Глава 5. Практическая часть
5.1. Правила безопасности
Беспилотные летательные аппараты (БПЛА), к которым относятся и мультикоптеры, являются источниками повышенной опасности и способны причинить серьёзные травмы, а также ущерб имуществу. Что, в свою очередь, может стать причиной привлечения оператора БПЛА, организатора занятий и других ответственных лиц к административной и уголовной ответственности, в соответствии с действующим законодательством. Внимательно прочтите и запомните приведённые ниже правила — их соблюдение является необходимым условием успешной и безаварийной эксплуатации мультикоптера, бортового и наземного оборудования, а также вашей собственной безопасности и безопасности окружающих.
Внимание! Приступая к эксплуатации БПЛА и его компонентов, вы подтверждаете, что внимательно прочли все перечисленные ниже пункты, понимаете их смысл и готовы их ответственно соблюдать.
- Перед началом эксплуатации мультикоптера ознакомьтесь с действующими законодательными нормами в части порядка и получения разрешения на использование воздушного пространства, регистрации и учёта БПЛА и неукоснительно соблюдайте их.
- Перед первым включением убедитесь в правильности сборки мультикоптера, отсутствии коротких замыканий и целостности проводки. Помните, что несоблюдение этого пункта может привести к пожару.
- Перед каждым полётом проверяйте мультикоптер и все его детали и элементы конструкции на целостность: они не должны иметь механических повреждений.
- Перед выполнением первого полёта убедитесь, что вы внимательно изучили настоящее методическое пособие, поняли все приведённые в нём указания и рекомендации и готовы их ответственно соблюдать.
- Сборка и эксплуатация мультикоптера лицами, не достигшими 18 лет, должна осуществляться под присмотром компетентных и ответственных взрослых.
- Запрещено обслуживание, включение и управление БПЛА в состоянии алкогольного и наркотического опьянения.
- Запрещены полёты БПЛА вблизи линий электропередач, радиолокационных станций и других источников сильного электромагнитного излучения.
- Запрещено присутствие свободно передвигающихся домашних животных и людей в местах полётов БПЛА.
- Полёты БАС на открытых площадках разрешено выполнять при ветре не более 5 м/с.
- При выполнении полётов в помещении необходимо наличие защитной сетки с размером ячейки менее размера мультикоптера между местом выполнения полёта и зрителями и другими лицами. Рекомендуется использование куба с длиной стороны от 3 метров.
- Перед проведением полета всегда проводите предполетную подготовку.
- Всегда сначала включайте передатчик системы радиоуправления, затем подключайте силовой аккумулятор мультикоптера;
- Во время включения мультикоптера убедитесь, что расстояние между ним и передатчиком системы радиоуправления составляет более одного метра.
- Устанавливайте мультикоптер на точку взлета носом от оператора;
- Не подключайте аккумулятор с закрепленными пропеллерами вне зоны полета. Если есть необходимость в подключении аккумулятора вне зоны полета, сначала снимите пропеллеры.
- Перед проверкой работоспособности мультикоптера отойдите от него на расстояние не менее двух метров, установите дрон носом от оператора. В процессе выполнения полёта не допускайте нахождение БПЛА на расстоянии менее двух метров от вас и других людей до момента выключения двигателей.
- Остерегайтесь вращающихся деталей БПЛА, таких как воздушные винты. Помните, что они могут стать причиной серьёзных травм, в том числе опасных для жизни.
- При полётах БПЛА визуально (без FPV оборудования) разрешено нахождение зрителей и других лиц только за спиной оператора. В этом случае мультикоптер находится в воздухе строго перед оператором.
- При полётах на дальние расстояния, в том числе в автоматическом режиме, запрещается нахождение зрителей и других лиц на траектории полёта БПЛА.
- Прежде чем подходить к мультикоптеру как в случае его падения, так и после штатной посадки и брать его в руки, убедитесь, что электродвигатели выключены и их случайный запуск невозможен.
- Выключайте передатчик системы радиоуправления только после выключения мультикоптера.
- При эксплуатации БПЛА, в первую очередь, руководствуйтесь здравым смыслом и принимайте решения, соответствующие конкретной обстановке.
Правила техники безопасности при хранении, транспортировке и эксплуатации аккумуляторов В составе комплекта квадрокоптера и его оборудования могут использоваться литиевые аккумуляторы типов LiPo, LiIon, LiFe и LiHV. Все они относятся к литиевым и при неправильном обращении могут стать причиной пожара, взрыва и серьёзных травм, в том числе, опасных для жизни. Квадрокоптер комплектуется аккумуляторной батареей. Для зарядки необходимо использовать только специальный адаптер и кабель, входящие в официальный комплект поставки.
