Модуль стереозрения SVCAM
Описание
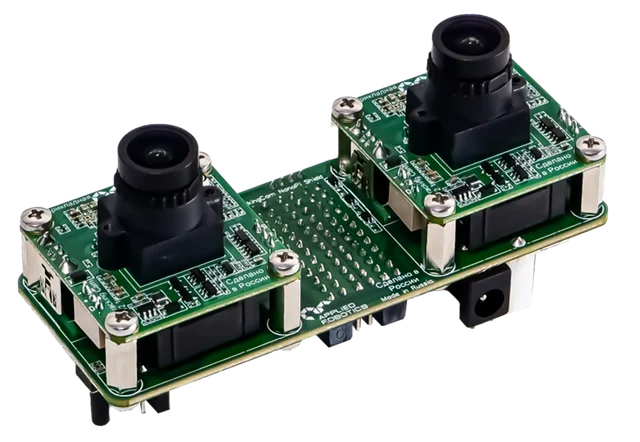
Модуль SVCAM – система технического зрения производства компании ООО «Прикладная робототехника» , является сенсорным устройством для исследования окружающего пространства путем обработки и анализа изображения со встроенной видеокамерой. Представляет из себя установку, состоящие из двух камер для съемки и микрокомпьютера для обработки данных. Основная цель модуля SVCAM – это определение расстояния до объектов, т.е. видеть глубину. Устройство формирует объёмное (трёхмерное) изображение сцены — это основа зрения в роботах, дронах, автомобилях и системах безопасности.
Основные элементы модуля
| Наименование | Значение | Ед. изм. |
|---|---|---|
| Модуль стереозрения, представляющий собой модульное устройство на основе микрокомпьютера, периферийного контроллера и интегрированных модулей технического зрения | 1 | шт. |
| Модуль стереозрения обеспечивает формирование массива данных дальномера о расстоянии до ближайших поверхностей окружающих объектов, находящихся в диапазоне действия | Наличие | |
| Встроенный опциональный микрокомпьютер | Наличие | |
| Встроенный интерфейс WiFi и Bluetooth | Наличие | |
| Встроенный модуль технического зрения | 2 | шт. |
| Количество вычислительных процессорных ядер | 4 | шт. |
| Тактовая частота процессорного ядра | 1,2 | ГГц |
| Оперативная память | 512 | МБ |
| Интерфейс USB для настройки модуля технического зрения | 1 | шт. |
| Разрешение видеопотока, передаваемого по интерфейсу USB | 640x480 | пикселей |
| Угол обзора в горизонтальной плоскости | 70 | угловых градусов |
| Угол обзора в вертикальной плоскости | 45 | угловых градусов |
| Число градаций цветовой палитры | 65535 |
Изображение, полученное с камер после обработки, называется стереоскопическим, а модуль – стереокамерой. Модуль SVCAM предназначен для работы в образовательном направление совместно с робототехническими системами. Основные функции устройства – распознавать и анализировать объектов по ряду признаков: цвету, размеру, расстоянию и форме. Распознавание по цвету происходит в спектре RGB, путем захвата волн, которые прошли через фильтр, путем интерполяции возникают и другие цветовые оттенки.
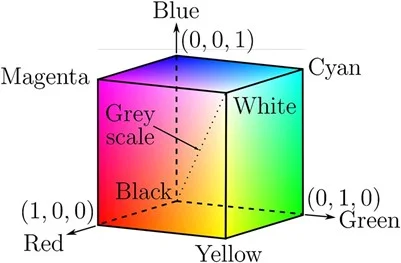
Модель RGB
В свою очередь, модуль SVCAM позволяет получать расстояние до объекта или глубину кадра .


