Полетный драйвер моторов четырехканальный
Еще одно важное устройство в системе управления беспилотным летательным аппаратом – это четырехканальный полетный драйвер моторов. Он предназначен для многофункционального управления моторами. Его основными функциями являются:
- Управление скоростью вращения моторов.
- Изменение направления вращения моторов.
- Предотвращение перегрузок и коротких замыканий.
Драйвер работает путем подачи соответствующих сигналов на разъемы (подробнее в разделе 1.3.1). Эти сигналы задают уровень скорости и направление вращения каждого мотора. Драйвер имеет четыре канала, что позволяет управлять четырьмя моторами независимо друг от друга.Каждый канал драйвера имеет свои командные входы для управления скоростью и направлением вращения мотора. После, используя конфигуратор полетного контроллера, можно проверить работу моторов (подробнее в подразделе 5.4.5).Распиновка четырехканального полетного драйвера моторов представлена на рисунке 1.3.
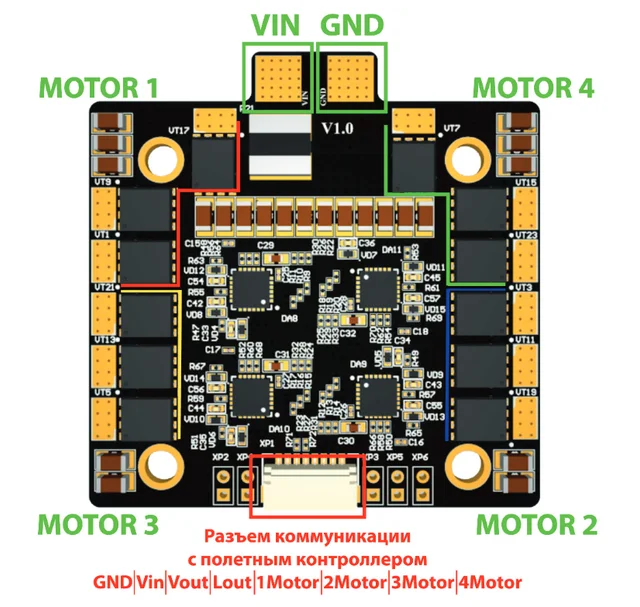
Рис. 1.3. Распиновка драйвера мотора
Драйвер мотора содержит:
- Выходы для подключения фаз каждого мотора;
- Выход VIN в верхней части платы подключается к проводу питания батареи;
- Выход GND в верхней части платы подключается к проводу земли батареи.