Глава 4. Основные понятия и принципы работы квадрокоптера
4.1. Термины и определения
| Сокращение | Полное наименование |
|---|---|
| АКБ / аккумулятор / батарея | Перезаряжаемый источник тока для БПЛА. В квадрокоптерах обычно применяются Li-po (литий-полимерные) аккумуляторы. |
| Приемопередатчик | Электронное устройство, совмещающее в себе функции передатчика и приемника сигнала. Используется для двусторонней передачи данных. |
| Аппаратура / пульт | Пульт для управления квадрокоптером, работающий по радиоканалу. Для работы пульта к полетном контроллеру необходимо подключить (радио приемник). |
| БПЛА | Беспилотный летательный аппарат. |
| Взлетный вес | Общий вес квадрокоптера, включая аккумулятор, приемник, раму, кабели, моторы и другое. |
| Воздушный винт / пропеллер | Лопастной движитель, создающий при вращении тягу за счёт отбрасывания воздуха назад с некоторой дополнительной скоростью, приводимый во вращение двигателем и преобразующий крутящий момент двигателя в силу тяги. |
| Квадрокоптер | Беспилотный летательный аппарат с 4-мя винтами и электронной системой стабилизации. |
| Мультикоптер | Беспилотный летательный аппарат с электронной системой стабилизации и числом винтов, равным 3 (трикоптер), 4 (квадрокоптер), 6 (гексакоптер), 8 (октокоптер) или более. |
| Roll (Крен) | Крен относится к вращению беспилотника вокруг его продольной оси. Это движение позволяет дрону наклоняться из стороны в сторону. |
| Pitch (Тангаж) | Тангаж относится к вращению беспилотника вокруг его поперечной оси. Это движение позволяет дрону наклоняться вперед или назад. |
| Yaw (Рыскание) | Рыскание относится к вращению беспилотника вокруг его вертикальной оси. Это движение позволяет дрону поворачиваться влево или вправо. |
| Throttle (Газ) | Газ это управление скоростью вращения винтов дрона. Повышение газа увеличивает подъемную силу, а понижение уменьшает её. |
| ПО | Программное обеспечение |
| Прошивка | Программное обеспечение, управляющее работой какого-либо устройства |
| Приемник (Receiver) | Устройство в квадрокоптере, принимающее сигнал с пульта управления. Передает данные в полетный контроллер для управления дроном. |
| Рама | Основа для квадрокоптера, состоит из четырех лучей (шести, если это гексакоптер и восьми, если это октокоптер) и крестовины. Обычно в качестве основного материала при ее изготовлении используются карбон и пластик. |
| Мотор / Электродвигатель / Привод | Электродвигатель, который вращает винты мультикоптера. Обычно используются бесколлекторные или коллекторные электродвигатели. |
| Ячейка АКБ | Составная часть АКБ, непосредственный источник тока. Обычно АКБ для БПЛА состоят из нескольких (2–6) ячеек, соединенных последовательно. Максимальное напряжение одной Li-po ячейки – 4.2 В; общее напряжение АКБ равно суммарному напряжению ячеек. Количество ячеек обозначается буквой S, например: 2S, 3S, 4S. |
| ARM | Режим Arm (постановка на охрану) не позволит контроллеру полета включить управление при определенных условиях, таких как поднятие стика Throttle или включение навигационного режима(NavMode). |
4.2. Основы управления
Квадрокоптер — это разновидность мультикоптера, летательного аппарата с несколькими несущими винтами, управляемого изменением их тяги. В отличие от самолетов и вертолетов, квадрокоптер передвигается исключительно за счет работы пропеллеров, без использования крыльев или рулевых поверхностей. Такая конструкция делает его маневренным, компактным и удобным в управлении. Благодаря этим качествам квадрокоптеры применяются в самых разных сферах: от аэрофотосъемки и мониторинга объектов до логистики и промышленного контроля.
4.2.1. Оси управления
Классический квадрокоптер имеет крестообразную раму, на концах которой установлены четыре двигателя с пропеллерами (Рис. 4.2.1). Такая конструкция обеспечивает равномерное распределение массы и устойчивость в полете. Пропеллеры вращаются с высокой скоростью, создавая подъемную силу, которая поднимает дрон в воздух. В конструкции должно быть два мотора правого вращения и два – левого. Направление вращения моторов диагонально должно совпадать. Управление квадрокоптером осуществляется изменением скорости вращения отдельных моторов. Если увеличить или уменьшить обороты на разных осях, дрон наклоняется, поворачивается или двигается в заданном направлении.
