Полетный контроллер AirC
Полетный контроллер - это электронное устройство, которое отвечает за управление и стабилизацию беспилотного летательного аппарата(БПЛА). Он получает данные с различных датчиков, обрабатывает их и отправляет команды на двигатели, рули и другие устройства управления, чтобы обеспечить плавный и контролируемый полет.Одним из ключевых компонентов полетного контроллера является инерциальный измерительный блок (IMU), который обычно включает в себя:
- Акселерометр: Измеряет линейное ускорение летательного аппарата по трем осям (x, y и z).
- Гироскоп: Измеряет угловую скорость летательного аппарата потрем осям (крен, тангаж и рыскание).
- Барометр: Измеряет атмосферное давление, что помогает определить высоту летательного аппарата.
Эти датчики предоставляют полетным контроллерам информацию о текущем положении, ориентации и движении летательного аппарата. Полетный контроллер использует эту информацию для расчета необходимых корректировок управления, чтобы летательный аппарат оставался в стабильном полете и следовал желаемой траектории. Полетный контроллер обладает несколькими выходами для подключения комплектующих дрона и периферийных устройств (модулей и датчиков). Расположение каждого разъема на плате контроллера и назначение пинов в этих разъемах показывает распиновка, представленная в виде схемы на рисунке 1.2.
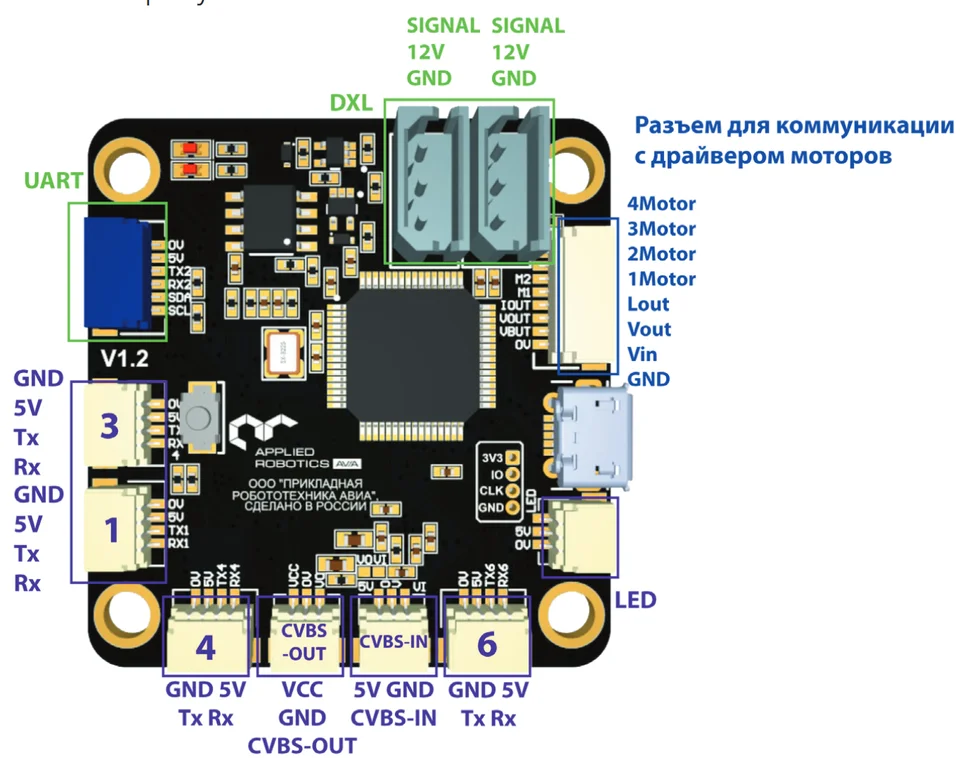
Рис. 1.2. Распиновка полетного контроллера
Полетный контроллер содержит:
- Разъем DXL - два трехпиновых разъема типа Molex, содержащих в себе линии GND (земля), 12V (питание), SIGNAL (линия данных). Используются для подключения модулей по интерфейсу Dynamixel, как в одиночном виде, так и в составе цепи устройств.
- Разъем UART2 - один шестипиновый разъема типа JST, содержащих в себе линии:
- GND - линия земли;
- 5V - линия питания, на которую можно подать напряжение 5В;
- Tx - передающая линия UART-интерфейса;
- Rx- принимающая линия UART-интерфейса;
- SDA - линия передающая данные;
- SCL - линия служит для тактирования между полетным контроллером и подключенным устройством.
- Разъемы UART1, UART3, UART4, UART6 - четырехпиновые разъемы типа JST, содержащих в себе линии:
- GND - линия земли;
- 5V - линия питания, на которую можно подать напряжение 5В;
- Tx - передающая линия UART-интерфейса;
- Rx - принимающая линия UART-интерфейса.
- Разъем коммуникации с драйвером моторов - один восьмипиновый разъем типа JST, содержащий в себе линии:
- 4 motor - линия подключения мотора No4;
- 3 motor - линия подключения мотора No3;
- 2 motor - линия подключения мотора No2;
- 1 motor - линия подключения мотора No1;
- Lout - выходной ток;
- Vout - выходное напряжение;
- Vin - линия входного напряжения, принимающая 12В;
- GND - линия земли.
- Разъем CVBS-OUT - один трехпиновый разъем типа JST, содержащий в себе:
- 5V - линия питания, на которую можно подать напряжение 5В;
- GND - линия земли;
- CVBS-OUT - аналоговый видеовыход.
- Разъем CVBS-IN - один трехпиновый разъем типа JST, содержащий в себе:
- VCC - линия питания, которая может выдавать 9В;
- GND - линия земли;
- CVBS-IN - аналоговый видеовход.
- Разъем LED - один трехпиновый разъем типа JST, содержащий в себе:
- LED - аналоговый вход для подключения светодиодной ленты;
- 5V - линия питания, на которую можно подать напряжение 5В;
- GND - линия земли.