Глава 2. Особенности системы, подготовка к работе
2.1. Зарядка компонентов стенда
Перед запуском стенда требуется полностью зарядить приёмопередатчики, контроллер и аккумуляторы для дрона и пульта. На каждом элементе стенда есть разъем «USB Type-C» для подключения провода. Каждый элемент стенда потребляет 5В. Для зарядки компонентов стенда требуется выключение всех приёмопередатчиков, блока питания. Если они включены, то выключаются длинным нажатием.
Зарядка блока питания
- Для зарядки блока питания, требуется отсоединить от блока питания все провода ведущие от приемопередатчиков и экрана если до этого они были подключены к блоку питания.
- В нижней части блока питания на панели управления находится выход «USB Type-C». Устанавливаем кабель в разъем, другой конец кабеля подключаем в адаптер питания и в розетку.
При зарядке блока питания с подключенным экраном, экран загорается, но его можно отключить, отсоединив кабель от блока питания. При отключении питания от сети система перезагрузится. Допускается работа стенда при питании от сети, но перед этим все комплектующие стенда должны быть полностью заряжены.
Зарядка приёмопередатчиков
- Для зарядки приемопередатчиков требуется отсоединить от блока питания провод ведущий к адаптеру и розетке. Отсоединить провод ведущий к экрану.
- Подключаем в разъемы передатчиков кабель «USB Type-C». Другой конец кабеля USB вставляем в блок питания на панели управления.
Зарядка аккумулятора квадрокоптера
- Аккумулятор отключаем от квадрокоптера.
- Подключаем к специальному блоку питания, входящим в состав комплекта.
- Индикатор изменит цвет на зеленый, когда аккумулятор полностью зарядится.
2.2. Включение стенда
Шаг 1. Включаем приёмопередатчики стенда. Включаем три приёмопередатчика расположенные на трех осях стенда (XYZ). Важно обратить внимание, что приёмопередатчики имеют светодиодный индикатор, проверьте загорелись ли они. Если не будет включен хотя бы 1 из датчиков, синхронизации не произойдёт. После зарядки блока питания переключаем питание с блока от сети на питание контроллера. Для этого конец кабеля USB подключаем к блоку питания, а USB Type-C к контроллеру.
Шаг 2. Включаем блок питания. Коротко нажимаем на «Кнопку питания». В это же время загорится экран, а над кнопкой питания загорятся светодиоды – один красный и 3 зеленых, что соответствует полному заряду. Длинным нажатием он выключается. Если после включения экран загорается и гаснет, а светодиоды загораются и гаснут, то блок питания панели управления разряжен.
Шаг 3. Проверяем подключение приёмопередатчика к комплексу. Для этого на экране выбираем вкладку «Настройки» и информационное поле «Герконы по осям». После этого вручную перемещаем выключенный квадрокоптер по всем осям. Если значения изменяются, то приемопередатчики работают исправно. Если положение по всем осям верное, то можно включать следующий стенд.
Внимание! Комплект стендов лучше включать по очереди для предотвращения непредвиденных ситуаций.
Шаг 4. Включаем пульт управления.
Внимание! Пульт и квадрокоптер сразу подключены друг к другу и дополнительной настройки не требует. Перед включением пульта убеждаемся, что все тумблеры (SwA/SwB/ SwC/SwD) в верхнем положении. Левый джойстик «Throttle» (газ) опущен в крайнее нижнее положение.
Шаг 5. Включаем пульт.
Шаг 6. Подаем питание на квадрокоптер. Выравниваем дрон. Устанавливаем его в строго горизонтальное положение, закрепляем аккумулятор ремешком, вставляем в разъем дрона разъем аккумуляторной батареи. После подачи питания требуется фиксация дрона в горизонтальном положении около 30 секунд.