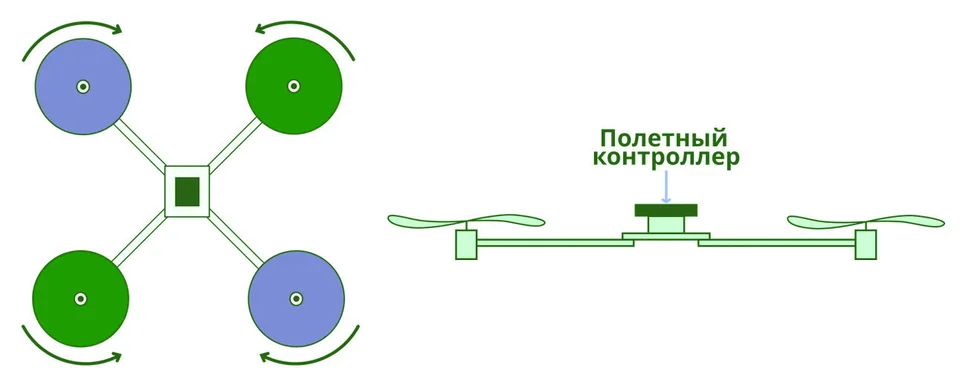
Устройство квадрокоптера
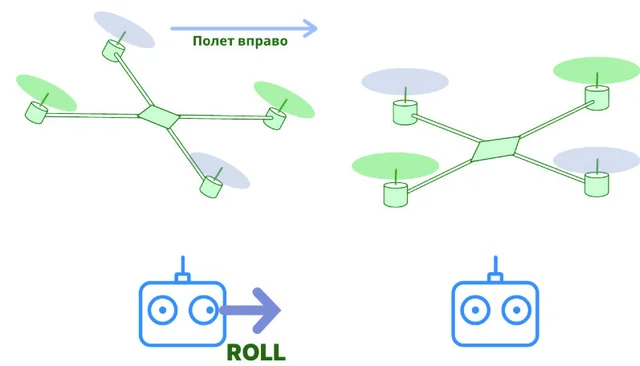
В управлении дроном используются стандартные авиационные термины для обозначения осей вращения. Крен (Roll) – вращение дрона вокруг своей продольной оси. Наклон дрона по оси Roll приводит к движению вправо или влево. Тангаж (Pitch) – вращение дрона вокруг своей поперечной оси. Наклон дрона по оси Pitch приводит к движению вперед или назад. Рыскание (Yaw) – это вращение квадрокоптера вокруг своей вертикальной оси, которое ведет к повороту носа дрона налево или направо. Помимо управления по осям существует управление по газу (Throttle). Увеличивая или уменьшая его, дрон будет набирать высоту или снижаться. А в случае гоночных дронов в определенном режиме полета – двигаться в заданном направлении на больших скоростях. За отправку команд управления отвечает передатчик (пульт). Управление дроном по осям происходит за счет отклонения того или иного стика на пульте (Рис. 4.2.2). За изменение по Roll (крен/наклон вправо-влево), отвечает правый стик, двигаясь вправо-влево.
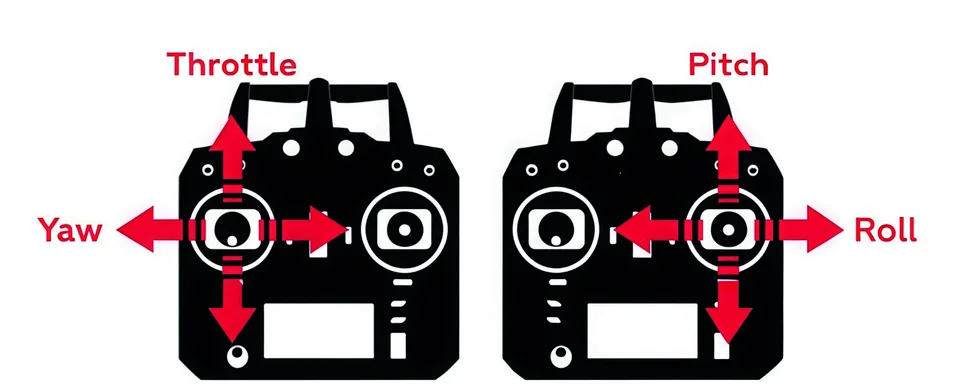
Стики и их движение, отвечающие за изменение положения квадрокоптера по осям
За изменение по Pitch (тангаж/наклон вперед-назад), отвечает правый стик, двигаясь вперед-назад.