Внимание! Приступая к эксплуатации аккумуляторов, вы подтверждаете, что внимательно ознакомились с приведёнными ниже требованиями, понимаете их смысл и готовы их соблюдать.
Общие требования безопасности при работе с литиевыми аккумуляторами
- Изучите и соблюдайте действующие нормы по хранению и транспортировке литиевых аккумуляторов.
- Храните аккумуляторы в прочных, несгораемых ёмкостях, в сухом и хорошо проветриваемом помещении.
- Не допускайте короткого замыкания. Запрещён контакт разъёмов с металлическими предметами.
- Не используйте аккумуляторы с механическими повреждениями, вздутием или подозрительным запахом. Проводите осмотр перед каждым использованием.
- Утилизируйте использованные аккумуляторы в соответствии с федеральным и местным законодательством.
- Электролит обладает сильным коррозийным действием. При попадании на кожу или в глаза немедленно промойте водой и обратитесь к врачу.
- Не подвергайте аккумуляторы воздействию открытого огня, нагреву, влаге, статическому или электромагнитному полю.
- Не разбирайте, не прокалывайте и не деформируйте аккумуляторы.
Зарядка аккумулятора
- Используйте только зарядное устройство и кабели из комплекта поставки или одобренные производителем.
- Убедитесь, что зарядное устройство поддерживает нужный тип аккумулятора и выбран правильный режим зарядки. Несовместимые устройства или режимы могут привести к взрыву или пожару.
- Для начала зарядки подключите батарею балансировочным разъемом в подходящий разъем на зарядном устройстве. Индикатор «LiPo» изменит цвет на красный. Когда аккумулятор будет заряжен, индикатор изменит цвет на зеленый.
- Не заряжайте аккумулятор без присмотра. При вздутии или перегреве немедленно прекратите зарядку и поместите батарею в огнеупорную ёмкость.
- Заряжайте только при температуре 5–45 °C (оптимально 22–28 °C). После полёта дождитесь остывания батареи до комнатной температуры.
- Не включайте квадрокоптер во время зарядки.
- Заряжайте аккумулятор примерно раз в три месяца при длительном хранении.
Эксплуатация
- Перед установкой или извлечением батареи всегда отключайте питание квадрокоптера.
- Полностью заряжайте батарею перед каждым полётом.
- При низком заряде немедленно завершите полёт.
- При низких температурах (0–5 °C) аккумулятор должен быть полностью заряжен и предварительно прогрет до температуры не ниже 20 °C.
- В холодную погоду выходная мощность снижается, а лётные характеристики ухудшаются — управляйте дроном осторожно.
Хранение и транспортировка
- Храните батарею в сухом месте, вдали от источников тепла и влаги.
- Исключите контакт с металлическими предметами, способными вызвать короткое замыкание.
- Используйте специальные контейнеры из несгораемых материалов.
5.2. Полет по квадрату
Цель Отработать навыки управления квадрокоптером в горизонтальной плоскости, освоить точное выполнение полетных траекторий и плавные маневры.
Ожидаемые результаты
- Уверенное управление квадрокоптером в горизонтальной плоскости.
- Точное удержание заданной траектории полета.
- Развитие плавности управления и контроль скорости движения.
- Освоение выполнения заданных маневров с высокой точностью.
Описание В рамках данного сценария выполняем полет по траектории без изменения высоты. Перед началом упражнения изучаем систему и порядок работы с ней, а также выполняем все необходимые предполетные проверки.
Если уже имеется файл тренировочного полета, переходим к следующему пункту. В ином случае создаем новое полетное задание, следуя инструкциям из раздела «Создание полетного задания».
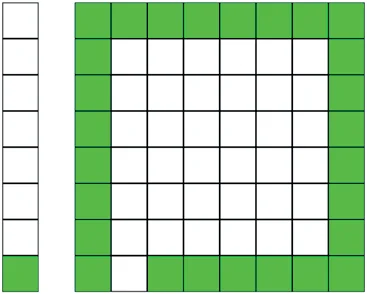
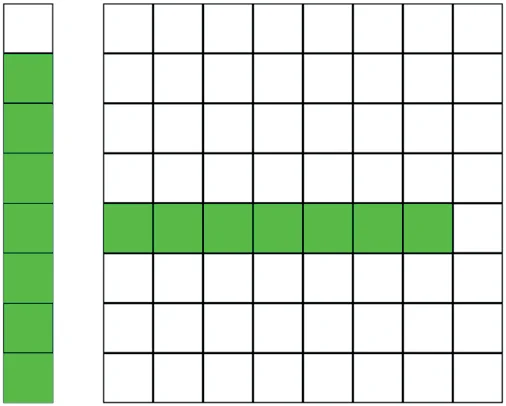
Формирование полетного задания Указываем контрольные точки, образующие квадратную траекторию, сохраняя постоянную координату Z.
