Глава 3. Настройки стенда
3.1. Настройки
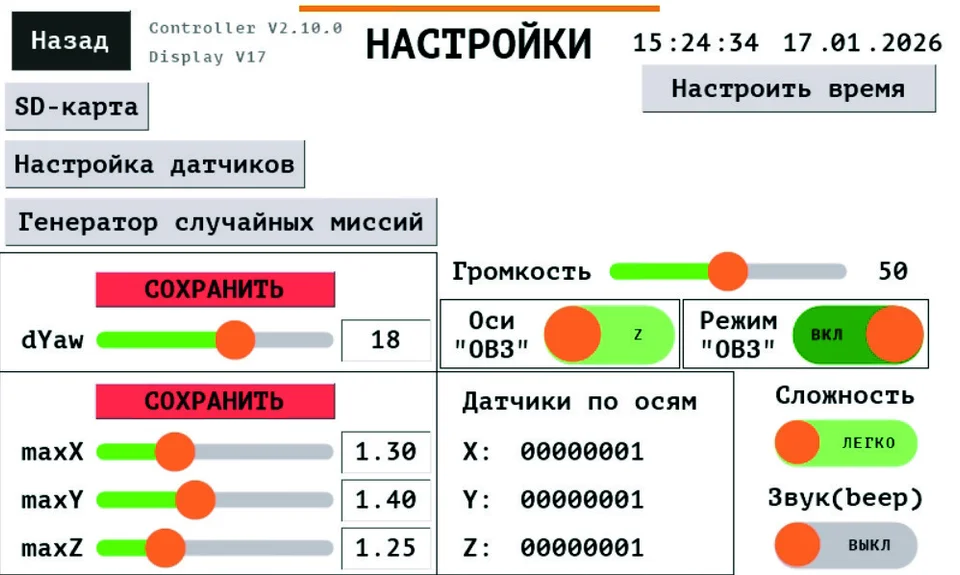
Настройки
Вкладка «Настройки» , включаем следующие элементы:
- Установка даты и времени «Настроить время».
Для корректной работы и считывания данных о полетах необходимо задать актуальные дату и время:
Вводим текущие значения в соответствующие поля. Нажмем кнопку «Записать». Установленные данные отобразятся в верхнем правом углу интерфейса и сохранятся при выключении системы.
- Проверка линейных приемопередатчиков «Датчики по осям». Перед началом тренировки рекомендуется проверить работоспособность датчиков:
Убедимся, что квадрокоптер выключен. Вручную перемещаем дрон по осям X, Y, Z. Обращаем внимание на поле «Датчики по осям», где отображаются текущие координаты и служебные данные от микроконтроллера.
Звуковое сопровождение «Звук (beep)». Переключатель «Звук» активирует/деактивирует звуковые сигналы при изменении положения дрона, фиксируемом приемопередатчиками. Рекомендуется для начинающих пилотов.
Режим сложности «Сложность». Изменяет чувствительность отслеживания попадания в заданную позицию при пилотировании. «Легко»: снижена чувствительность отслеживания позиции (допустимы небольшие отклонения от цели на 1 клетку). «Сложно»: повышенная точность требований к позиционированию (для опытных пилотов, четкое попадание в клетку).
Режим «ОВЗ» (для слабовидящих). Включение режима: переключатель активирует голосовое сопровождение положения дрона. Переключатель «Оси ОВЗ» позволяет выбрать озвучку только по вертикали (Z) или по всем осям (XYZ). Параметр dYaw в режиме «ОВЗ» устанавливается диапазон разрешенного отклонения от курса (Yaw):
Установите допустимое отклонение от курса (0–30°) с помощью ползунка. При значении 0 контроль отклонения отключается. При превышении порога подается предупреждающий сигнал. Для сохранения настроек нажимаем кнопку «Сохранить» (п. 8).
- Максимальные линейные ускорения (maxX maxY MaxZ). Ограничьте ускорения по осям для предотвращения резких движений:
Используйте ползунки «maxX», «maxY», «maxZ» для задания предельных значений. При превышении ускорений начисляются штрафные баллы. Сохраните изменения кнопкой «Сохранить» (п. 10).
«Настройка датчиков». В вкладке выводится информация о подключенных приемопередатчиках: состояние, подключение и ID.
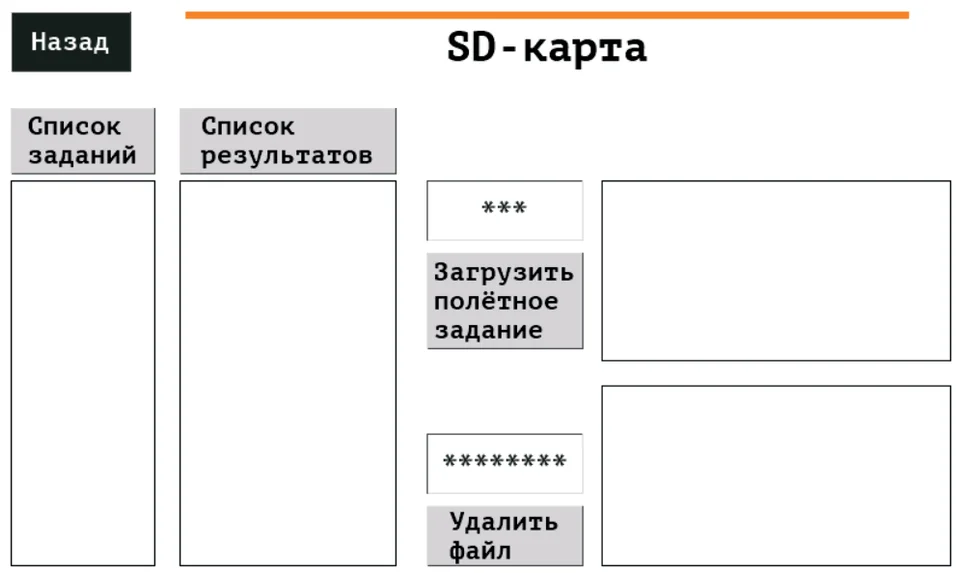
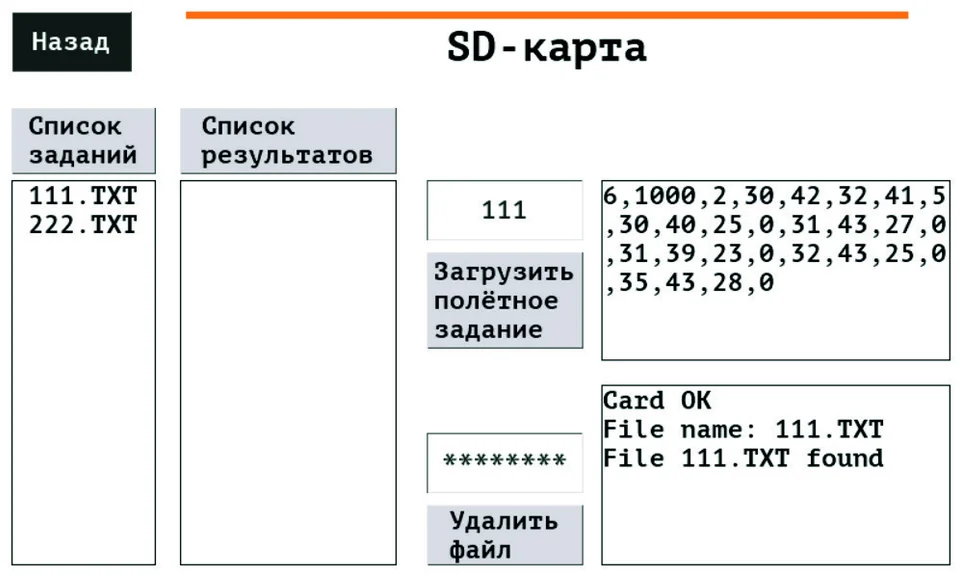
Работа с SD-картой (Рис. 3.1.2) На SD-карте хранятся файлы полётных заданий в формате трёхзначных чисел (000–999).
Нажмите «SD-карта». При успешной инициализации появится статус «Card OK», при ошибке — «Initialization failed». Нажмите «Файлы» для просмотра списка заданий. Введите имя файла в поле и нажмите «Загрузить». Для ввода полётного задания, необходимо ввести имя файла в соответствующее поле и нажать кнопку «Загрузить». Имя файла полётного задания должно быть задано трехзначным числом от 000 до 999.
После загрузки параметры задания отобразятся в информационном окне. Подтвердите выбор кнопкой «Выбрать». Вернитесь в главное меню через «Стрелка назад».
- В верхней левой части экрана располагается информация об установленной прошивке системы.
- «Громкость». Позволяет регулировать громкость индикаций системы.
SD-карта
3.2. Тренировка
Переход во вкладку «Тренировка»
Чтобы перейти в режим тренировки, необходимо в «Главном меню» нажать на кнопку «Тренировка» (Рис. 3.2.1).