За изменение по Yaw (рыскание/разворот вправо-влево), отвечает левый стик, двигаясь вправо-влево.
За изменение по Throttle (газ/высота/ускорение), отвечает левый стик, двигаясь вперед-назад.
4.2.2. Принципы движения. Силы, действующие на дрон в полете
Рассмотрим процесс того, как именно создается движение. Пропеллеры играют главную роль в создании необходимой подъемной силы. Когда пропеллеры вращаются, воздух над лопастью движется быстрее, чем под ней. Согласно закону Бернулли, там, где скорость потока выше, давление ниже. Соответственно, высокое давление под лопастью толкает весь пропеллер, следовательно, и весь дрон (или его часть) вверх. Воздушные винты, расположенные на диагональных лучах рамы, создают суммарную вертикальную тягу. Синхронно регулируя обороты моторов, можно заставить квадрокоптер подниматься вверх, зависать или опускаться. Если изменить обороты моторов неравномерно, то квадрокоптер отклонится от горизонтального положения и полетит в сторону наклона. Например, при увеличении оборотов двух задних моторов его задняя часть приподнимется, и квадрокоптер полетит вперед; при увеличении оборотов двух левых моторов, квадрокоптер полетит вправо. Изучим рисунок 4.2.3. На изображении зеленым отмечены винты, вращающиеся в одном направлении. Белым отмечены винты, вращающиеся в противоположную сторону. Стрелки указывают на увеличение или уменьшение оборотов моторов.
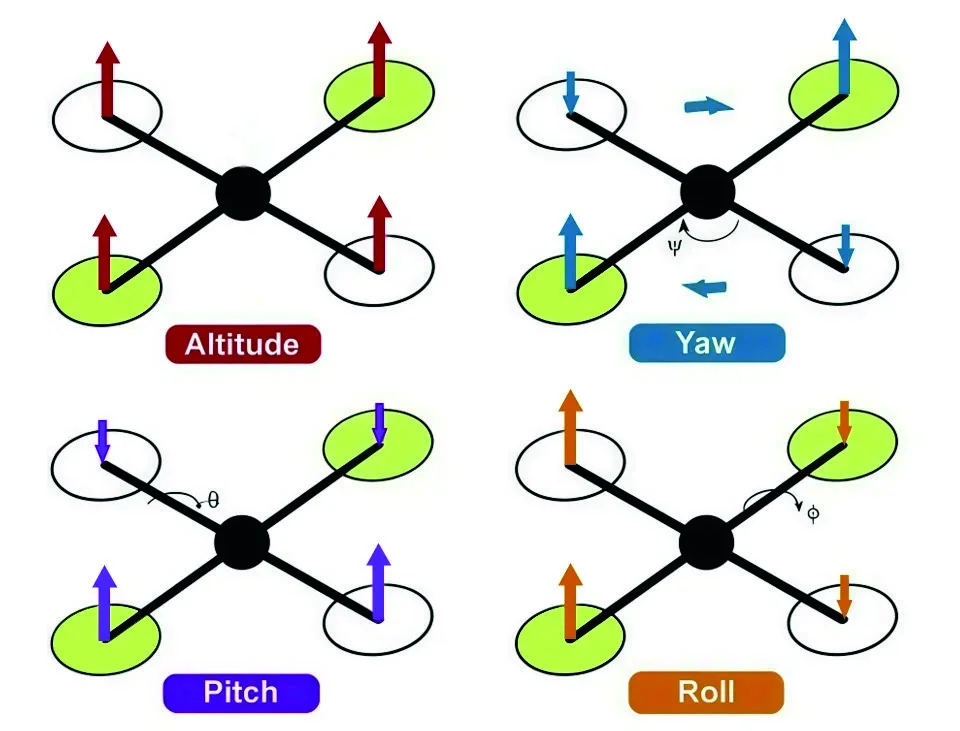
Изменение положения квадрокоптера по осям при изменении скорости вращения моторов
Изменение положения мультикоптера в пространстве происходит благодаря тому, что тяга моторов на одной стороне дрона становится больше, чем на другой. Рассмотрим подробнее взаимодействие сил, действующих на дрон в полете и влияющих на его положение.