Учебный стенд для отработки навыков управления квадрокоптером. Учебное пособие
Например, стартовая точка (X1, Y1, Z1), затем (X1, Y2, Z1), (X1, Y4, Z1) … (X1, Y8, Z1). Далее переходим на следующую грань, добавляя точки (X1, Y8, Z1) … (X8, Y8, Z1). Затем выполняем переход к третьей стороне (X8, Y8, Z1) … (X8, Y1, Z1). Завершаем формирование траектории четвертой стороной квадрата (X8, Y1, Z1) … (X3, Y1, Z1).
Порядок выполнения Перед полетом проверяем реакцию моторов на движения стиков, оцениваем скорость набора ускорения по показаниям датчиков. Начинаем маневрирование плавно, избегая резких движений и контролируя, чтобы ускорение не выходило в красную зону.
При смене направления выполняем повороты аккуратно, контролируем скорость перед остановкой, не отпуская резко стик управления.
После успешного выполнения сценария можно изменить параметры полетного задания, например, уменьшить размер квадрата или изменить направление движения.
Алгоритм выполнения
- Включаем стенд пилотирования и проверяем уровень заряда.
- Активируем герконовые датчики по осям и убеждаемся, что система работает корректно.
- В настройках загружаем файл полетного задания. В режиме Пилотирования выбираем режим «Загрузка».
- Включаем пульт и подключаем питание к дрону.
- На стенде нажимаем «СТАРТ». После обратного отсчета переводим дрон в состояние ARM.
- Проверяем, что дрон находится в стартовой точке по координатам XY.
- Аккуратно поднимаем стик Throttle, пока дрон не стабилизируется.
- Следуем заданной траектории, перемещаясь между контрольными точками.
- Завершаем маневр.
- По окончании работы отключаем питание дрона, пульт и стенд.
5.3. Полет по змейке
Цель Отработать навыки управления квадрокоптером в горизонтальной плоскости, освоить точное выполнение полетных траекторий и плавные маневры.
Ожидаемые результаты
- Уверенное управление квадрокоптером в горизонтальной плоскости.
- Точное удержание заданной траектории полета.
- Развитие плавности управления и контроль скорости движения.
- Освоение выполнения заданных маневров с высокой точностью.
Описание В рамках данного сценария выполняем полет по траектории «змейка» без изменения высоты. Перед началом упражнения изучаем систему и порядок работы с ней, а также выполняем все необходимые предполетные проверки. Если уже имеется файл тренировочного полета, запускаем его. В ином случае создаем новое полетное задание, следуя инструкциям из раздела «Создание полетного задания».
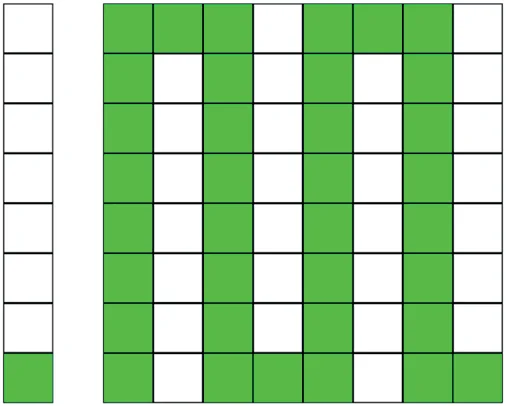
Формирование полетного задания Указываем контрольные точки, образующие траекторию «змейки», сохраняя постоянную координату Z. Дрон должен двигаться плавно между контрольными точками, аккуратно выполняя повороты.
Порядок выполнения Перед полетом проверяем реакцию моторов на движения стиков, оцениваем скорость набора ускорения по показаниям датчиков. Начинаем маневрирование плавно, избегая резких движений и контролируя, чтобы ускорение не выходило в красную зону. При смене направления выполняем повороты аккуратно, контролируем скорость перед остановкой, не отпуская резко стик управления. После успешного выполнения сценария можно изменить параметры полетного задания, например, изменить длину и форму траектории.
Алгоритм выполнения
- Включаем стенд пилотирования и проверяем уровень заряда.
- Активируем герконовые датчики по осям и убеждаемся, что система работает корректно.
- В настройках загружаем файл полетного задания. В режиме Пилотирования выбираем режим Загрузка.
- Включаем пульт и подключаем питание к дрону.
- На стенде нажимаем «СТАРТ». После обратного отсчета переводим дрон в состояние ARM.
- Проверяем, что дрон находится в стартовой точке по координатам XY.