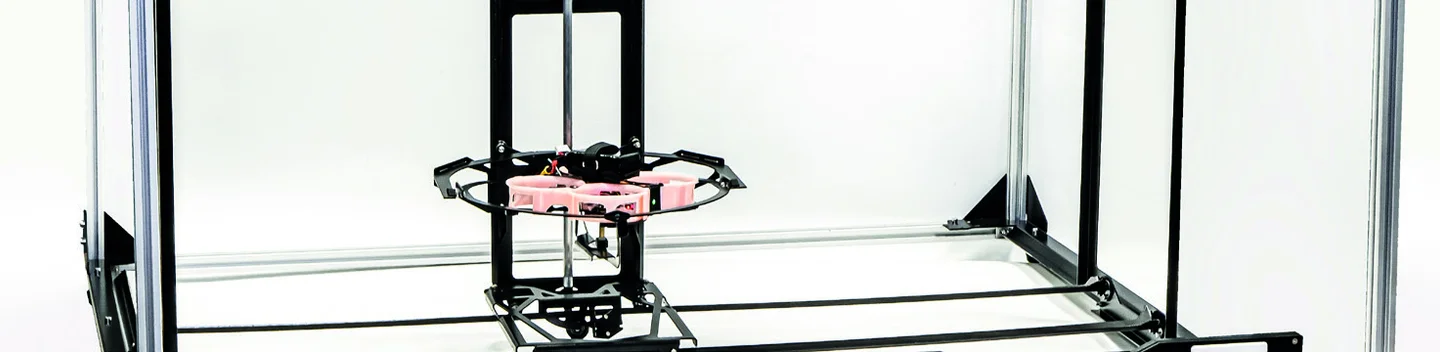
Выравнивание дрона
Прикрепленный дрон
Шаг 7. Запуск квадрокоптера. Удерживая дрон в ровном горизонтальном положении, переводим дрон в состояние «ARM». Для этого тумблер «SwA» опустить вниз (на себя). В случае если винты не закрутились, отключите и заново подайте питание на дрон, удерживая его в ровном положении. Тумблер «SwA» отвечает за режим «ARM» и «DISARM». Тумблер «SwВ» отвечает за режим полета. Если тумблер в состоянии 1 (вверх), то активирован режим «ACRO». Если тумблер в состоянии 2 (вниз), то в режиме «STABILIZE».
Внимание! Учитывайте, что время полета от одного аккумулятора зависит от маневров, резкости движений, режима полета. Используйте аккумулятор, заряженный на 100%. Для каждой новой полетной миссии или задания меняйте аккумулятор.

Переход в настройки
Если один или несколько приёмопередатчиков не отображаются.
- Переходим в «Настройки» ---> «Настройка датчиков».
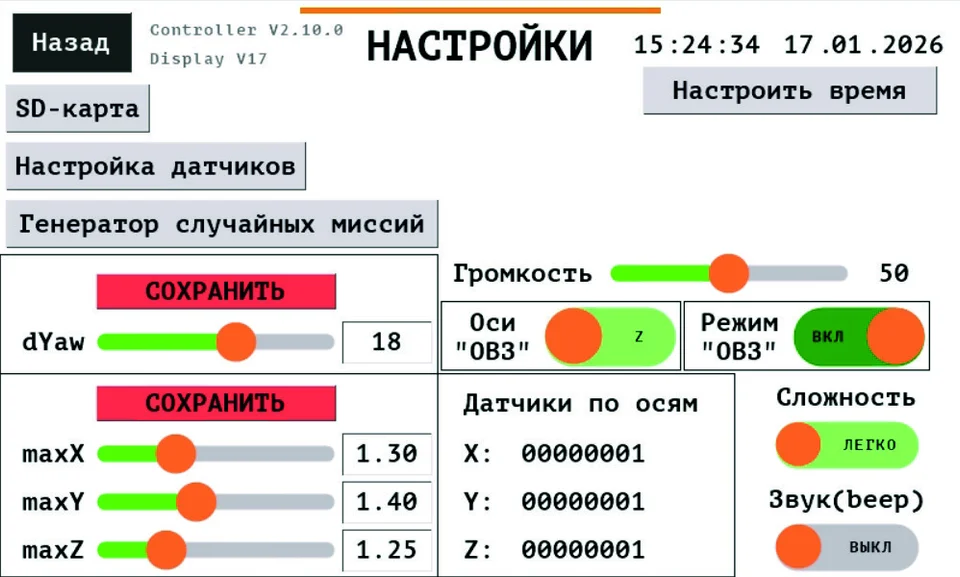
Настройки
В левом поле отображаются подключенные датчики. Если поле пустое, то перезагружаем стенд.