Режим «Тренировка»
В режиме «Тренировка» (свободного полёта) можно отрабатывать навыки управления квадрокоптером (Рис. 3.2.2), наблюдая за его поведением в воздухе и настраивая параметры. Также доступны данные о состоянии датчиков, таких как положение дрона, линейное ускорение, угловая скорость и угол ориентации. В этом режиме возможна настройка функции управления для слабовидящих пилотов. Для этого следует выбрать режим «ОВЗ» в настройках, после чего активируется звуковое оповещение, которое информирует о положении дрона.
Информационные поля, расположенные слева, отображают текущие значения углового ускорения по осям X, Y и Z. Если эти значения превышают установленные в настройках пороговые значения, поле будет подсвечиваться красным цветом.
Информационные поля справа показывают максимальные значения углового ускорения по осям, чтобы пилот мог настроить пороги значений, при которых в процессе пилотирования начисляются штрафные баллы. Оранжевая кнопка с отображением значения отклонения от курса (Yaw) позволяет сбросить это значение на ноль при нажатии. Если отклонение выходит за пределы установленного диапазона, воспроизводится специальный сигнал, информирующий о нарушении угла ориентации.
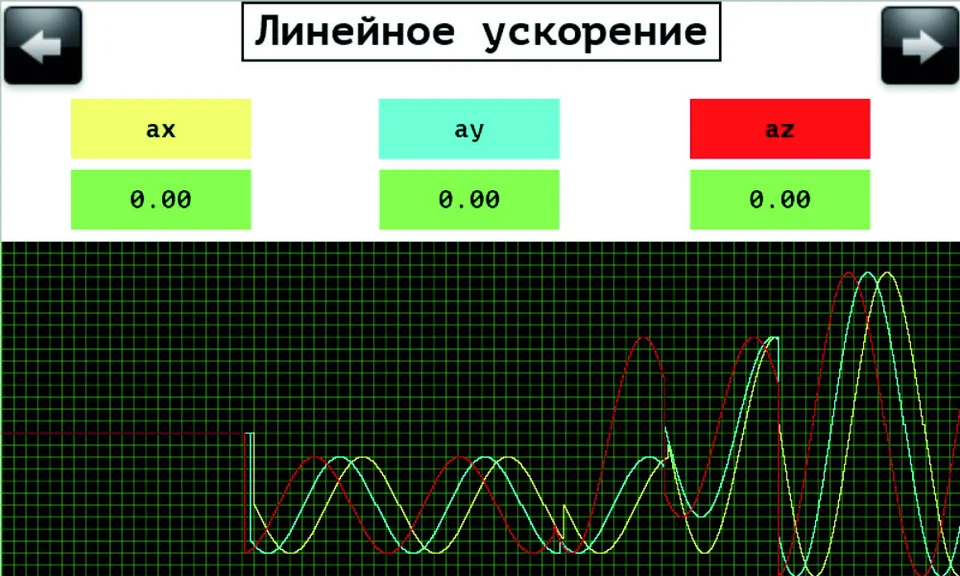
Линейное ускорение
Для просмотра показаний линейного ускорения необходимо нажать кнопку со стрелкой в верхнем правом углу экрана. Эти показания считываются с гироскопа и акселерометра. Гироскоп измеряет линейные ускорения, а акселерометр — угловые скорости. Совместная работа этих датчиков позволяет точно определять движение дрона в трехмерном пространстве.
Во вкладке выводится информация (Рис. 3.2.3) о линейном ускорении дрона по трем осям координатной системы. В верхней части экрана находятся текстовые поля, выделенные различными цветами, которые отображают текущие значения линейного ускорения дрона по осям X, Y и Z.
Ниже этих полей расположены числовые отображения значений линейного ускорения дрона в реальном времени. Каждое поле показывает данные для соответствующей оси: aX для оси X, aY для оси Y и aZ для оси Z. Значения обновляются в процессе полета.
Под числовыми значениями отображается график, который иллюстрирует изменения линейного ускорения по времени. Цвет каждой линии на графике соответствует цвету, использованному для оси, к которой эта линия относится. Позволяет идентифицировать изменение ускорения по каждой оси и следить за поведением дрона в динамике (данные на скриншоте являются симулированными и предоставлены для примера.Значения, показанные на графике, не соответствуют реальному поведению устройства).
В левом верхнем углу экрана расположена кнопка, которая позволяет вернуться на предыдущую вкладку. В правом верхнем углу находится кнопка, которая позволяет перейти на следующую вкладку, угловой скорости.
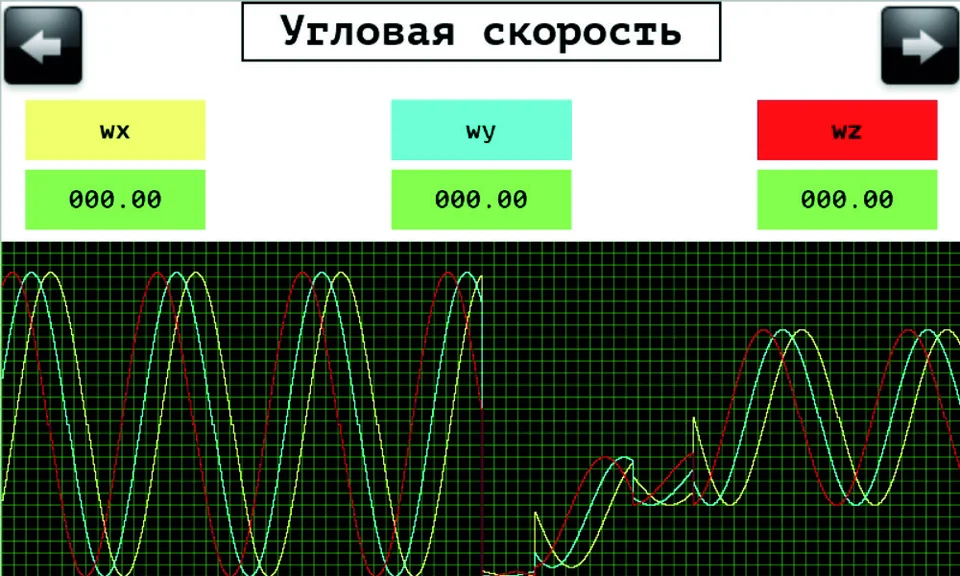
Угловая скорость
Данная вкладка (Рис. 3.2.4) предоставляет информацию об угловой скорости дрона по трём осям координатной системы. В верхней части экрана находятся текстовые поля, выделенные различными цветами, которые отображают текущие значения угловой скорости дрона по осям X, Y и Z.
Под этими текстовыми полями расположены числовые поля, в которых отображаются актуальные значения угловой скорости дрона в реальном времени. Каждое из этих полей представляет данные для соответствующей оси: wx — угловая скорость по оси X, wy — по оси Y, wz — по оси Z. Эти параметры обновляются в процессе полета для отслеживания изменения угловой скорости по каждой из осей на протяжении полета .
Ниже числовых полей представлен график, который иллюстрирует динамику изменения угловой скорости дрона по времени. Цвет каждой кривой на графике соответствует цвету, использованному для оси, с которой она связана (данные на скриншоте являются симулированными и предоставлены для примера. Значения, показанные на графике, не соответствуют реальному поведению устройства). Можно быстро и наглядно видеть, как изменяется угловая скорость по каждой оси, и оценивать поведение дрона в реальном времени.
В левом верхнем углу экрана расположена кнопка, которая позволяет вернуться на предыдущую вкладку. В правом верхнем углу находится кнопка, которая позволяет перейти на следующую вкладку, угол ориентации.
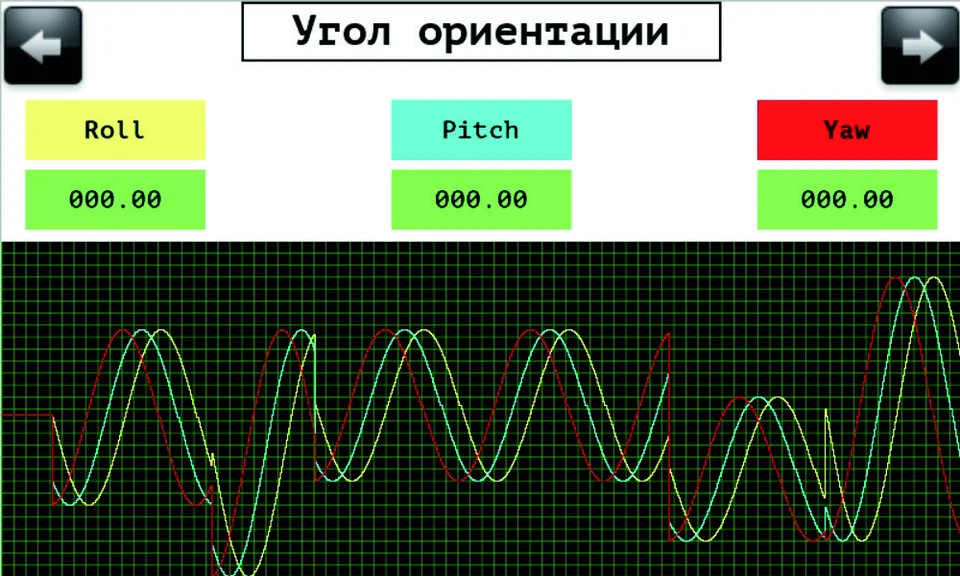
Угол ориентации
Данная вкладка (Рис. 3.2.5) предоставляет информацию об угле ориентации дрона, угол включает данные по трем основным углам: крену, тангажу и рысканию. Эти углы описывают поведение дрона в пространстве и его ориентацию относительно горизонтальной плоскости и вертикальных осей.
В верхней части экрана расположены текстовые поля, выделенные различными цветами, которые отображают текущие значения угла ориентации дрона по осям: Roll (крена) — по оси X, Pitch (тангаж) — по оси Y, и Yaw (рысканья) — по оси Z. Эти параметры обновляются в реальном времени, предоставляет информацию и возможность отслеживать изменения углов ориентации в процессе полета. Ниже текстовых полей с углами ориентации находятся числовые поля, в которых отображаются текущие значения этих углов. Эти числовые значения показывают точную ориентацию дрона по каждой из осей в данный момент времени, предоставляя точную информацию о его положении в пространстве. Под числовыми полями представлен график, на котором отображается изменение углов ориентации во времени. Цвет каждой кривой на графике соответствует цвету, используемому для соответствующей оси: крен (Roll), тангаж (Pitch) и рысканье (Yaw) (данные на скриншоте являются симулированными и предоставлены для примера. Значения, показанные на графике, не соответствуют реальному поведению устройства). График позволяет визуально оценить изменения ориентации дрона в процессе полета.
В левом верхнем углу экрана расположена кнопка, которая позволяет вернуться на предыдущую вкладку. В правом верхнем углу находится кнопка, которая позволяет перейти на следующую вкладку, индукция магнитного поля.