- Аккуратно поднимаем стик Throttle, пока дрон не стабилизируется.
- Следуем заданной траектории, перемещаясь между контрольными точками, удерживая стабильную ориентацию дрона относительно направления движения.
- Завершаем маневр с мягкой посадкой в финальной контрольной точке.
- По окончании работы отключаем питание дрона, пульт и стенд.
5.4. Взлет-посадка
Цель Отработать базовые навыки управления квадрокоптером: взлет, удержание высоты и мягкую посадку.
Ожидаемые результаты
- Уверенное выполнение взлета и посадки.
- Способность вручную удерживать стабильную высоту.
- Развитие плавности и точности управления.
- Освоение мягкой посадки в заданной точке.
Описание Выполняем простые маневры: плавный подъем дрона на заданную высоту, удержание позиции в нескольких точках и последующее мягкое снижение. Перед началом упражнения изучаем систему и порядок работы, проводим обязательные предполетные проверки.
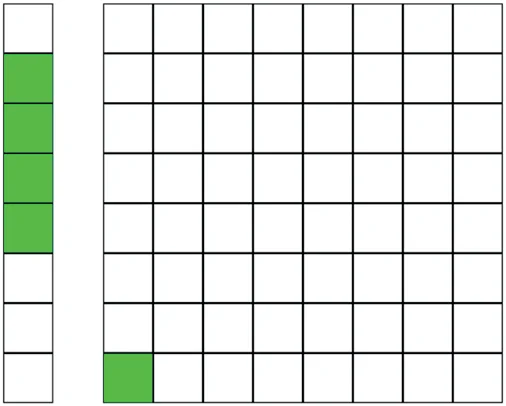
Формирование полетного задания Если тренировочный файл уже создан, переходим к загрузке. В ином случае создаем новое полетное задание, фиксируя координаты X и Y, изменяя только Z для взлета и посадки.
Алгоритм выполнения
- Проверяем соблюдение требований техники безопасности.
- Включаем стенд пилотирования, проверяем уровень заряда.
- Активируем герконовые датчики, убеждаемся в их корректной работе.
- Если файл с полетным заданием уже есть, загружаем его. В ином случае создаем новый, задавая фиксированные X и Y, изменяя Z. Сохраняем файл, используя систему обозначений: первые две цифры обозначают сценарий, последняя — порядковый номер задания.
- Включаем режим Пилотирования, выбираем Режим 1, загружаем соответствующий файл.
- Включаем пульт, подключаем питание к дрону.
- Оцениваем реакцию моторов на движения стиков и скорость набора ускорения по датчикам.
- Осторожно поднимаем стик Throttle, стабилизируем дрон на требуемой высоте.
- Нажимаем «СТАРТ» на стенде, после обратного отсчета переводим дрон в состояние ARM.
- Убеждаемся, что дрон находится в стартовой точке по координатам XY.
- Выполняем взлет плавно, контролируя набор высоты, избегая резких движений.
- Удерживаем дрон в стабильном положении на заданной высоте в течение 10–15 секунд изменяя только высоту по заданным точкам.
- Плавно выполняем посадку, не допуская резких сбросов высоты.
- Повторяем сценарий, при необходимости изменяя высоту для оценки управления на разных уровнях.
- В качестве дополнительного задания выполняем маневры в Режиме 2, отрабатывая стабильное удержание дрона в воздухе с минимальными коррекциями.
- По завершении работы отключаем питание дрона, пульт и стенд.
5.5. Движение по змейке в плоскости Y и Z
Цель Отработать навыки точного вертикального маневрирования квадрокоптера.
Ожидаемые результаты
- Уверенное выполнение плавных вертикальных маневров.
- Способность точно позиционировать и ориентировать дрон при прохождении маршрута.
- Навык поддержания стабильной ориентации аппарата относительно направления движения.
- Мягкое и аккуратное выполнение посадки в финальной контрольной точке.
Описание Выполняем полет, перемещая дрон по маршруту в вертикальной плоскости по «Y» и «Z». Контрольные точки устанавливаются так, чтобы сформировать траекторию «змейки» с чередующимися подъемами и спусками. В процессе выполнения упражнения отрабатываем плавность вертикальных перемещений и точность траектории.
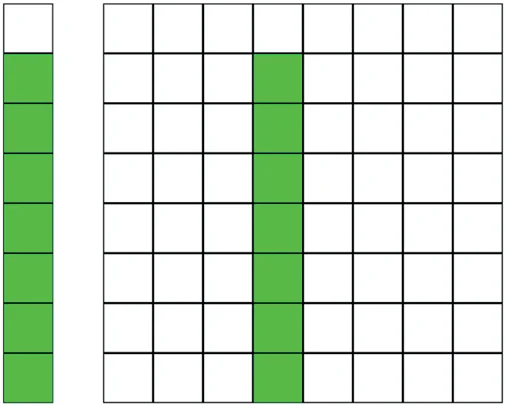
Формирование полетного задания Если тренировочный файл уже создан, переходим к загрузке. В ином случае создаем новое полетное задание, задавая фиксированную координату X и изменяя Y и Z для построения маршрута.