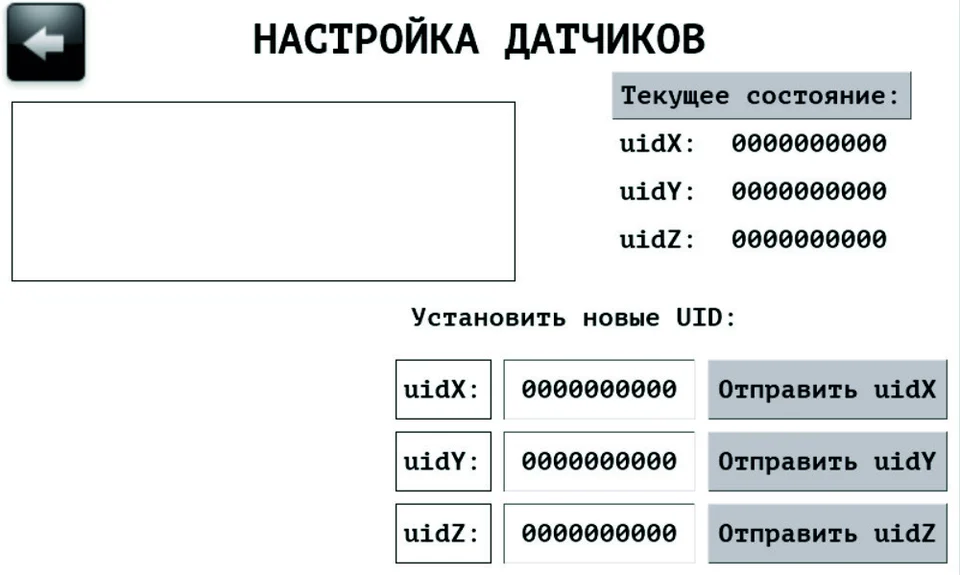
Настройка датчиков
- Нажимаем на «Текущее состояние» и проверяем информацию левой и правой части экрана, она должна содержать одинаковые числа (номера приёмопередатчиков). Если числовые значения не совпадают, то перемещаем квадрокоптер по осям и проверяем, где меняются значения.
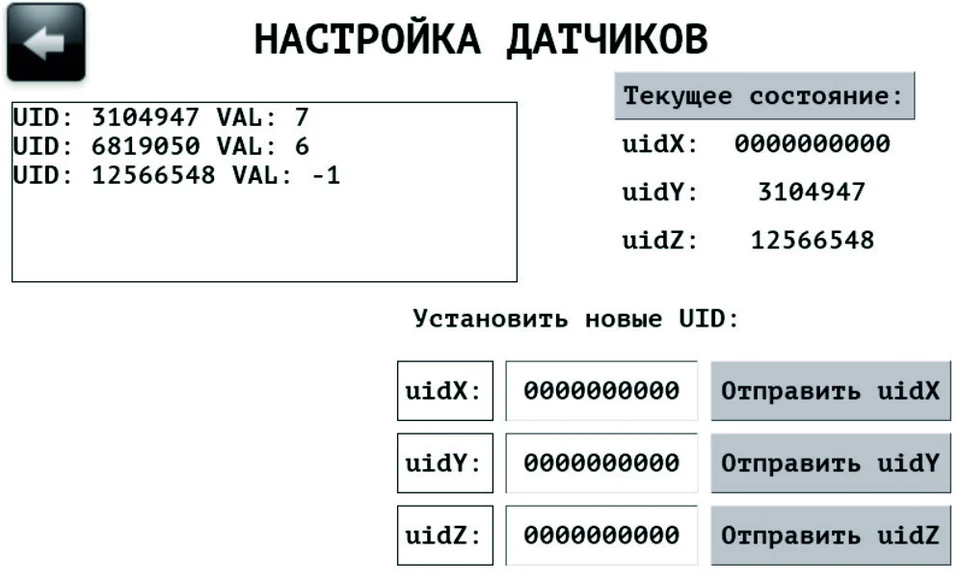
Текущее состояние
- Нажимаем «Поле ввода» соответствующей оси и вводим ID датчика из левой части, где значения менялись. Нажимаем «ОК» и «Отправить UID». Повторяем для всех осей, где значения ID не совпадают.