Изменение высоты При зависании дрон должен находиться в строго горизонтальном положении, Суммарная Тяга (Т∑), перпендикулярная плоскости вращения всех пропеллеров, и Сила тяжести (Fg) должны быть равны (Рис. 4.2.4). Этот баланс сил позволяет дрону оставаться неподвижным в воздухе на заданной высоте.
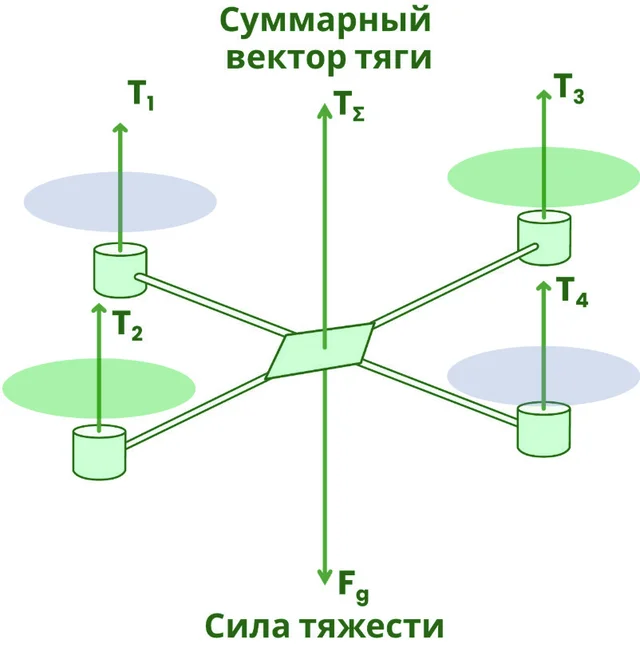
Направление векторов тяги и силы тяжести при зависании
При зависании угол наклона дрона по осям pitch и roll должен быть равен нулю. Уравнение зависания выглядит следующим образом:
T m _ g = 0 или T = m _ g
где T суммарная тяга моторов, m * g вес дрона. Для подъема вверх необходимо увеличить тягу посредством равномерного увеличения скорости вращения всех моторов, поднимая стик пу Throttle вверх. Тогда тяга будет больше силы тяжести и это позволит дрону подниматься вертикально вверх. Уравнение увеличения высоты квадрокоптера: _T > m _ g*
При вертикальном спуске обороты моторов снижаются, Суммарная тяга становится меньше Силы тяжести, и дрон опускается вниз. Скорость снижения высоты зависит от величины разница Суммарной тяги и Силы тяжести. Уравнение снижения:
_T < m _ g*
Движение в стороны Тяга моторов увеличивается и уменьшается с увеличением или уменьшением скорости вращения моторов, соответственно. При уменьшении оборотов моторов на одной стороне беспилотника тяга на ней будет меньше, чем на другой. Это приведет к наклону дрона на определенный угол в ту сторону, где тяга меньше. С наклоном появляется Горизонтальная и вертикальная составляющие тяги. Горизонтальная сила направленна в сторону наклона, вертикальная – перпендикулярна ей. Суммарный вектор тяги является результирующим двух векторов (Рис. 4.2.5).
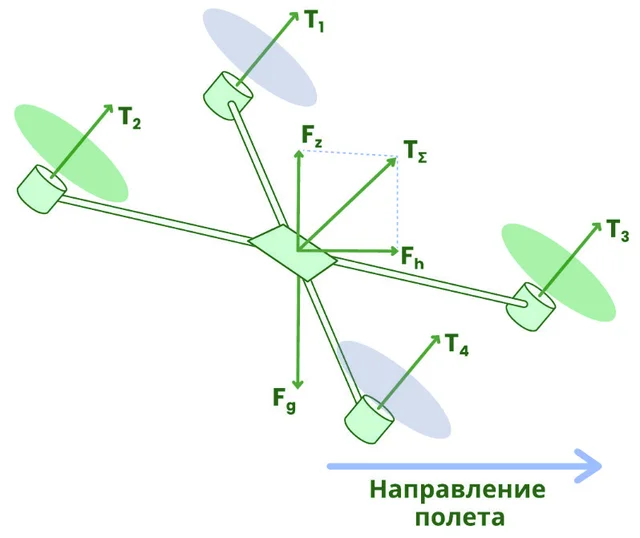
Направление суммарного вектора тяги
Как было сказано ранее, если наклон дрона будет слишком большим, горизонтальная сила увеличится и дрон начнет терять высоту. Этот эффект называется соскальзывание. Чтобы этого не произошло, оператор должен поднять стик газа (Throttle). Это позволит увеличить скорость полета и не потерять высоту.