Изображение со стереокамеры
Для этого используются алгоритмы, которые находят ключевые точки на изображениях, сделанных на каждой камере и при корректном совпадении массивов данных, находится глубина изображения
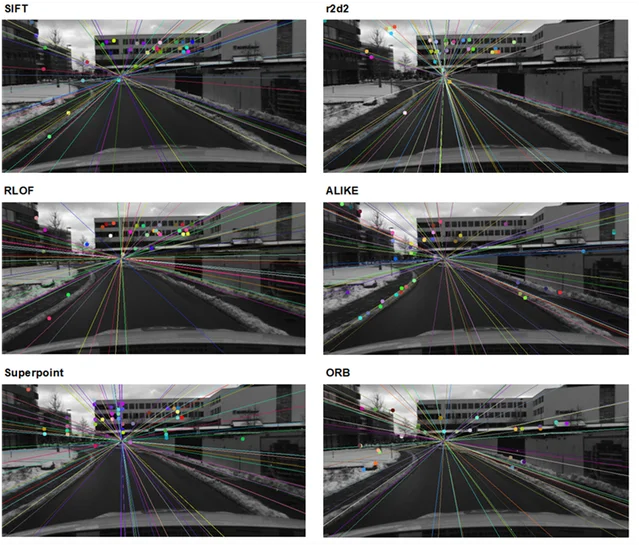
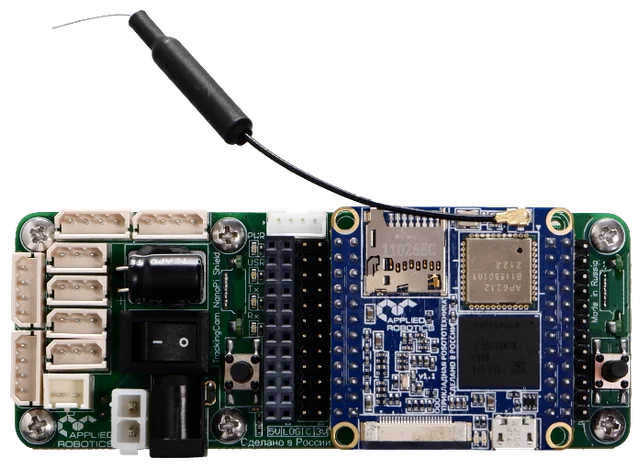
Алгоритмы поиска реперных точек
Для обработки данных с камер используется электронно-вычислительный модуль – NanoPi-AR. Он необходим для получения изображения глубины. Микрокомпьютер NanoPi-AR представляет собой встраиваемый одноплатный микрокомпьютер с размещенными на одной плате вычислительным процессором, оперативной памятью, блоком энергонезависимой памяти, а также набором беспроводных интерфейсов, таких как: Bluetooth и Wi-Fi. Микрокомпьютер NanoPi-AR является аналогом популярного микрокомпьютера NanoPi, производимого FriendlyArm, но выполненного с рядом улучшений и доработок. Производством микрокомпьютера NanoPi-AR занимается ООО «Прикладная робототехника». Причем, как его аппаратной частью, так и программной – для совместимости разрабатываемых решений компания также разрабатывает и поддерживает свою сборку операционной системы.
Технические характеристики микрокомпьютера следующие:
- Процессор: Allwinner H3, Quad-core Cortex-A7 Up to 1.2GHz
- Оперативная память: 512MB DDR3 RAM
- Встроенная энергонезависимая память: 8GB eMMC
- WiFi: 802.11b/g/n
- Bluetooth: 4 dual mode
- Интерфейс DVP камеры: 0.5mm pitch 24 pin FPC seat
- Интерфейс MicroUSB: OTG and power input
- Разъем для подключения MicroSD карты: 1 шт
- Отладочный последовательный порт: 4Pin,2.54mm pitch pin header
- Линии GPIO1: 2.54mm spacing 24pin,It includes UART,SPI,I2C,GPIO
- Линии GPIO2: 2.54mm spacing 12pin,It includes USBx2,IR,SPDIF,I2S
- Габариты: 40 x 40 мм
- Количество слоев печатной платы: 6
- Требуемое питание: DC 5V/2A
- Диапазон рабочих температур: от -20 ⁰С до 70 ⁰С
- Поддержка ОС: u-boot, UbuntuCore, eflasher, YoctoBased Linux Kernel5.16