Индукция магнитного поля
Данная вкладка (Рис. 3.2.6) предоставляет информацию о значении индукции магнитного поля, в котором находится дрон. Магнитная индукция описывает силу и направление магнитного поля, воздействующего на дрон, важно для ориентации и навигации в пространстве.
В верхней части экрана находятся текстовые поля, выделенные различными цветами, которые отображают текущие значения индукции магнитного поля дрона по осям: hx — по оси X, hy — по оси Y и hz — по оси Z. Эти данные показывают силу магнитного поля в каждой из направляющих осей. Ниже текстовых полей расположены числовые поля, отображающие текущие значения индукции магнитного поля по каждой из осей (X, Y, Z). Эти значения обновляются в процессе полета, давая точную информацию о текущем состоянии магнитного поля, которое влияет на дрон в момент наблюдения. Под числовыми полями отображается график, который показывает изменения значений индукции магнитного поля во времени. Цвет каждой кривой соответствует цвету, использованному для соответствующей оси (X, Y, Z) (данные на скриншоте являются симулированными и предоставлены для примера. Значения, показанные на графике, не соответствуют реальному поведению устройства).
В левом верхнем углу экрана расположена кнопка, которая позволяет вернуться на предыдущую вкладку.
3.3. Пилотирование
Для перехода в режим пилотирования необходимо нажать на кнопку «Пилотирование» в главном меню. Перед входом в вкладку система попросит выбрать учетную запись или создать нового.
Выбор учетной записи

Пилотирование
На странице отображается текущее положение квадрокоптера в комплексе по осям Z, X, Y (Рис. 3.3.1). Информационные поля, расположенные слева показывают текущие значения углового ускорения по осям X, Y, Z. При превышении значений, указанных в настройках, поле будет подсвечиваться красным цветом и будут начисляться штрафные баллы при выполнении полётного задания.
Для выбора определенного режима пилотирования необходимо нажать на кнопку «Режим...». Появится меню с выбором режимов.
При нажатии на кнопку «Режим 1» выбирается полётное задание перемещения между различными заданными точками внутри конструкции на скорость.
При нажатии на кнопку «Режим 2» выбирается полётное задание перемещения между различными точками с удержанием положения дрона в течении заданного времени внутри зоны. При вылете из зоны начисляются штрафные баллы.
Сложность прохождения полётных заданий задается в вкладке «Настройка».
Для просмотра полетной миссии нажмите «Просмотр».

