Задача №6. Распознавание и вычисление расстояния до шара. Отправка данных о расстоянии на внешний контроллер по DXL
Следующий код детектирует красный шарик на изображении с камеры, рассчитывает расстояние до него с помощью карты глубины и отправляет данные о расстоянии на другие устройства по DXL-протоколу.
Разберем код детальнее, его можно найти по пути: ~/SVCAM/cases/recognition_object/src/main.cpp
Это полноценное автономное приложение, которое:
· Подключается к потоку изображений камеры SVCAM через TrackingCamReader (RGB + глубина)
· Загружает параметры камеры из config/config.yaml
· Находит круглый объект методом Хафа на сером изображении
· Извлекает среднюю глубину из области объекта.
· Вычисляет 3D-координаты и евклидово расстояние до объекта.
· Записывает расстояние (в мм) в регистр 24 модуля, чтобы можно было считать данные на контроллере OpenCM.
· Отображает результат на экране (опционально).
Данная программа работает аналогично программе, которую рассмотрели в задаче 2 (см. Задача №2 Вычисление расстояния до объекта при неизвестных габаритах).
Основные пункты, на которые следует обратить внимание:
- Подключение необходимых библиотек для обработки изображения и отправка данных по DXL.
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc.hpp>
#include <yaml-cpp/yaml.h>
#include <trackingcam3d_reader/TrackingCam3d_Reader.h>
#include "dxlSlave.h"Библиотека opencv для обработки изображений.
Библиотека yaml-cpp для загрузки параметров с файла конфигурации.
Библиотека trackingcam3d_reader для получения изображений с камеры.
Библиотека dxlSlave для Dxl связи и отправка данных на периферийные устройства по Dxl протоколу.
- Инициализация адрес регистра, куда будем записать данные о расстоянии до объекта (регистр 24).
#define DIST_ADDR 24- Обработка сигнала CTRL+C для безопасного завершения программы. Для работы данной функции, необходимо подключение стандартных библиотек “atomic” и “signal.h”.
std::atomic<bool> stop{false};
void signalHandler(int signum)
{
stop.store(true, std::memory_order_relaxed);
}В программе отслеживается нажатие на сочетание клавиш CTRL+C, вызывая метод в начале функции main.
signal(SIGINT, signalHandler);- Инициализация объекта DxlSlave. Если подключение не проходит, т.е. программа не может подключиться к сервису dxlSlave.service, то выводится сообщение об ошибке и завершается программа.
DxlSlave slave;
if (!slave.connect()) {
std::cerr << "DxlSlave connection error" << std::endl;
return 1;
}- Загрузка параметров конфигурации кейса в файле config/config.yaml.
YAML::Node config;
std::string config_base_path = "../config/";
std::string config_path = config_base_path + "config.yaml";
try {
config = YAML::LoadFile(config_path);
}
catch (YAML::BadFile& e) {
slave.disconnect();
std::cerr << "Failed to load config file " << config_path<< std::endl;
return 1;
}
const double fx =
config["camera"]["intrinsics"]["fx"].as<double>();
const double fy =
config["camera"]["intrinsics"]["fy"].as<double>();
const double m_cx =
config["camera"]["intrinsics"]["cx"].as<double>();
const double m_cy =
config["camera"]["intrinsics"]["cy"].as<double>();
const double inv_fx = 1 / fx;
const double inv_fy = 1 / fy;
const bool display_flag = config["display"].as<bool>();
const int max_no_frames = config["max_no_frames"].as<int>();
const int read_delay_ms = config["read_delay_ms"].as<int>();
const float min_valid_pixel_percent =config["min_valid_pixels_percent"].as<float>();
const double max_depth = config["max_depth_mm"].as<double>();- Подключение камеры при объявлении объекта TrackingCamReader. При объявлении задаётся запрос на типы изображений, которые необходимы и количество кадров для каждого потока. Для данного кейса нужны изображения left и depth. При неуспешном подключении к потокам изображений программа завершается.