Значения ID
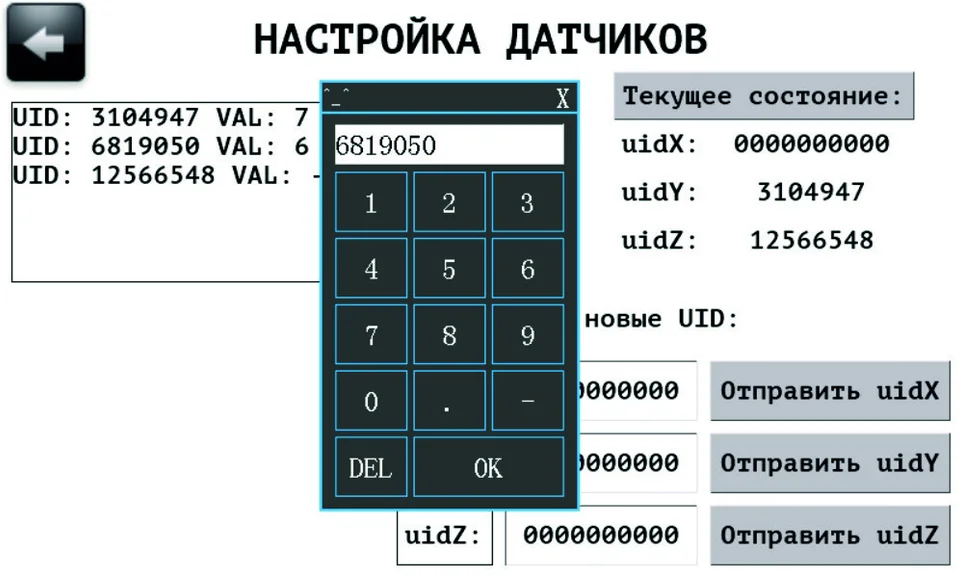
Ввод ID
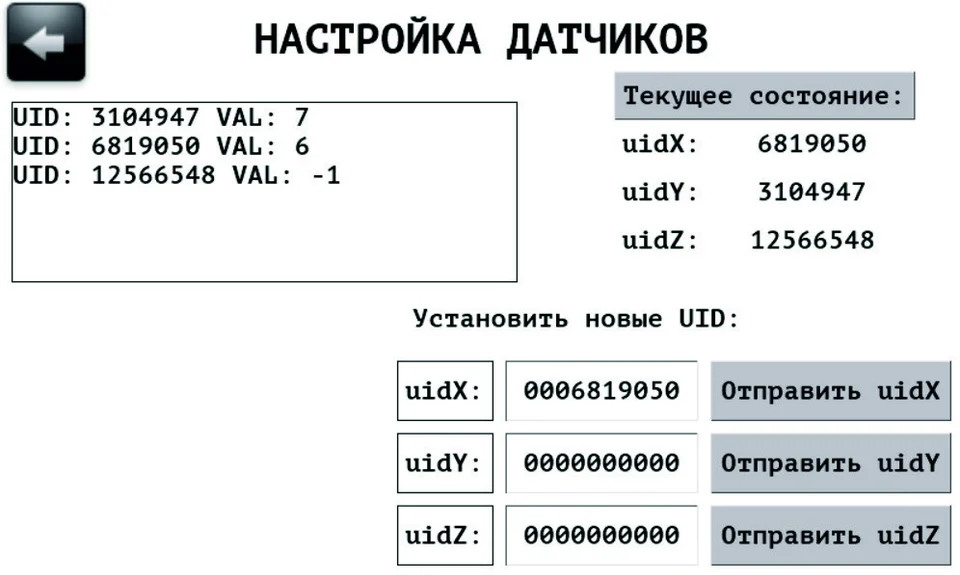
Новые ID
2.3. Переподключение пульта управления
Этот раздел описан для случаев нарушения подключения дрона с пультом управления. Внимание! Начальная настройка или подключение пульта управления к дрону не требуется!
- Включите пульт управления и подключите аккумуляторную батарею к квадрокоптеру.
В случае, если при подключении аккумулятора к дрону индикатор на приемопередатчике дрона стабильно горит красным, то синхронизация с пультом управления установлена и пульт подключен.
