защитное ограждение ограничивает доступ к рабочей зоне и позволяет безопасно наблюдать за выполнением операций. Модульная конструкция обеспечивает возможность изменения конфигурации оборудования и расширения состава учебного комплекса. Мобильное основание на колёсных опорах упрощает перемещение ячейки и её размещение в учебной аудитории или лаборатории.
Технические характеристики манипулятора
| Параметр | Значение |
|---|---|
| Модель | Манипуляционный робот ARM-IMR-95 |
| Вес | 28 кг |
| Номинальная грузоподъёмность | 5 кг |
| Радиус рабочей зоны | 950 мм |
| Количество степеней свободы | 6 |
| Номинальное напряжение | 48 В |
| Максимальная скорость перемещения рабочего инструмента | 1 м/с |
| Диапазон вращения звеньев | 360°, 6 звеньев |
| Максимальная скорость вращения звеньев | 1–2-е звенья: 120°/с; 3–6-е звенья: 180°/с |
| Поддерживаемые протоколы связи | EtherCAT, UDP, Modbus, CANopen, RS-485 |
| Интерфейс передачи данных | EtherCAT |
| Интерфейс ввода-вывода | 5 дискретных входов, 5 дискретных выходов |
| Повторяемость | 0,05 мм |
| Программирование | Графический интерфейс, ROS 2, API Python/C++/JavaScript, UDP, WebSocket |
| Степень защиты оболочки | IP54 |
| Максимальная рабочая температура | 80 °C |
| Потребляемая мощность | 550 Вт |
| Материал | Сталь, алюминий |
| Гарантия | 1 год |
Состав комплекта
| Манипулятор ARM95 с блоком управления и комплектом сменных захватов | 1 шт | https://wiki.appliedrobotics.ru/manipulator/ARM-IMR-95/card.html |
|---|---|---|
| Пневматическая система | 1 шт | Компрессор, блок подготовки воздуха и комплект пневматических компонентов, обеспечивающих работу вакуумного захвата и других пневматических исполнительных механизмов. |
| Стойка с терминалом управления | 1 шт | Стойка с сенсорным дисплеем и одноплатным компьютером OrangePi 5B, предназначенная для запуска графического интерфейса MotionCore (системы управления манипулятором) и модулем сигнальной лампы |
| Модуль сигнальной лампы | 2 шт | https://wiki.appliedrobotics.ru/EDUCATION/RTK/smart_devices/card.html |
| Конвейерная линия | 1 шт | https://wiki.appliedrobotics.ru/EDUCATION/RTK/conveyor/card.html |
| Смарт-стереокамера AR-stereo | 1 шт | https://wiki.applied1robotics.ru/EVM/AR_STEREO/card.html |
| Смарт-стереокамера SVcam | 1 шт | https://wiki.appliedrobotics.ru/EVM/SVCAM/card.html |
| Смарт-камера TrackingCam3 | 1 шт | https://wiki.appliedrobotics.ru/EVM/TC3/card.html |
| Программно-аппаратный модуль программирования и управления устройствами робототехнической ячейки | 1 шт | Модуль программирования и управления периферийными устройствами представляет собой программно-аппаратный комплекс, состоящий из одноплатного компьютера OrangePi5B и интерфейсного контроллера DXL-IoT (https://wiki.appliedrobotics.ru/EVM/DXLIOT/card.html) |
Полезные ссылки