Пилотирование
При нажатии на кнопку «Режим 3.» При нажатии генерируется новый уровень со случайным маршрутом (как настроено на странице настроек генератора). (Рис. 3.3.2) За время режим, в котором за 3 минуты (180 секунд) нужно успеть посетить как можно больше точек. Каждая новая точка случайна (как яблоко в игре «змейка»)
___.TXT Это то самое задание, которые было загружено из файла. После выбора и загрузки файла имя автоматически сюда подставляется. И будет уже 111.TXT (для заданий из этого файла).
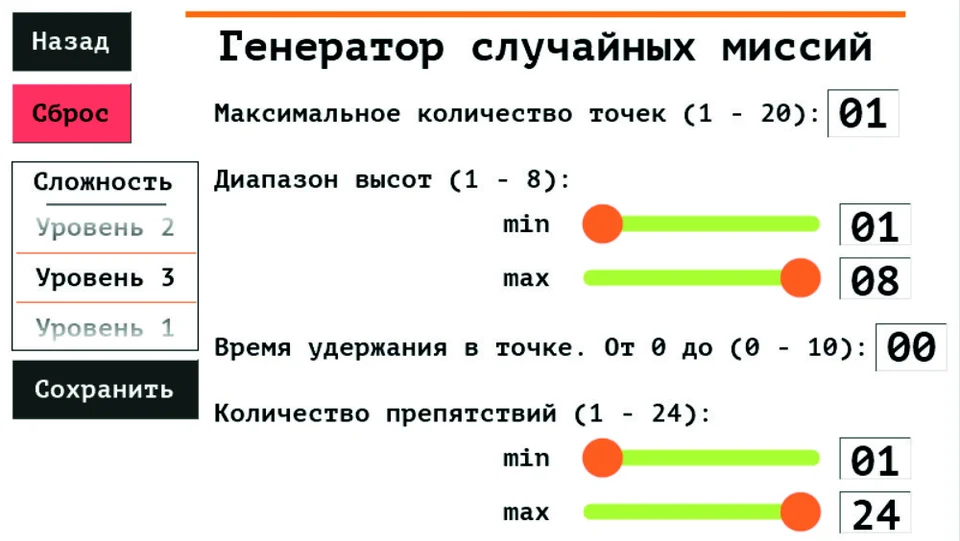
Гинератор случайных чисел
Генератор случайных миссий позволяет настроить каждый из режимов. Регулируется диапазон высот, время удержания в точке и количество препятствий. Указывать можно минимальное и максимальное значение.
3.3.1. Создание полетного задания
Возможные варианты режимов для создания полетного задания:
- Вариант режимов в котором полет по заданному маршруту полетного задания не подразумевает препятствия, количество препятствий устанавливаем на «0»:
Режим зависания в точках — маршрут подразумивающий остановку в указанных точках с условием, что хотя бы в одной точке задано время зависания больше «0» секунд. Режим прохождения маршрута по точкам — маршрут полетного задания, в котором подразумивается пролет по заданным точкам без остановки с условием, что во всех точках время зависания равно «0» секунд.
- Вариант режимов в котором полет по заданному маршруту полетного задания подразумевает препятствия, количество препятствий устанавливаем на «1» и больше:
Режим облёта препятствий с зависанием в точках — если хотя бы в одной точке указано время зависания больше 0. Режим облёта препятствий с прохождением точек — если для всех точек маршрута время зависания установлено на 0.
Рассмотрим процесс создания полётного задания для различных режимов:
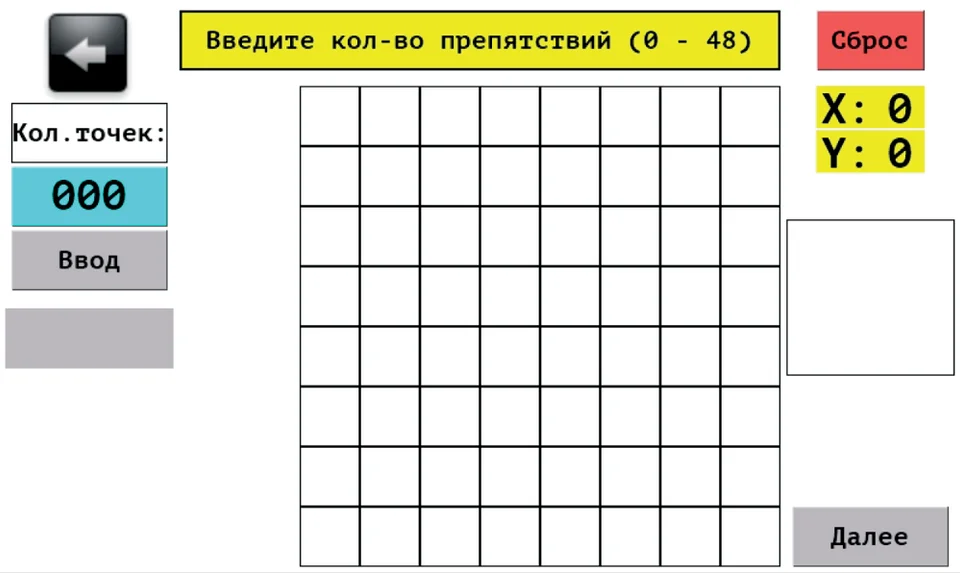
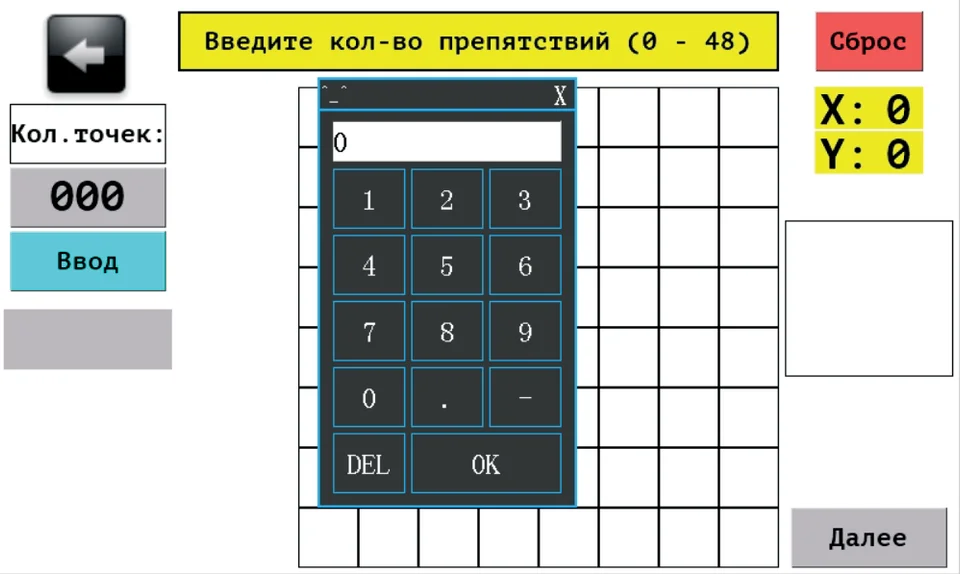
Режим зависания в точках В этом режиме препятствия не предусмотрены. На странице добавления препятствий устанавливаем количество препятствий равным «0», для чего вводим «0» в поле «Кол. точек». Нажимаем кнопку «ОК», затем кнопку «Ввод». В качестве подсказки подсвечивается кнопка «Далее», на которую нажимаем для перехода к следующему этапу (Рис. 3.3.5 Рис. 3.3.7).
Зависание в точках
Зависание в точках
На этапе добавления точек маршрута выполняем следующие действия:
- Нажимаем на поле ввода «Кол. точек:» и вводим необходимое количество точек.

Поле ввода
- Подтверждаем выбор.
- Нажимаем кнопку «Ввод» для сохранения изменений.
- После ввода в информационном окне появляется информация о полетном задании: режим, максимальный результат (счёт), количество точек.
- Устанавливаем время удержания дрона в точке, нажав на поле ввода «Время:» и введя нужное значение. Если указать «0», точка будет пройдена без остановки, аналогично режиму полета по точкам без зависания в ней.

Ввод количества точек
Информационное окно
- Вводим координаты точки, выбирая соответствующие поля по осям Z и XY (Рис. 3.3.10). После нажатия поле подсвечивается зелёным цветом (Рис. 3.3.11) и отображает номер точки. Важно: ввод следующей точки возможен только после указания всех координат (XY и Z).

Выбор координаты точки
- Подтверждаем введённые данные (время удержания и координаты), нажав кнопку «Сохранить». Информация о точке (координаты в заданном формате и время удержания) появится в информационном окне.

