Учебно-лабораторный комплект "Учебный манипулятор с «Delta»-кинематикой"
Описание
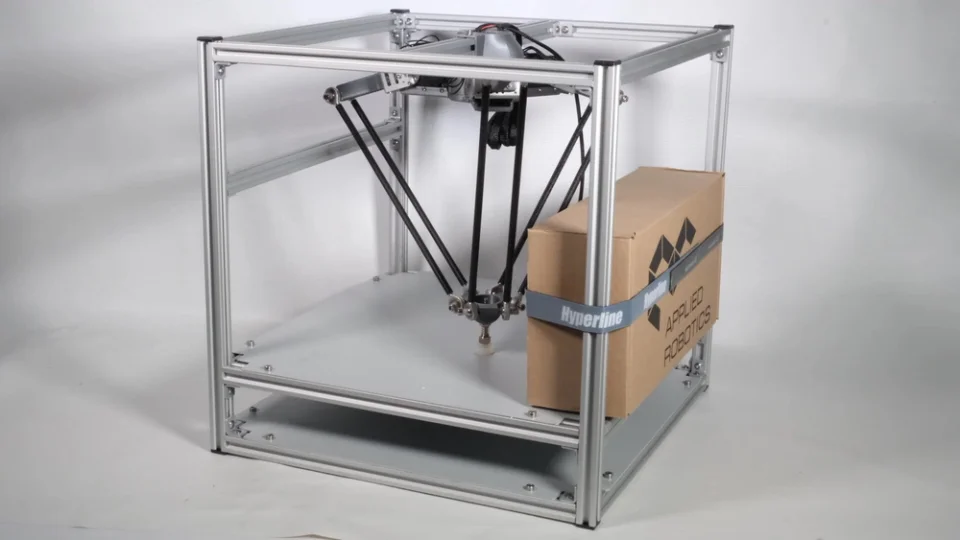
Учебно-лабораторный РТК реализован на основе комплектующих, применяемых в профессиональных сферах робототехники и представляет собой блочно-модульный конструктор для разработки макетов гибких производственных линий. Благодаря этому учащиеся могут на практике изучать основные принципы проектирования промышленных робототехнических комплексов и их систем управления, а также разрабатывать собственные проекты различных робототехнических систем промышленного назначения.
Видеообзор комплекта
Нажмите чтобы развернуть видео
Технические особенности:
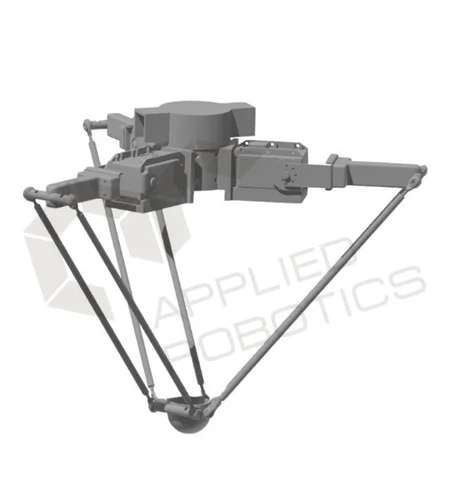
- Длина тяги “Delta” механизма – не менее 200 мм.
- Кол-во тяг – не менее 3.
- Сервомодуль Dynamixel: МХ-64Т – 3 шт.
- Программируемый контроллер STEM Board c возможностью встраивания модулей расширения:
- Программируемый контроллер OpenCM – наличие,
- Встраиваемый одноплатный микрокомпьютер – наличие.
- Модуль стереозрения SVCam.
- Модуль пневматического захвата – не менее 1 шт.
- Сетевой адаптер для питания от сети 220В.
- Интерфейсный кабель для программирования.
- Упаковка – деревянный бокс для транспортировки.
- Гарантия – 6 месяцев.
Учебно-лабораторный комплект предназначен для разработки гибких модульных автоматизированных линий на основе манипуляционных РТК, устанавливаемых над конвейерными линиями. Манипуляционные РТК с “Delta” – кинематикой, как правило, применяются в задачах упаковки и сортировки продукции, перемещаемой с помощью конвейерных линий.
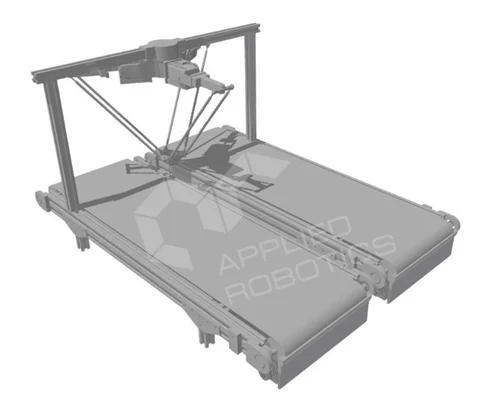
(на изображении представлен пример производственной ячейки, выполненной из нескольких автоматизированных линий и манипулятора с "Delta"-кинематикой)
Программирование учебно-лабораторных РТК может осуществляться в блочно-модульной среде программирования для начинающих разработчиков, в эмуляторе промышленной среды программирования для специалистов в области промышленной автоматизации, среде LabView, а также в среде ROS и редакторе скриптов языка Python для разработчиков алгоритмов управления.
Управление манипуляционным РТК может осуществляться с помощью программируемого контроллера, а также посредством облачных сервисов . Таким образом, данный комплект является совместимым с моделями учебных манипуляторов, используемых в рамках компетенции «Интернет вещей» при разработке макетов «умных» автоматизированных фабрик.