Порядок выполнения
- Проверяем соблюдение требований техники безопасности.
- Если файл с полетным заданием уже есть, загружаем его. В ином случае создаем новый, задавая фиксированный X, изменяя Y и Z.
- Сохраняем файл, используя систему обозначений: первые две цифры обозначают сценарий (03X), последняя — порядковый номер задания.
- Включаем режим Пилотирования, выбираем Режим 1, загружаем соответствующий файл.
- Перед выполнением маневров оцениваем реакцию моторов на движения стиков и скорость набора ускорения по датчикам.
- Выполняем взлет до начальной контрольной точки маршрута, стабилизируем дрон.
- Плавно перемещаем дрон по заданной траектории «змейки», выполняя подъемы и спуски без резких движений.
- Поддерживаем стабильную ориентацию аппарата относительно направления движения.
- Выполняем мягкую посадку в финальной контрольной точке.
- Повторяем сценарий, изменяя параметры высоты и положения контрольных точек для оценки управления в различных условиях.
- В качестве дополнительного задания выполняем маневры в Режиме 2, отрабатывая точное удержание дрона в воздухе при минимальных коррекциях.
Алгоритм выполнения
- Включаем стенд пилотирования, проверяем уровень заряда.
- Активируем герконовые датчики, убеждаемся в их корректной работе.
- В настройках загружаем файл полетного задания, в режиме Пилотирования выбираем режим Загрузка.
- Включаем пульт, подключаем питание к дрону.
- Нажимаем «СТАРТ» на стенде, после обратного отсчета переводим дрон в состояние ARM.
- Убеждаемся, что дрон находится в стартовой точке по координатам XY.
- Используя стики Pitch и Throttle, осторожно перемещаем дрон по маршруту «змейки», следя за показателями по осям.
- Контролируем плавность вертикальных перемещений, избегая резких маневров.
- Выполняем мягкую посадку в финальной точке.
- По завершении работы отключаем питание дрона, пульт и стенд.
Сценарий развивает пространственное мышление и координацию движений, формируя базовые навыки вертикального маневрирования, необходимые для выполнения сложных полетных заданий.
5.6. Практика 4. Движение по змейке в плоскости X и Z
Цель Отработать навыки точного горизонтального маневрирования квадрокоптера.
Ожидаемые результаты
- Уверенное выполнение плавных маневров в горизонтальной плоскости.
- Способность точно позиционировать и ориентировать дрон при прохождении маршрута.
- Навык поддержания стабильной ориентации аппарата относительно направления движения.
- Мягкая и точная посадка в финальной контрольной точке.
Описание Выполняем серию полетов, перемещая дрон по маршруту «змейкой» в плоскости XZ. Контрольные точки формируют траекторию с чередующимися смещениями по X и Z. В процессе полета отрабатываем точность перемещений, ориентацию аппарата и плавность движений.
Формирование полетного задания Если файл с полетным заданием уже создан, переходим к загрузке. В ином случае создаем новое, задавая фиксированную координату Y и изменяя X и Z для построения маршрута.
Порядок выполнения
- Проверяем соблюдение требований техники безопасности.
- Если файл с полетным заданием уже есть, загружаем его . В ином случае создаем новый, задавая фиксированную координату Y и изменяя X и Z.
- Сохраняем файл, используя систему обозначений: первые две цифры обозначают сценарий (04X), последняя — порядковый номер задания.
- Включаем режим Пилотирования, выбираем Режим 1, загружаем соответствующий файл.
- Перед выполнением маневров оцениваем реакцию моторов на движения стиков и скорость набора ускорения по датчикам.
- Выполняем взлет до начальной точки маршрута, стабилизируем дрон.
- Плавно перемещаем дрон по маршруту «змейки», избегая резких движений.
- Поддерживаем стабильную ориентацию аппарата относительно направления движения.
- Выполняем мягкую посадку в финальной контрольной точке.
- Повторяем сценарий, изменяя параметры маршрута для тренировки управления в разных условиях.
- В качестве дополнительного задания выполняем маневры в Режиме 2, отрабатывая точное удержание дрона в воздухе при минимальных коррекциях.
Алгоритм выполнения
- Включаем стенд пилотирования, проверяем уровень заряда.
- Активируем герконовые датчики, убеждаемся в их корректной работе.