Ввод количества точек
- Повторяем шаги для всех оставшихся точек маршрута.
- Проверяем корректность введённых данных в информационном окне после добавления всех точек. В случае ошибки очищаем введённую информацию и начинаем добавление точек заново. Для этого дважды нажимаем кнопку «Сброс»: первый раз — для удаления данных, второй — для очистки страницы.
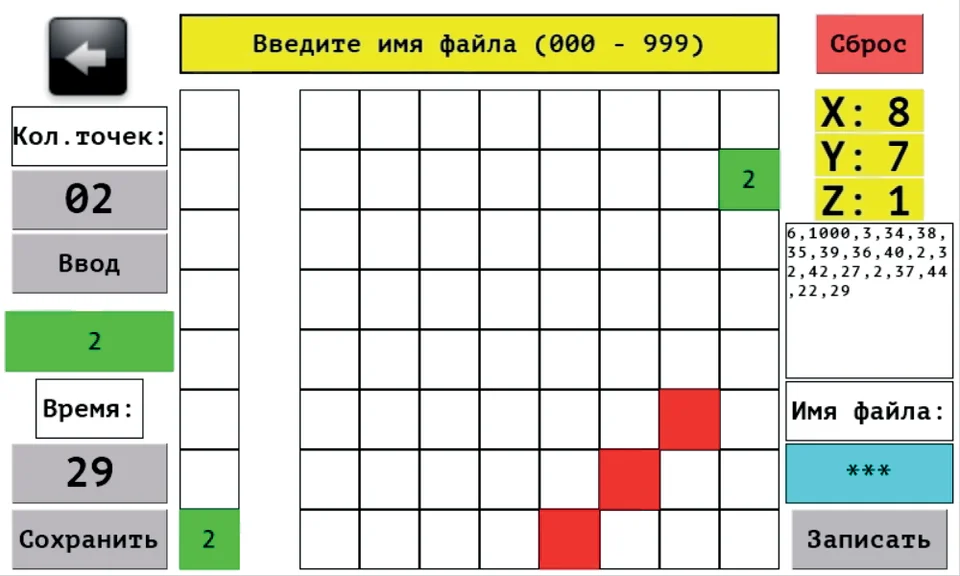
- Для сохранения полётного задания вводим имя файла в поле «Имя файла». Название должно состоять из трёхзначного числа от 000 до 999 (Рис. 3.3.12).

Ввод количества точек
- Нажимаем кнопку «Записать». После успешного сохранения появится сообщение «File created». Если запись не удалась, выбираем другое имя файла и повторяем попытку записи (Рис. 3.3.13).

Ввод имени файла
Режим прохождения маршрута по точкам В этом режиме дрон будет двигаться от одной точки к другой, следуя заранее заданному маршруту. Создание задания включает добавление точек маршрута, без зависания (Рис. 3.3.14).
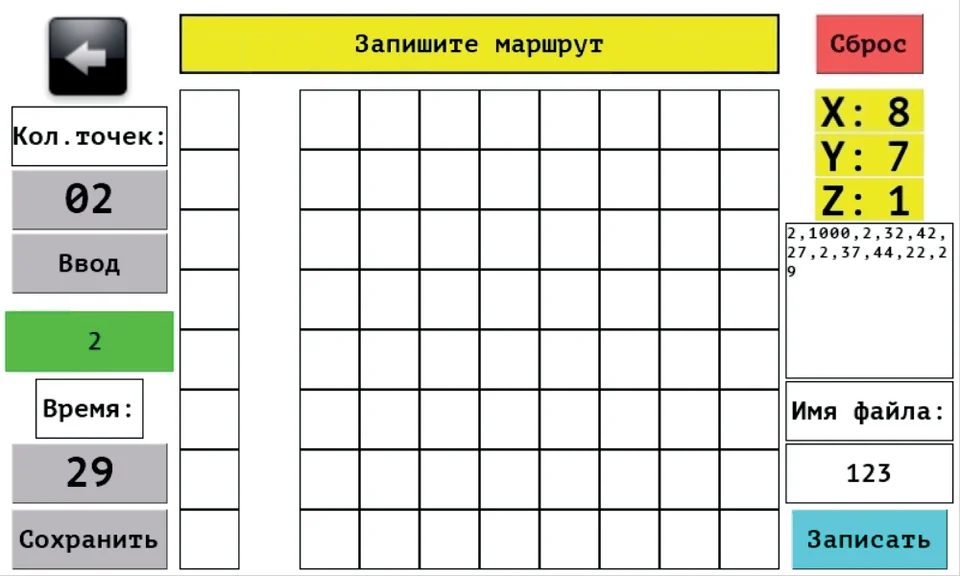
Запись маршута
В этом режиме отсутствуют препятствия, а дрон не задерживается в точках маршрута, поскольку время зависания для каждой точки задается значением «0».
Процесс создания маршрута аналогичен описанному в разделе (Режим зависания в точках), с единственным отличием: при вводе параметров точек всегда устанавливаем время зависания равным «0».
Режим облёта препятствий с зависанием в точках Задача в этом режиме — не только зависать в точках маршрута, но и избегать препятствий. Для создания задания необходимо добавить как точки маршрута, так и препятствия, которые дрон должен облетать. Важно правильно настроить алгоритм обхода препятствий, чтобы дрон мог безопасно маневрировать и выполнять зависания в точках. Перед созданием самого маршрута добавляем препятствия (Рис. 3.3.15).
- На странице добавления препятствий указываем их количество, введя нужное значение в поле «Кол. точек». Затем нажимаем «Ок» и подтверждаем ввод кнопкой «Ввод». Важно! Для препятствий задаются только координаты XY. Они представляют собой условные «столбцы», которые необходимо облетать.
- В верхней части страницы появляется подсказка «Выберите точки препятствия» (Рис. 3.3.15).
- Определяем координаты препятствия, нажав на соответствующее поле осей XY. После нажатия:
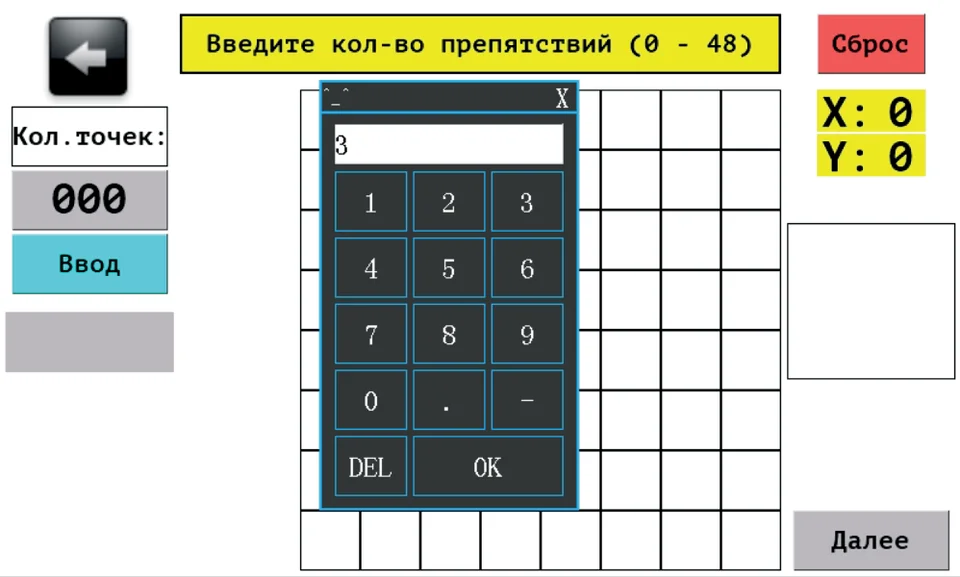
Ввод колическа препядствий
Поле подсвечивается красным (Рис. 3.3.16). Увеличивается значение в полосе прогресса. В информационном окне отображаются координаты добавленного препятствия.
- Повторяем шаг 3 для всех оставшихся препятствий.
- После добавления всех препятствий проверяем корректность ввода в информационном окне.

Выбор точек препятствий
В случае ошибки очищаем введённые данные и начинаем добавление заново. Для этого дважды нажимаем кнопку «Сброс»:
Первый раз — для удаления данных.
Второй раз — для полной очистки страницы.
Важно! Если препятствия уже добавлены и на следующей странице началось добавление точек маршрута, нажатие «Сброс» на этой странице приведёт к полному удалению полётного задания. В этом случае необходимо повторно внести и препятствия, и точки маршрута.
- После завершения кнопка «Далее» подсвечивается в качестве подсказки. Нажимаем её для перехода к следующему этапу (Рис. 3.3.17).
Дальнейшие шаги выполняем аналогично разделу (Режим зависания в точках), но с учётом особенностей:
В области XY теперь есть красные ячейки, обозначающие препятствия. Добавление точек маршрута в ячейки с препятствиями невозможно. Выбор координат для прохождения только из доступных (не занятых) зон.