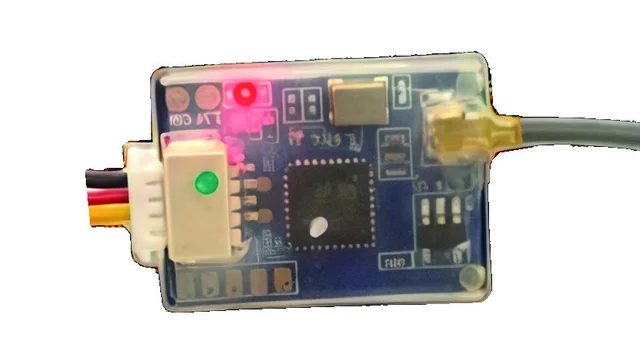
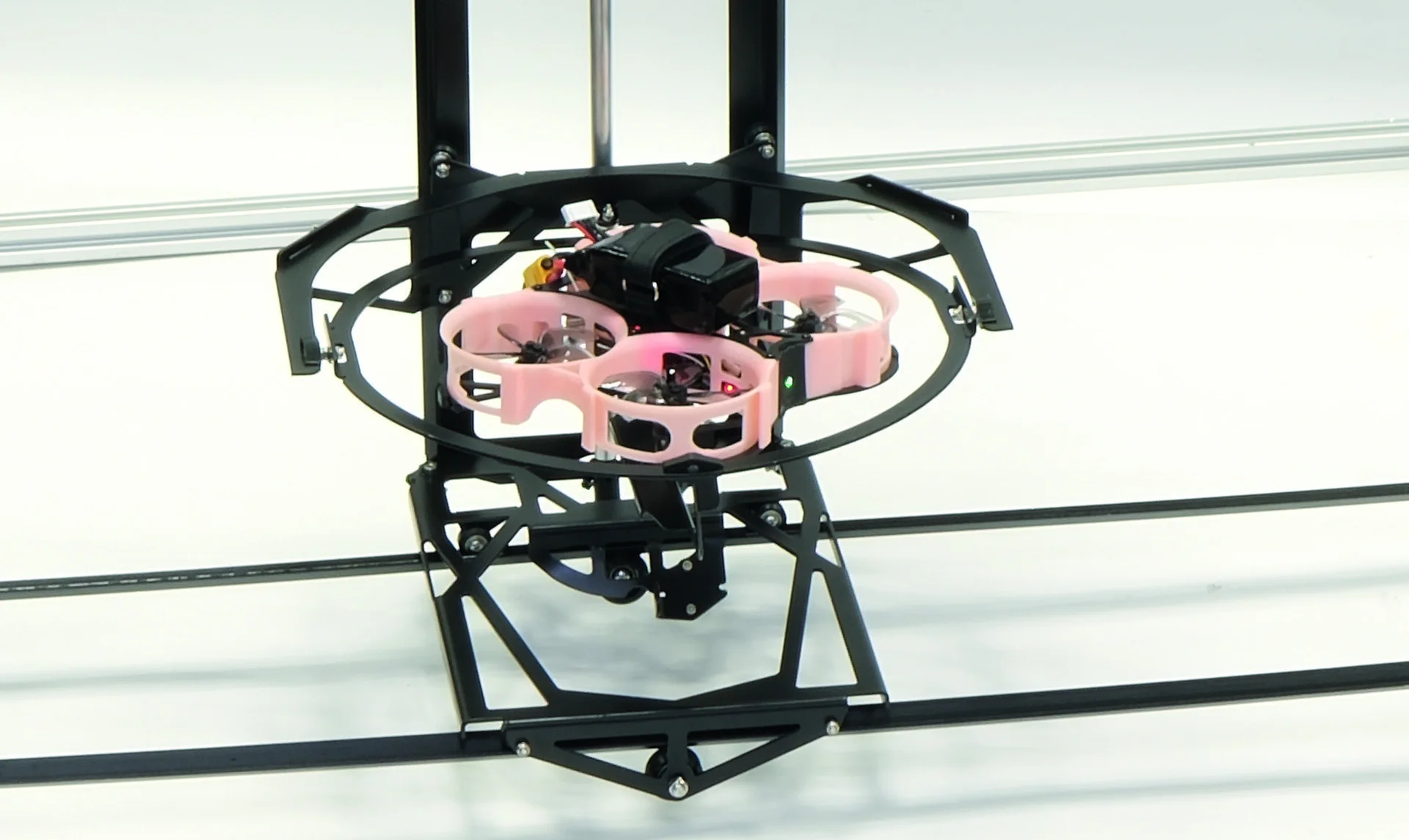
Приемопередатчик
Если при подключении аккумулятора к дрону индикатор на приемопередатчике дрона медленно мерцает красным, то это означает, что пульт управления квадрокоптером не подключен.
Переподключение пульта управления к квадрокоптеру
Шаг 1. Выключаем пульт и отключаем питание квадрокоптера.
Шаг 2. Зажимаем кнопку «BIND» на приемнике установленном на дроне. Удерживая её нажатой подаем питание на дрон. После подачи питания индикатор на приемнике начнет быстро мигать красным.
Шаг 3. Зажимаем кнопку «BIND» на пульте управления и включаем его.

Кнопка «BIND»
Шаг 4. Проверяем подключение. Если подключение пройдет успешно, то индикатор на приемопередатчике начнет мигать красным раз в секунду, индикации на пульте управления о синхронизации не будет.
Шаг 5. Отключаем сначала дрон, потом пульт.
Шаг 6. Включаем сначала пульт, потом дрон. Если индикатор приемника на дроне стабильно горит, то всё подключено.