- В настройках загружаем файл полетного задания, в режиме Пилотирования выбираем режим Загрузка.
- Включаем пульт, подключаем питание к дрону.
- Нажимаем «СТАРТ» на стенде, после обратного отсчета переводим дрон в состояние ARM.
- Убеждаемся, что дрон находится в стартовой точке по координатам Y.
- Используя стики Roll и Throttle, осторожно перемещаем дрон по маршруту «змейки», следя за показателями по осям.
- Контролируем плавность перемещений, избегая резких маневров.
- Выполняем мягкую посадку в финальной точке.
- По завершении работы отключаем питание дрона, пульт и стенд.
Сценарий развивает пространственное мышление и координацию движений, формируя ключевые навыки горизонтального маневрирования, необходимые для выполнения сложных полетных задач.
5.7. Движение по диагоналям
Цель Отработать навыки пространственного маневрирования и координации движений квадрокоптера.
Ожидаемые результаты
- Уверенное выполнение точных диагональных маневров в трехмерном пространстве.
- Способность плавно и синхронно перемещать дрон при прохождении маршрута с диагональными участками.
- Навык поддержания стабильной ориентации аппарата при сложных пространственных траекториях.
- Плавная и аккуратная посадка в финальной контрольной точке.
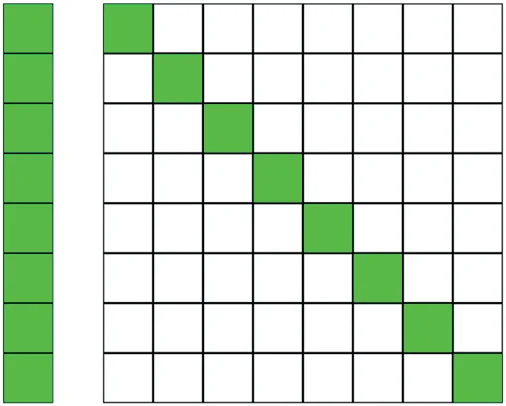
Описание Оператор выполняет серию полетов, перемещая дрон по маршруту с диагональными участками в трехмерном пространстве. Контрольные точки заданы таким образом, чтобы траектория включала изменения координат сразу по нескольким осям (X, Y, Z). В процессе полета оператор отрабатывает точность движений, ориентацию дрона и плавность маневров.
Формирование полетного задания Если файл с полетным заданием уже создан, загружаем его. В ином случае создаем новое, задавая последовательность точек с изменяющимися координатами. Для создания полетного задания на пролет по диагонали лучше начать с одной высоты для пролета полетного задания. После успешного выполнения, создаем полетное задание, где пролет по диагонали в каждой точке будет изменена высота (Z)
Порядок выполнения
- Проверяем соблюдение требований техники безопасности.
- Если файл с полетным заданием уже есть, загружаем его. В ином случае создаем новый, задавая координаты X, Y, Z. Рекомендуется начать облет полетного задания по диагонали с одного значения по Z, после успешного пролета полетного задания для отработки и закрепления полученных навыков рекомендуется изменять значение Z в каждой из точек на +1 или -1.
- Сохраняем файл, используя систему обозначений: первые две цифры обозначают сценарий (05X), последняя — порядковый номер задания.
- Включаем режим Пилотирования, выбираем Режим 1, загружаем соответствующий файл.
- Перед выполнением маневров оцениваем реакцию моторов на движения стиков и скорость набора ускорения по датчикам.
- Выполняем взлет до начальной контрольной точки, стабилизируем дрон.
- Плавно перемещаем дрон по маршруту, удерживая стабильную ориентацию.
- Контролируем синхронность движения по диагонали, избегаем резких маневров.
- Выполняем мягкую посадку в финальной контрольной точке.
- Повторяем сценарий, изменяя параметры маршрута для тренировки управления в разных условиях.
- В качестве дополнительного задания изменяем высоты точек на диагонали или меняем направление полета.
Алгоритм выполнения
- Включаем стенд пилотирования, проверяем уровень заряда.
- Активируем герконовые датчики, убеждаемся в их корректной работе.
- В настройках загружаем файл полетного задания, в режиме Пилотирования выбираем режим Загрузка.
- Включаем пульт, подключаем питание к дрону.
- Нажимаем «СТАРТ» на стенде, после обратного отсчета переводим дрон в состояние ARM.
- Убеждаемся, что дрон находится в стартовой точке маршрута.
- Используя стики Pitch, Roll, Throttle, осторожно перемещаем дрон по диагональному маршруту, следя за показателями по осям и точкам.
- Контролируем плавность перемещений, избегая резких движений.
- Выполняем мягкую посадку в финальной точке.