Выбор точек препятствий
Режим облёта препятствий с прохождением точек В этом режиме дрон двигается по маршруту, облетая препятствия, проходя через заданные точки. Для создания задания требуется добавить точки маршрута и указать препятствия, которые дрон должен избегать (Рис. 3.3.18).
Выбор точек препятствия и ввод контрольных точек.
Создание маршрута в этом режиме аналогично процессу, описанному в разделе (Режим облёта препятствий с зависанием в точках), с учетом исключения, что для каждой точки маршрута устанавливаем время зависания равным 0.
3.3.2. Загрузка полетного задания
Перед загрузкой убедитесь, что в памяти тренажёра имеются файлы базовых полётных заданий ХХХ.TXT, либо заранее созданные файлы (см. Создание полётного задания).
Процесс загрузки полётного задания.
Перейдём в раздел «SD-карта»: Для этого переходим в «Главное меню» --> «Настройки» --> «SD-карта».
(Рис. 3.3.19). Если SD-карта успешно инициализирована, в текстовом поле 3 увидим сообщение «Card OK»
(Рис. 3.3.20). В случае ошибки появится «Initialization failed».

SD-карта
Выводим список файлов: Нажимаем кнопку «Список заданий».

Рис. 3.3.20. «Card OK»
В текстовом поле отобразится перечень файлов, хранящихся на SD-карте (Рис. 3.3.21). Выбираем файл полётного задания: Выбираем нужный файл полётного задания: Открываем поле ввода «*»** и вводим имя файла (3 символа) (Рис. 3.3.22). Загружаем полётное задание:

Перечень файлов
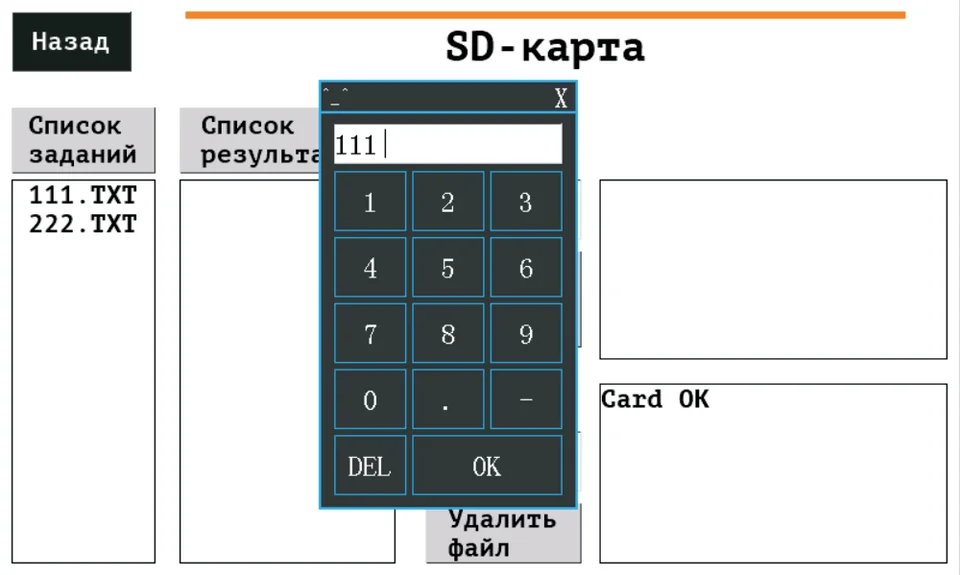
Ввод имени файла
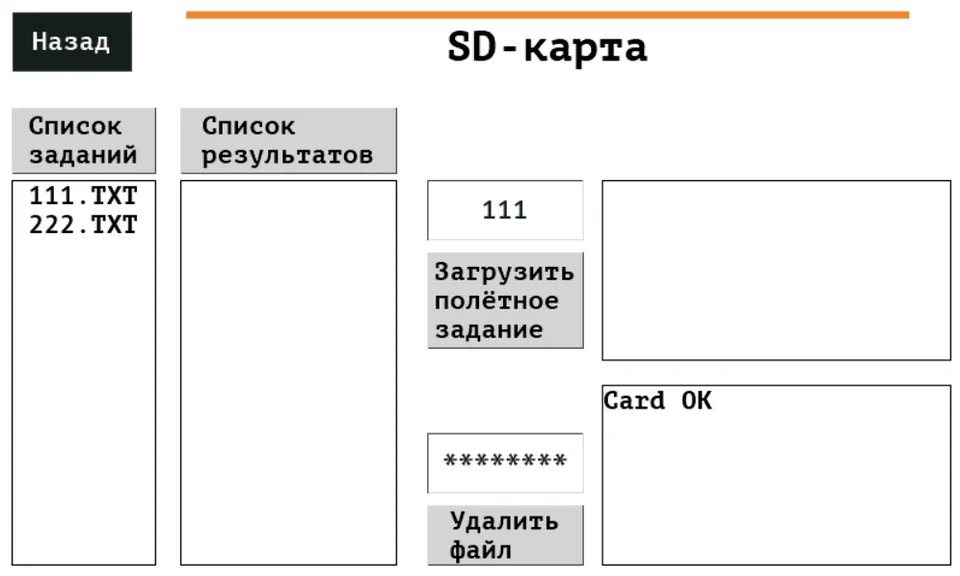
Загрузка полетного задания
Нажимаем «Загрузить полётное задание» (Рис. 3.3.23). В текстовом поле 3 отобразится сообщение «File name: [Введённое_ имя]».
Успешная загрузка
Если файл отсутствует, увидим «File not found», если найден – «File [Введённое_имя] found». В случае успешной загрузки содержимое задания появится в текстовом поле 2 (Рис. 3.3.24).
3.4. Обновление прошивки
Для обеспечения стабильной работы стенда для отработки навыков управления квадрокоптером рекомендуется производить обновление программного обеспечения. Актуальные версии прошивки включают улучшения в алгоритмах управления, расширение функциональности, исправление возможных ошибок, а также поддержку новых режимов и сценариев полёта.
Процесс обновления осуществляется с помощью специальной программы, предназначенной для перепрошивки стенда. Для корректного выполнения процедуры обновления необходимо следовать инструкциям и рекомендациям.
3.4.1. Установка программы
Скачиваем программу через официальный репозиторий на странице Wiki проекта
Нажимаем «Ссылка для скачивания» — после этого браузер перенаправит на страницу GitHub, где выбираем подходящую версию под вашу операционную систему и скачиваем её.
Загрузка полетного задания
- Устанавливаем программу, следуя стандартной процедуре установки ПО для вашей операционной системы.
![]()
Ярлык программы
3.4.2. Загрузка и запуск
Процесс загрузки обновлений основного контроллера и модуля дисплея представлен на рисунках 3.4.4 – 3.4.13.
- Запускаем программу двойным кликом по исполняемому файлу. Перед запуском убеждаемся в наличии стабильного интернет-соединения — оно необходимо для загрузки файлов прошивки. Дожидаемся полной загрузки и появления главного окна приложения с элементами управления процессом обновления.
Окно загрузки приложения
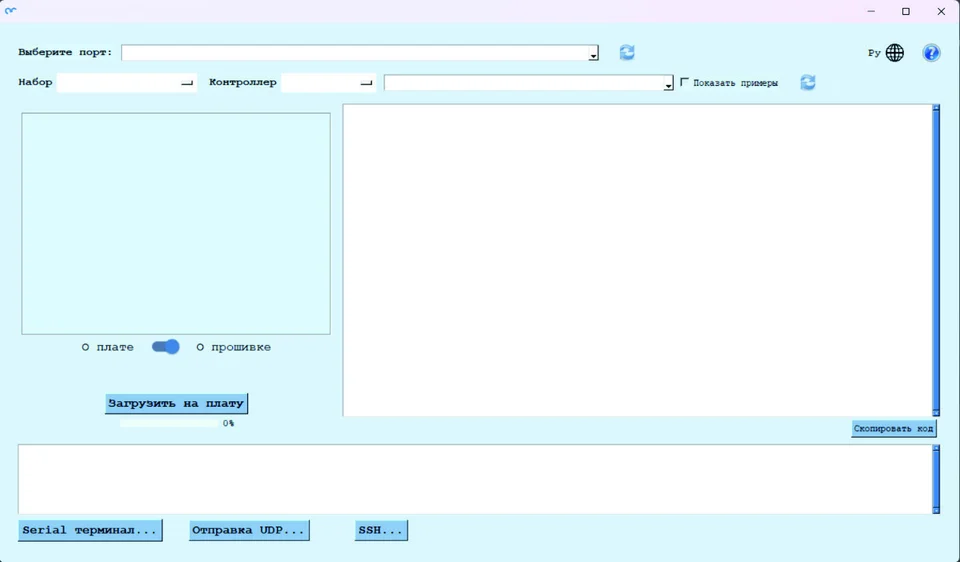
Основное окно программы обновления
- Используя комплектный кабель Type-C, соединяем контроллер панели управления с USB-портом компьютера.
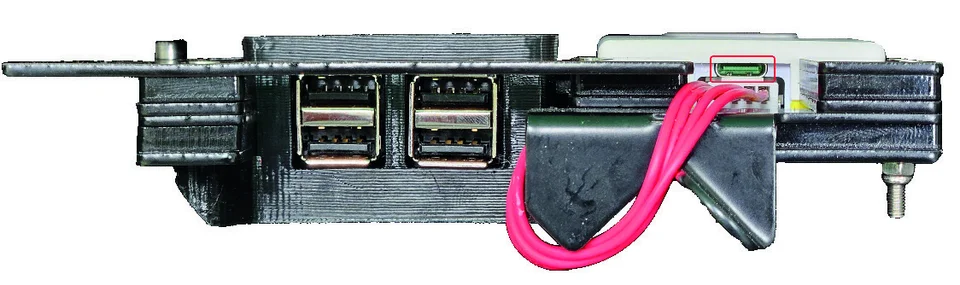
Разъем Type-C контроллера
- В интерфейсе программы нажимаем кнопку «Обновить список устройств», после чего выбираем из списка COM-порт, к которому подключён контроллер.