const std::vector<std::string> stream_requests = {"left=100000",
"depth=100000"};
TrackingCamReader cam_reader(stream_requests);
if (!cam_reader.connect())
{
slave.disconnect();
std::cerr << "Failed to connect camera client" << std::endl;
return 1;
}- Основная логика обработки кадров. Данный участок кода работает пока не сработало сочетание клавиш CTRL+C.
while (!stop.load(std::memory_order_relaxed))Проводится получение синхронизированных RGB и depth изображений как и расчёт расстояния до объекта. Получение новых изображении в цикле проводится следующим образом:
auto frames = cam_reader.getLatestFrames();Если не получены изображения левой камеры или карты глубины, происходит пропуск дальнейшее выполнение данного цикла с помощью команды continue.
if (frames.find("left") != frames.end() && !frames["left"].empty()) {
last_left = frames["left"].clone();
}
if (frames.find("depth") != frames.end() && !frames["depth"].empty())
{
last_depth = frames["depth"].clone();
}
if (last_left.empty() || last_depth.empty()) {
std::this_thread::sleep_for(std::chrono::milliseconds(read_delay_ms /
2));
continue;
}- Отправка данных по DXL. После расчёта расстояния обновляется значение регистра DIST_ADDR, где сохраняется значение расстояния до объекта в мм. Если объект не найден, то значение расстояния равно 0.
slave.callMethod(DIST_ADDR, dist_mm);Проводится запись значения расстояния в мм в регистр DIST_ADDR.
- Отображение результата на экран (если включен параметр визуализации display в файле конфигурации config/config.yaml). Если объект найден, то на визуализации отображается окружность вместе с текстом о расстоянии до объекта.
if (display_flag) {
cv::circle(rgb, center, (int)best_r, cv::Scalar(0, 255, 0), 2);
std::string dist_str = "Dist: " + std::to_string(best_dist).substr(0, 4) + "m";
cv::putText(rgb, dist_str, cv::Point(center.x, center.y - 5),
cv::FONT_HERSHEY_SIMPLEX, 0.6, cv::Scalar(255, 255, 255), 2);
}Ввывод RGB изображения на экран:
if (display_flag)
{
cv::Mat rgb_resized;
cv::resize(rgb, rgb_resized, cv::Size(320, 240));
cv::imshow("Circle Detection", rgb_resized);
if (cv::waitKey(1) == 27) // Если нажат ESC, то завершаем программу
{
stop.store(true, std::memory_order_relaxed);
continue;
}
}- Завершение программы.
slave.callMethod(DIST_ADDR, 0); // Сброс регистра на 0
cam_reader.disconnect(); // Закрытие соединения с камерой
slave.disconnect(); // Закрытие DXL соединения
cv::destroyAllWindows(); // Для закрытия окна визуализации
return 0;Для того, чтобы включить/выключить отображение изображений на экран нужно изменить параметр display (true - вкл, false - выкл) в файле конфигурации config/config.yaml. Открываем config-файл с помощью следующей команды:
nano ~/SVCAM/cases/recognition_object/config/config.yaml
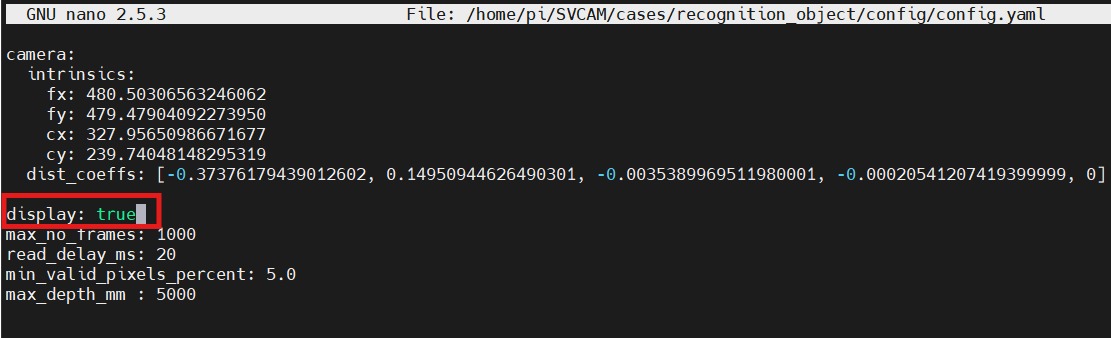
Рис.39 Файл конфигурации кейса
Чтобы избежать перегрузки микрокомпьютера (не хватает GPU) рекомендуется использовать функционал отображения на экран только для отладки.