Повороты дрона Кроме рассмотренных сил, где квадрокоптер является точкой приложения, обратим внимание на механическое взаимодействие элементов его конструкции, которое также влияет на движение. Вращающиеся винты создают Реактивный крутящий момент, который старается развернуть раму квадрокоптера в сторону, противоположную вращению винта. Поэтому в квадрокоптере два винта вращаются по часовой стрелке и два против часовой стрелки, взаимно уравновешивая Реактивные моменты (M). Если увеличить обороты моторов, вращающихся по часовой стрелке, и в равной мере уменьшить обороты у вращающихся против часовой стрелки, то суммарная вертикальная тяга не изменится, однако баланс реактивных моментов будет нарушен, и рама начнет поворачиваться против часовой стрелки (Рис. 4.2.6). Аналогично можно заставить квадрокоптер поворачиваться по часовой стрелке.
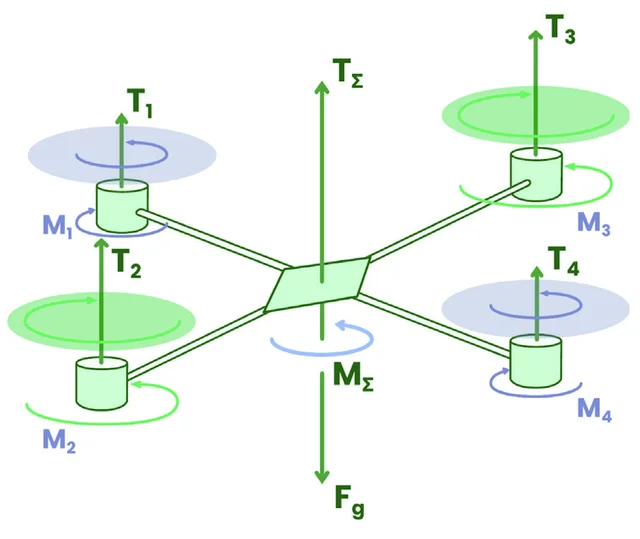
Поворот квадрокоптера против часовой стрелки
На квадрокоптер в полете действуют и другие силы, однако для понимания базовых принципов движения беспилотника ключевыми остаются силы, рассмотренные выше.
4.2.3. Режимы полета
Режимы полета БПЛА — это предустановленные алгоритмы работы полетного контроллера, которые определяют, реакцию дрона на команды пилота с пульта управления и данные с датчиков. Стандартные режимы полета не управляют дроном за пилота. Обычно они используются для оказания помощи в пилотировании. Для данного квадрокоптера используется режим полета ANGLE (STABILIZE). В этом режиме управление основано на задании угла наклона. При нейтральном положении стиков пульта дрон автоматически выравнивается и сохраняет горизонтальное положение. Наклон стиков напрямую определяет угол крена или тангажа, величина которого ограничена настройками полетного контроллера. Важно отметить, что автоматическое поддержание высоты отсутствует, поэтому пилот должен вручную управлять газом. Режим подходит для освоения первичных навыков управления.
4.2.4. Особенности управления
При управлении в режиме полета Angle квадрокоптер наклоняется в ту или иную сторону. Когда стики Roll или Pitch находятся в своем крайнем положении, дрон будет удерживать максимально допустимый угол наклона, не допуская переворот. Максимальный угол наклона настраивается в ПО полетного контроллера. Когда пилот убирает руки с джойстиков, полетный контроллер возвращает дрон в горизонтальное положение.
Реакция дрона на возвращение стика пульта в нейтральное положение в режиме ANGLE (Stabilize)
В данном режиме нет автоматического удержания высоты. При полете в сторону (вправо/влево/вперед/назад) происходит эффект «соскальзывания». Это значит, что дрон в любом случае будет терять высоту при движении в сторону. Поэтому при управлении для сохранения высоты необходимо двигать стик газа (Throttle), контролирующий высоту, с малой амплитудой то вверх, то вниз.