Выбор COM-порта
- В поле «Набор» указываем профиль оборудования — «Учебный стенд БАС».

Поле выбора набора
- Из выпадающего списка в поле выбора контроллера выбираем «Main Controller» для обновления основной микропрограммы.
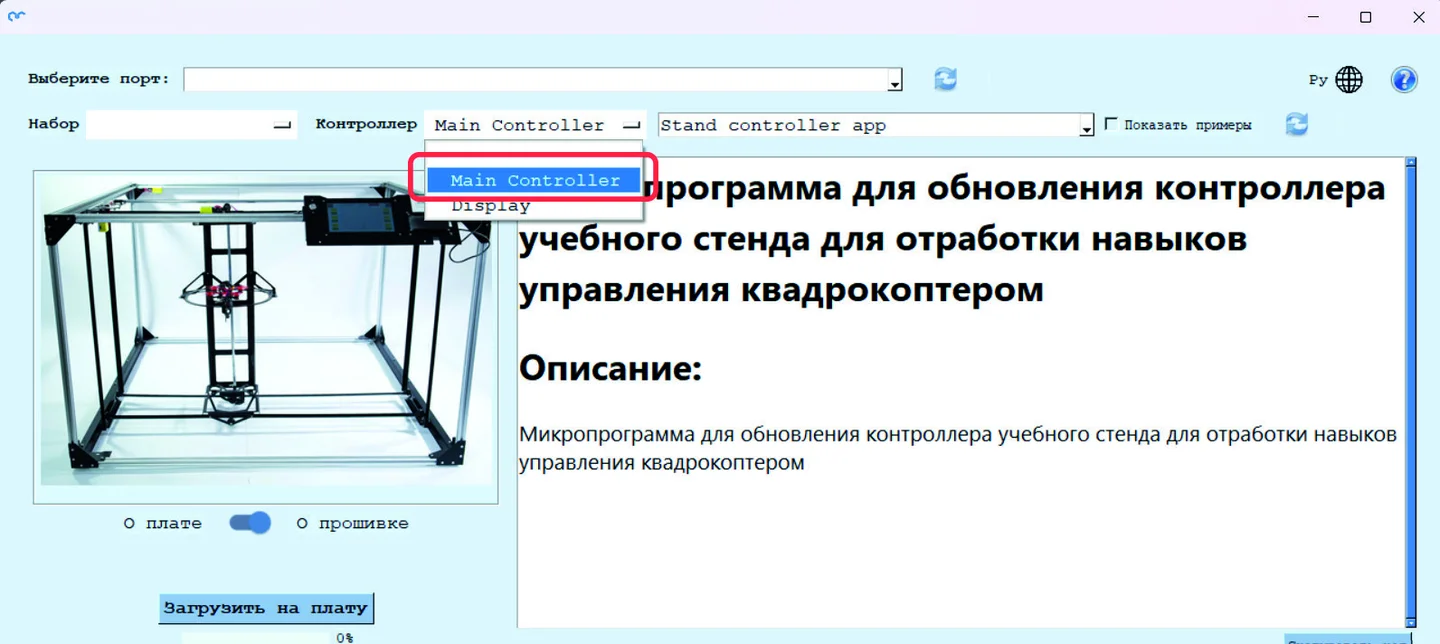
Поле выбора контроллера
- В соответствующем поле выбираем актуальную версию прошивки.
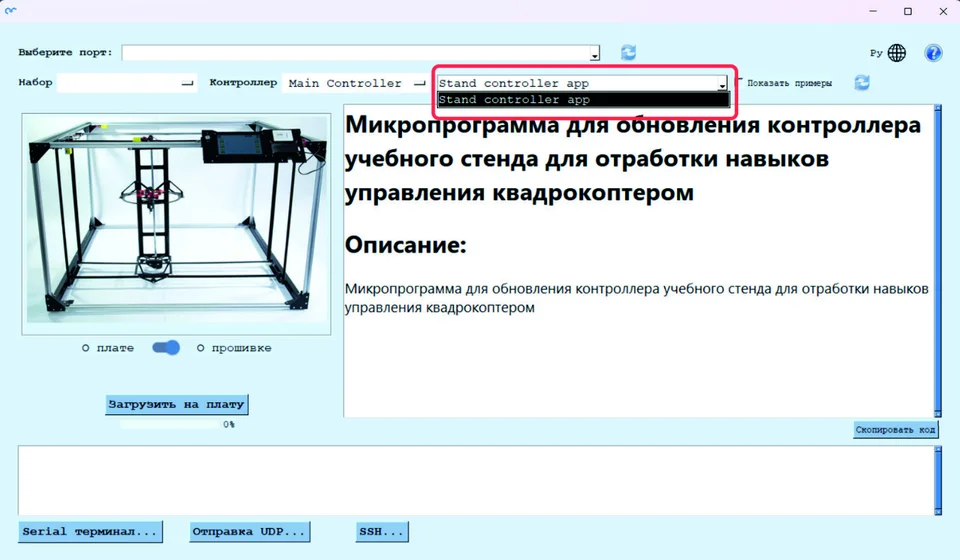
Поле выбора версии прошивки
- Нажимаем кнопку «Загрузить на плату». Программа автоматически скачает выбранный файл прошивки и запишет его в память основного контроллера.
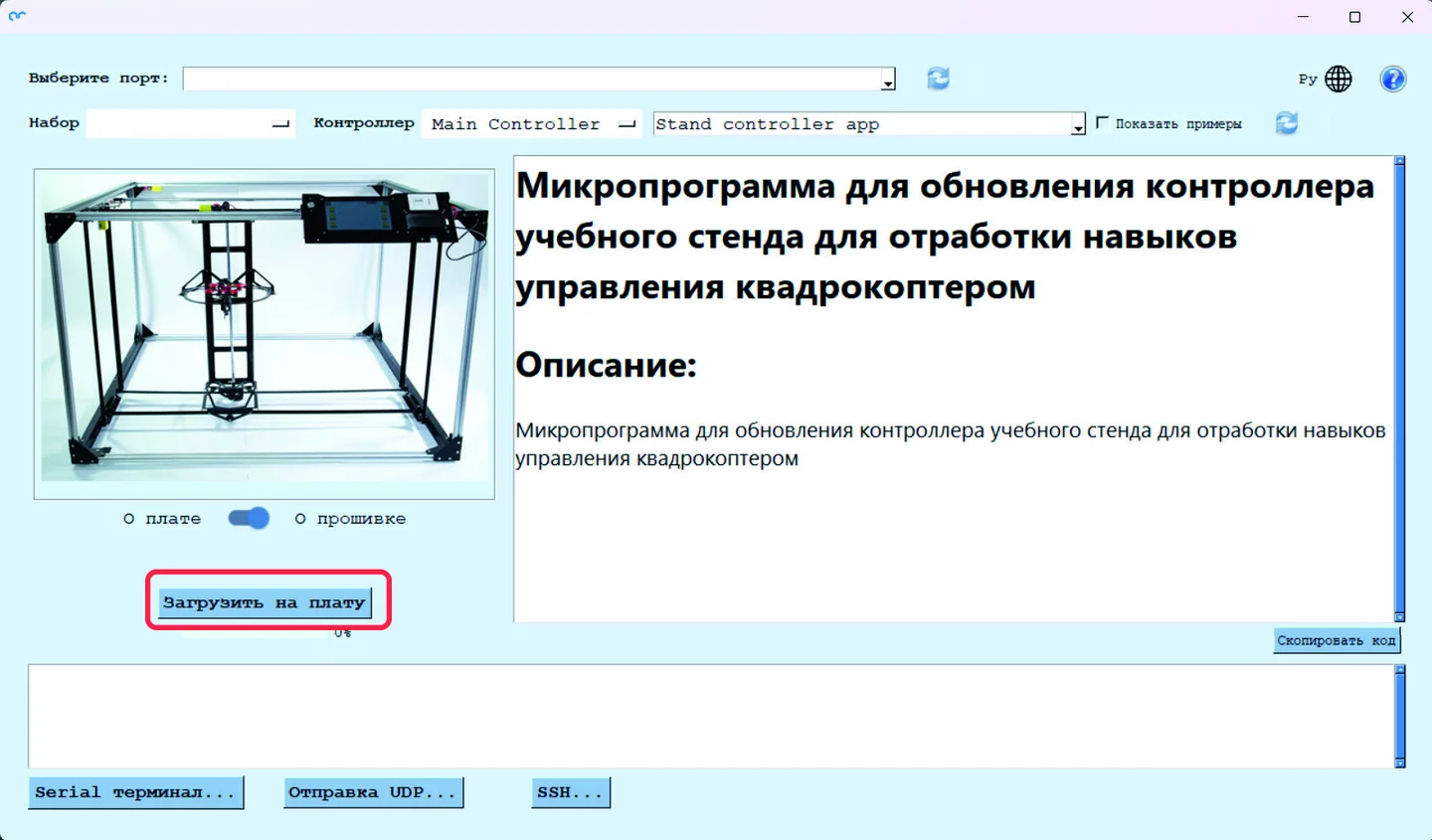
Кнопка загрузки обновления в интерфейсе
- Ход процесса отображается прямо в интерфейсе — остаётся лишь дождаться его завершения.