- По завершении работы отключаем питание дрона, пульт и стенд.
Сценарий развивает пространственное мышление и координацию движений оператора, позволяя отработать точное управление дроном в трехмерном пространстве.
5.8. Пролет по всем граням куба
Цель Отработать навыки точного пространственного маневрирования и ориентации дрона в ограниченном объеме.
Задачи - Развивать пространственное мышление и координацию движений оператора.
- Оттачивать навыки точного управления дроном в трехмерном пространстве.
- Закреплять умения выполнять сложные маневры в ограниченном пространстве.
Ожидаемые результаты
- Высокий уровень владения системой управления для выполнения точных пространственных маневров.
- Способность плавно и синхронно позиционировать дрон при последовательном облете граней куба.
- Навыки точного удержания ориентации аппарата относительно заданных ориентиров.
- Аккуратность и плавность финальной посадки дрона.
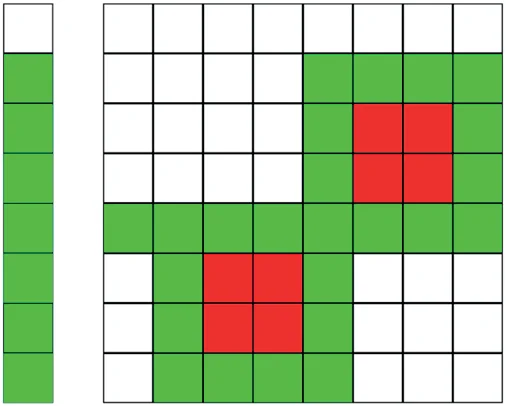
Описание Оператор выполняет серию полетов, в ходе которых дрон должен последовательно пролететь вдоль всех граней куба, ограничивающего рабочую зону. Данный сценарий моделирует задачи, характерные для инспекции и облета ограниченных пространств, таких как технологические резервуары или труднодоступные производственные объекты. Отработка подобных маневров развивает навыки пилотирования, необходимые для выполнения реальных задач в стесненных условиях.
- Взлет дрона и его позиционирование в стартовом углу куба.
- Последовательное перемещение дрона вдоль каждой грани куба с сохранением заданной ориентации.
- Плавное изменение высоты, положения и ориентации аппарата при переходе от одной грани к другой.
- Точная остановка и зависание дрона в стартовом углу куба после завершения облета всех граней.
- Аккуратная посадка дрона в финальной точке.
Формирование полетного задания Если файл с полетным заданием уже создан, загрузите его. В ином случае создайте новое, задавая последовательность точек с изменяющимися координатами по осям X, Y и Z. Пролет осуществляется по всем граням куба и диагоналям, переходы создаем по диагоналям куба. Для удобства идентификации файлов используйте систему обозначений: первые две цифры в названии файла обозначают сценарий (01X), а последняя — порядковый номер задания.
Алгоритм выполнения полетного задания
- Проверяем соблюдение требований техники безопасности.
- Включаем стенд пилотирования, проверяем уровень заряда.
- Активируем герконовые датчики, убеждаемся в их корректной работе.
- Если файл с полетным заданием уже есть, загружаем его. В ином случае создаем новый, задавая фиксированные X и Y, изменяя Z. Сохраняем файл с учетом системы обозначений.
- Включаем режим Пилотирования, выбираем «Режим 1», загружаем соответствующий файл.
- Включаем пульт, подключаем питание к дрону.
- Оцениваем реакцию моторов на движения стиков и скорость набора ускорения по датчикам.
- Осторожно поднимаем стик «Throttle», стабилизируем дрон на требуемой высоте.
- Нажимаем «СТАРТ» на стенде, после обратного отсчета переводим дрон в состояние «ARM».
- Убеждаемся, что дрон находится в стартовой точке по координатам X и Y.
- Плавно перемещаем дрон вдоль граней куба, контролируя его ориентацию и избегая резких движений.
- При переходе от одной грани к другой плавно изменяем высоту, положение и ориентацию дрона.
- После облета граней в одной плоскости выполняем переход через диагонали, совмещая несколько полетных заданий в одном.
- После завершения облета всех граней и диагоналей точно останавливаем дрон в стартовом углу куба и выполняем мягкую посадку.
- Повторяем сценарий, изменяя параметры полетного задания (например, высоту или координаты точек) для отработки навыков в различных условиях.
- В качестве дополнительного задания выполняем сценарий в Режиме 2, который требует более высокого уровня контроля и чувствительности в управлении.
Дополнительные рекомендации
- Особое внимание уделяем плавности спуска и посадки, избегая резких движений стиками.
- Постепенно усложняем задачу, изменяя параметры полетного задания (например, высоту или скорость перемещения).