Влияние инерции на управление Все тела имеют инерцию. Инерция – это сохранение дроном скорости и направления прежнего движения, даже при отсутствии команд с пульта управления. Пример: смещение стика Roll вправо приведет к наклону и движению дрона вправо. При возврате стика в центральное положение квадрокоптер также выравнивается, что должно останавливать движение, так как никаких сигналов и команд нет, но из-за инерции дрон пролетит еще какое-то расстояние. В режиме Angle, чтобы остановить нежелательное движение, необходимо на короткое время немного отклонить стик Pitch назад (на себя), затем вернуть его в центральное положение. Инерция будет скомпенсирована, и дрон не пролетит ненужное расстояние.
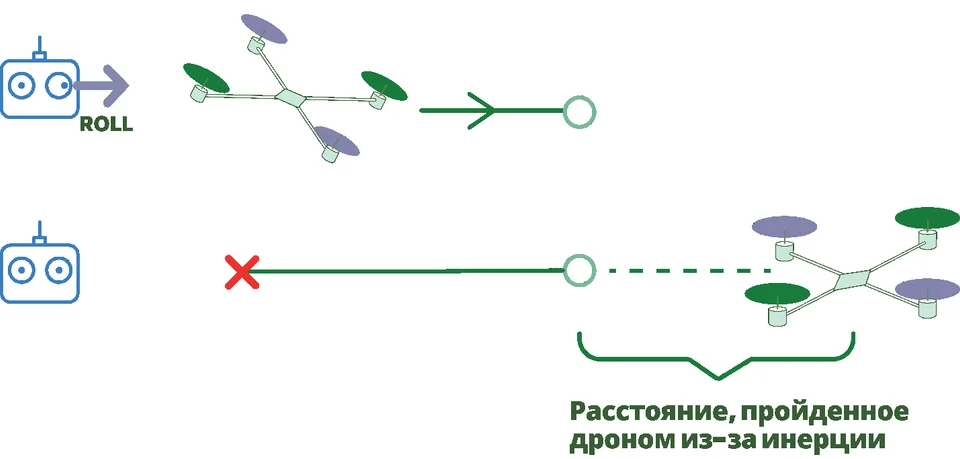
Действие инерции при управлении в режиме Angle
В режиме Angle, чтобы остановить нежелательное движение, необходимо на короткое время немного отклонить стик Pitch назад (на себя), затем вернуть его в центральное положение. Инерция будет скомпенсирована, и дрон не пролетит ненужное расстояние.
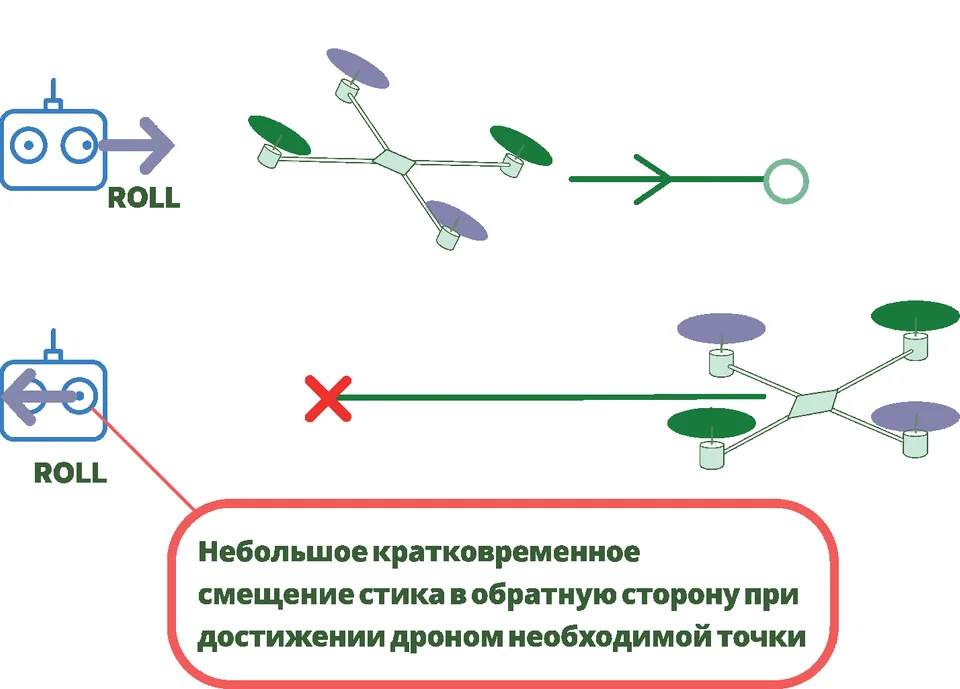
Компенсация инерции в режиме Angle