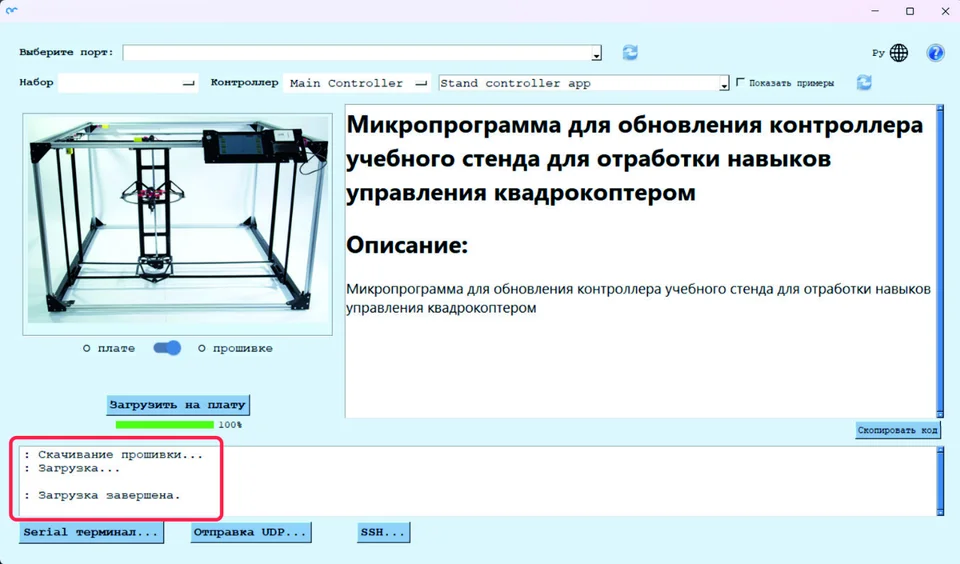
Процесс загрузки обновления на контроллер
- Повторяем процедуру для дисплейного модуля: в поле выбора контроллера указываем «Display», выбираем актуальную версию микропрограммы и запускаем загрузку. Стоит учесть, что обновление дисплея занимает заметно больше времени — процесс может длиться до 20 минут.
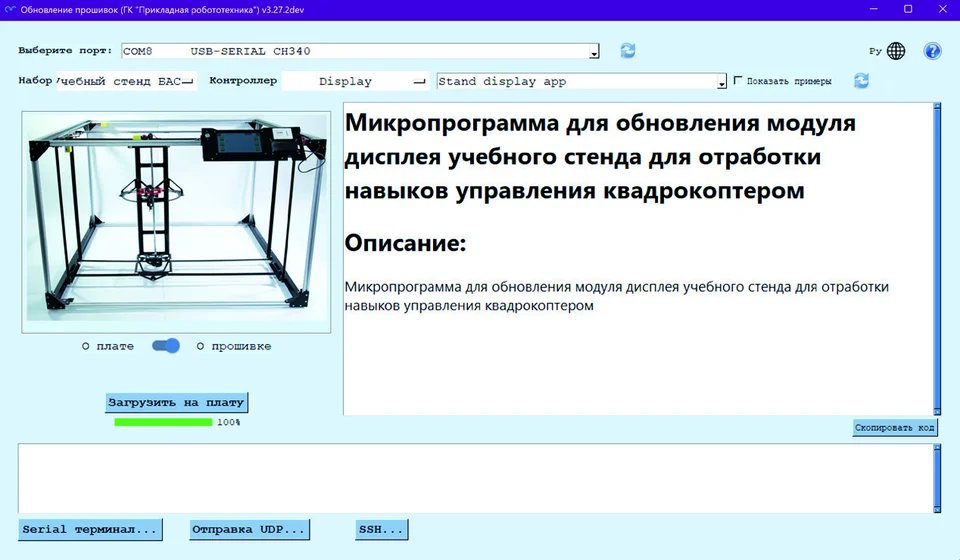
Обновление модуля дисплея
- После завершения всех операций открываем окно «Настройки» панели управления. Там отобразятся текущие версии микропрограмм как основного контроллера, так и дисплейного модуля — это подтверждает, что обновление выполнено корректно.