- Регулярно повторяем сценарий для закрепления навыков и повышения уверенности в управлении дроном.
5.9 . Полёт по траектории «восьмёрка» с препятствиями
Цель Отработать навыки точного управления дроном при выполнении сложных траекторий в условиях наличия препятствий. Развить способность оператора к пространственному маневрированию и оперативному принятию решений.
Задачи
- Развитие пространственного мышления и координацию движений.
- Оттачивание полученных ранее навыков точного управления дроном в условиях наличия препятствий.
- Развитие умения оперативно реагировать на изменения окружающей обстановки.
- Закрепление способности выполнять сложные маневры с сохранением стабильной ориентации аппарата.
Ожидаемые результаты
- Уверенное выполнение полета по траектории «восьмёрка» с обходом препятствий.
- Способность плавно и синхронно перемещать дрон, сохраняя стабильную ориентацию.
- Навыки оперативного реагирования на изменения окружающей обстановки.
- Плавная и аккуратная посадка в финальной контрольной точке.
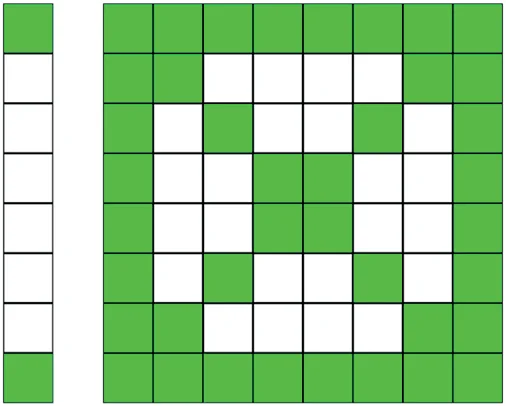
Описание Выполняем полет по траектории «восьмёрка», включающей две петли, пересекающиеся в центральной точке. На маршруте добавляем контрольные точки с препятствиями, которые необходимо облететь, сохраняя заданную траекторию. Данный сценарий моделирует реальные задачи, такие как облет объектов в сложных условиях или инспекция территорий с препятствиями.
- Создаем начальную позицию дрона и выполняем взлет.
- Плавно перемещаем дрон по траектории «восьмёрка», обходя препятствия.
- Контролируем ориентацию дрона и его положение относительно препятствий.
- Точно завершаем траекторию и выполняем мягкую посадку в финальной точке.
Формирование полетного задания Если файл с полетным заданием уже создан, загружаем его. В противном случае создаем новое, задавая последовательность точек с изменяющимися координатами по осям X, Y и Z. Учитываем расположение препятствий, добавляя точки для их обхода. Для идентификации файлов используем систему обозначений: первые две цифры в названии файла обозначают сценарий (07X), а последняя — порядковый номер задания.
Алгоритм выполнения
Проверяем соблюдение требований техники безопасности.
Включаем стенд пилотирования, проверяем уровень заряда.
Активируем герконовые датчики, убеждаемся в их корректной работе.
Если файл с полетным заданием уже есть, загружаем его. В ином случае создаем новый, задавая фиксированные X и Y, изменяя Z. Сохраняем файл, используя систему обозначений: первые две цифры обозначают сценарий, последняя — порядковый номер задания.
Включаем режим Пилотирования, выбираем «Режим 1», загружаем соответствующий файл.
Включаем пульт, подключаем питание к дрону.
Оцениваем реакцию моторов на движения стиков и скорость набора ускорения по датчикам.
Осторожно поднимаем стик «Throttle», стабилизируем дрон на требуемой высоте.
Нажимаем «СТАРТ» на стенде, после обратного отсчета переводим дрон в состояние «ARM».
Убеждаемся, что дрон находится в стартовой точке по координатам «X» и «Y».
Выполняем взлет и стабилизируем дрон в стартовой точке.
Плавно перемещаем дрон по траектории «восьмёрка», контролируя его ориентацию и обходя препятствия.
При приближении к препятствиям плавно изменяем высоту или положение дрона, чтобы избежать столкновения.
После завершения траектории точно останавливаем дрон в финальной точке и выполняем мягкую посадку.
Повторяем сценарий, изменяя параметры полетного задания (например, высоту или расположение препятствий) для отработки навыков в различных условиях.
В качестве дополнительного задания выполняем сценарий в Режиме 2, который требует более высокого уровня контроля и чувствительности в управлении.
Дополнительные рекомендации
- Особое внимание уделите плавности движений при обходе препятствий, избегая резких маневров.
- Постепенно усложняйте задачу, добавляя новые препятствия или изменяя их расположение.
- Регулярно повторяйте сценарий для закрепления навыков и повышения уверенности в управлении дроном.