Необходимо собрать проект recognition_object перед запуском:
cd ~/SVCAM/cases/recognition_object/
mkdir -p build && cd build
cmake ..
make
Для запуска задачи, выполняем следующие команды:
cd ~/SVCAM/cases/recognition_object/build/
./recognition_object

Рис. 40. Пример работы программы кейса и визуализации
Чтение данных на внешнем контроллере по DXL
Если внешний контроллер подключён к модулю SVCAM по интерфейсу DXL, он может считывать значения регистров модуля. Это позволяет, например, получать данные о расстоянии до объекта, измеренные стереокамерой.
Рассмотрим пример чтения данных о расстоянии на контроллере OpenCM 9.04 с платой расширения STEM Board. На этой плате DXL-порт контроллера управляется интерфейсом Serial3, что соответствует порту с номером 3 в DynamixelSDK.
Ниже представлена пример программы для OpenCM, которая считывает значение из регистра 24, хранящего расстояние до объекта в миллиметрах.
cpp
#include <DynamixelSDK.h> // Библиотека DynamixelSDK
#define DEVICENAME "3" // номер DXL порта OpenCM (Serial3)
#define DATA_ADDR 24 // Адрес регистра, который хотим прочитать
#define PROTOCOL_VERSION 1.0
#define BAUDRATE 115200
#define DXL_ID 1 // ID SVCAM, в файле конфиг /usr/bin/dxl/config.json
dynamixel::PortHandler *portHandler;
dynamixel::PacketHandler *packetHandler;
uint32_t data = 0;
float distance = 0.0f; // Расстояние до объекта в м
void setup()
{
Serial.begin(115200);
while(!Serial) {}
portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME);
packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOCOL_VERSION);
if (!portHandler->openPort()) {
Serial.println("Failed to open port!");
while(1);
}
portHandler->setPacketTimeout(200.0);
if (!portHandler->setBaudRate(BAUDRATE)) {
Serial.println("Failed to set baudrate!");
while(1);
}
Serial.println("Ready to read distance data.");
}
void loop()
{
int dxl_comm_result = packetHandler->read4ByteTxRx(portHandler,DXL_ID,
DATA_ADDR, &data);
distance = data / 1000.0;
Serial.print("Distance to object: "); Serial.println(distance);
delay(40);
}Подключаем камеру к OpenCM и запускаем программы на микроконтроллере и камере.

Рис.42 Соединение модуля SVCAM и микроконтроллера OpenCM по DXL через плату расширения STEM Board

Рис.43 Пример чтения данных о расстоянии до шарика на микроконтроллере OpenCM
Пример кода для чтения расстояния на микроконтроллере DXL-IOT:
cpp
#include "DxlMaster.h" // Подключение библиотеки
#define BAUDRATE 115200 // скорость порта DXL
#define ID 1 // Номер устройства
#define DIST_ADDR 24 // Адрес, где хранится расстояние
DynamixelDevice svcam(ID);
float distance = 0.0f;
uint32_t data = 0;
void setup() {
Serial.begin(115200);
while (!Serial);
DxlMaster.begin(BAUDRATE);
svcam.read(DIST_ADDR, data);
uint8_t status = svcam.init();
}
void loop()
{
svcam.read(DIST_ADDR, data);
distance = data / 1000.0;
Serial.print("Distance to object: "); Serial.println(distance);
delay(40);
}